
Fターム[3J552VA32]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 伝動装置からの情報 (9,884) | 変速機入力軸状態 (1,793) | 回転数 (1,459)
Fターム[3J552VA32]の下位に属するFターム
変化率 (107)
Fターム[3J552VA32]に分類される特許
81 - 100 / 1,352
無段変速機の変速制御装置及びその変速制御方法
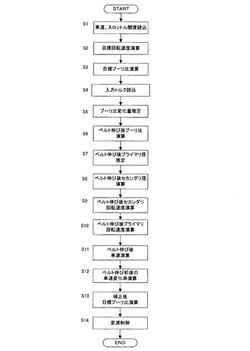
【課題】全変速領域においてフィードバック量の蓄積を抑制して変速動作の遅延を防止する。
【解決手段】本発明は、入力側のプライマリプーリ11と、出力側のセカンダリプーリ12と、各プーリに掛け回される帯状の駆動力伝達部材13とを有し、各プーリと駆動力伝達部材13との接触半径を変化させることでプーリ比が変化する無段変速機の変速制御装置であって、車両の運転状態に基づいて目標プーリ比を演算する目標プーリ比演算手段S3と、プライマリプーリ11への入力トルクと目標プーリ比とに基づいて駆動力伝達部材13の伸びによって変化するプーリ比の変化量を推定するプーリ比変化量推定手段S5と、目標プーリ比にプーリ比変化量を加算することで、駆動力伝達部材13の伸びが生じた場合のプーリ比である伸び後プーリ比を演算する伸び後プーリ比演算手段S6と、実プーリ比を伸び後プーリ比へと制御するプーリ比制御手段S14とを備える。
(もっと読む)
無段変速機の変速制御装置及びその変速制御方法

【課題】駆動ベルトの伸びを考慮した場合にセカンダリプーリの推力が必要以上に高く設定されることを防止する。
【解決手段】本発明は、無段変速機の変速制御装置であって、駆動力伝達部材13の伸びによる各プーリ11、12の回転速度比の変化量を推定する回転速度比変化量推定手段S3と、入力トルクと回転速度比の変化量とに基づいて、伸び無しプーリ比を推定する伸び無しプーリ比推定手段S4と、入力トルクと伸び無しプーリ比とに基づいて、セカンダリ推力を演算するセカンダリ推力演算手段S5と、駆動力伝達部材13の伸びによるセカンダリプーリ12と駆動力伝達部材13との接触半径の変化量を推定する接触半径変化量推定手段S6と、セカンダリ推力を接触半径の変化量に基づいて補正し、補正後セカンダリ推力を演算する補正後セカンダリ推力演算手段S8と、補正後セカンダリ推力に基づいて推力を制御する推力制御手段S9と、を備える。
(もっと読む)
ハイブリッド駆動装置の制御装置
【課題】EV走行領域を縮小することなく、かつエンジン始動時に生じるヘジテーションの低減を図ることが可能なハイブリッド駆動装置の制御装置を提供する。
【解決手段】ハイブリッド駆動装置1は、変速機構3と、入力軸6に駆動連結されるモータ2と、エンジン9と入力軸6との間に介在するクラッチ4とを備えており、EV走行中におけるエンジン始動時には、クラッチ4を係合してエンジン9の回転上昇を行う。このハイブリッド駆動装置1の制御装置100に、エンジン始動時におけるクラッチ4の係合制御に合わせて、変速機構3をアップシフトしてイナーシャトルクを出力させる始動時アップシフト制御手段107を備え、エンジン始動時に、モータ2の駆動トルクTmにイナーシャトルクTiを加えた出力トルクToutを駆動車輪10に出力させることで、エンジン始動時に生じるヘジテーションの低減を図る。
(もっと読む)
無段変速機搭載車の制御装置
【課題】停車時、プーリー比を最ロー状態とするまでに要する時間の短縮化を図ることができると共に、停車時ロー変速制御中に再発進要求があった場合、再発進加速性を向上させること。
【解決手段】無段変速機搭載車の制御装置は、エンジン1と、ベルト式無段変速機構4と、前進クラッチ31と、停車判定手段(図2のステップS1)と、停車時ロー変速制御手段(図2)と、を備える。停車時ロー変速制御手段(図2)は、前進クラッチ31が締結されている動力伝達状態において、停車判定手段(ステップS1)により停車状態であると判定され、且つ、ベルト式無段変速機構4のプーリー比が最ロー領域でないとき、停車状態であると判定された時点のプーリー比よりもロー側に向けて変速する停車時ロー変速制御を開始する。
(もっと読む)
車両用無段変速機の制御装置
【課題】一方の側の実推力が異常に大きくなる故障が生じたとしても、その故障を検知することなくその故障に起因した急変速を防止する。
【解決手段】目標セカンダリ推力Wout*と実セカンダリ推力Woutとのうちで選択した大きい方の推力(最大セカンダリ推力Woutms)に基づいて算出される、変速制御の為に必要なプライマリプーリ側の推力であるプライマリプーリ側変速制御推力Winshが目標プライマリ推力Win*として設定されるので、実セカンダリ推力Woutが目標セカンダリ推力Wout*よりも異常に大きくなる故障が生じたとしても、その故障を検知することなくその故障に起因した急変速を防止することができる。つまり、上記制御を用いることで故障検知(フェール検知)そのものが不要になって誤判定も招くことなく、故障に起因した急変速を防止して、変速ショック等を抑制することができる。
(もっと読む)
トロイダル型無段変速機及び無段変速装置
【課題】急加速時等の動力の急変動時にも、この動力を伝達するトラクション部(転がり接触部)で適切な押し付け力を付与できる構造を実現する。
【解決手段】動力の急変動時は、押圧装置に導入すべき油圧の目標値を、アクセル開度とエンジン回転速度とに基づいて設定し、この目標値に油圧を調節する。
(もっと読む)
無段変速機の制御装置
【課題】油圧超過およびベルト滑りの発生を抑制する無段変速機の制御装置を提供する。
【解決手段】プライマリプーリ2と、セカンダリプーリ3と、プライマリプーリ2とセカンダリプーリ3とに巻き掛けられた動力伝達部材4とを有するバリエータ1と、トルクコンバータ6とを備える無段変速機30を制御する無段変速機の制御装置であって、トルクコンバータ6よりも駆動輪17側に位置する回転体15の回転速度を検出する回転速度検出手段12と、単位時間当たりの回転速度の変化量を算出する回転速度変化量算出手段12と、トルクコンバータ6の入力軸と出力軸との回転速度差が大きいほど、変化量のリミッタの絶対値を大きく設定するリミッタ設定手段12と、変化量とリミッタとのうち絶対値が小さい方の値を最終変化量として設定する最終変化量設定手段12と、最終変化量に基づいてバリエータ1に供給する油圧を制御する油圧制御手段12とを備える。
(もっと読む)
車両用変速装置
【課題】 簡単かつ低コストな構成でありながら、よりきめ細かく高精度かつ円滑に、1速ギヤやリバースギヤなどのシンクロ機構を備えない変速ギヤへの変速の際におけるギヤ鳴きの発生などを抑制して円滑な変速を実現可能な機械式自動変速機の変速制御装置を提供する。
【解決手段】 本発明は、常時噛み合い式の機械式自動変速機100の変速制御装置であって、シンクロ機構を全ての変速段のうちの一部に備えたものにおいて、シンクロ機構を備えない変速段(1速ギヤや後退ギヤ)への変速の際に、変速機の温度状態に基づいて、一旦シンクロ機構を備えた変速段(例えば2速ギヤ)へ変速してから該当の変速段へ変速する変速方法と、直接該当の変速段へ変速する変速方法と、を選択的に切り替えるように構成した。
(もっと読む)
CVTクランプ力制御方法
【課題】本発明は、別途の高性能センサなどの追加部品なしで、プーリとベルトとの間に作用する最適なクランプ力を探すことにより、CVTの効率向上および車両の燃費向上に寄与できるようにしたCVTクランプ力制御方法を提供することにある。
【解決手段】駆動プーリと従動プーリのうちのいずれか1つのクランプ力を固定する第1過程と、前記第1過程でクランプ力が固定されていない残りのプーリの現在クランプ力から順次クランプ力を下げながら変速比が最小になる区間を探し、前記変速比が最小になる区間でのクランプ力を前記固定されていない残りのプーリのクランプ力に設定する第2過程と、を含んで構成されることを特徴とする。
(もっと読む)
運転支援装置
【課題】運転支援装置に関し、周囲の走行環境の変化に応じた協調的な安定走行を実現する。
【解決手段】変速機19を搭載した車両の運転支援装置において、変速比に応じた駆動輪の最大トルクと、走行状態に応じて駆動輪に要求される要求トルクとを演算する演算手段3を設ける。
また、車両の周囲の他車両の走行状況を検出する検出手段2を設ける。
さらに、演算手段3で演算された最大トルク及び要求トルクと、検出手段2で検出された走行状況とに基づき、変速比の変更の要否を判定する判定手段4を設ける。
(もっと読む)
制御装置
【課題】変速機構の変速段を切り替える際に、回転電機及び内燃機関の双方により、入力部材の回転速度を変化させるためのトルクを出力させることができる制御装置の実現。
【解決手段】回転電機及び内燃機関を有する駆動力源に駆動連結される入力部材と、車輪に駆動連結される出力部材と、選択された変速段の変速比に応じて入力部材の回転速度を変速して出力部材に伝達する変速機構と、を備えた車両用駆動装置を制御するための制御装置であって、変速段を切り替える際に、入力部材の回転速度を変化させるために駆動力源に出力させるトルクの指令値である回転変化トルク指令値を算出し、回転電機に出力させるトルクの絶対値が所定のしきい値より大きくなると判定した場合は、回転電機及び内燃機関の双方により回転変化トルク指令値に応じたトルクを出力させる制御装置。
(もっと読む)
車両制御装置
【課題】手動変速機の同期装置の負荷を軽減することができる車両制御装置を提供すること。
【解決手段】エンジンと、入力軸と、出力軸と、入力軸の回転と出力軸の回転とを同期させる同期装置とを有する手動変速機と、エンジンと入力軸との間に配置され、操作入力によって係合あるいは解放するクラッチと、クラッチよりも入力軸側に動力を伝達可能なモータと、を備え、手動変速機が中立状態(S1肯定)でかつエンジンを停止して走行中に、クラッチが解放する(S2肯定)と、モータによって入力軸の回転数を手動変速機における最も変速比が小さな変速段に対応する回転数以上の回転数に制御する(S4)。
(もっと読む)
油圧制御装置
【課題】エンジンと変速装置との間の動力伝達を断接するクラッチの冷却性能を確保しつつ、オイルの消費を低減する油圧制御装置を提供する。
【解決手段】油圧制御装置は、クラッチを、解放状態と、摩擦板がスリップ回転するスリップ状態と、摩擦板が完全係合した完全係合状態と、になるように係合圧を制御可能なクラッチ制御部と、このクラッチの制御状態に基づいてクラッチハウジングの内部空間に供給されるオイル量を調整自在なオイル量調整部と、を有し、このオイル量調整部は、クラッチのスリップ開始時の供給オイル量を、解放時の第1供給オイル量よりも大きい第2供給オイル量に設定する。
(もっと読む)
作業車両の変速装置
【課題】電動モータ9を駆動源としながら伝動機構の部品数を極力少なくして機体重量が比較的軽量な作業車両の変速装置を提供すること。
【解決手段】駆動軸11aに駆動力を供給すると共に、前進・後進・停止及び加減速を行なうために設けた駆動モータ9から駆動力を受けて駆動する油圧式無段変速装置(HST)23からなる作業車両の変速装置であって、変速装置23はモータ9により駆動される入力軸80と入力側傾斜板82とシリンダ84aを内装した入力側シリンダブロック84とレバー16により傾動角度が決められる傾斜板82の傾動角度に応じて、シリンダ84aからの油圧を受ける油圧閉回路を有するポートブロック85と該油圧閉回路からの油圧を受けるシリンダ86aを内装した出力側シリンダブロック86とシリンダ86aからの油圧を受ける出力側傾斜板88と該板88と一体の出力軸81とを有する。
(もっと読む)
車両のコーストニュートラル制御装置
【課題】コースト走行時、ニュートラル制御中の燃費向上と、加速要求に対する応答性確保と、の両立を達成すること。
【解決手段】車両のコーストニュートラル制御装置は、エンジン1の駆動力が伝達されるトルクコンバータ2と、トルクコンバータ2と駆動輪6,6との間に配置される前進クラッチ31と、走行中、摩擦要素解放条件が成立すると前進クラッチ31を解放状態とするコーストニュートラル制御手段を備える。コーストニュートラル制御手段(図5)は、前進クラッチ31の解放後、前進クラッチ31がトルク容量を発生し始める油圧を、トルクコンバータ2の入出力回転速度差(Ne−Nt)と閾値とから検知するトルク発生油圧検知手段と、検知されたトルク発生油圧に基づいて、前進クラッチ31に供給する油圧を制御する摩擦要素圧制御手段と、閾値を車速または車速に相当する値に応じて変更する閾値変更手段と、を有する。
(もっと読む)
無段変速機の変速制御装置及び制御方法
【課題】無端トルク伝達部材の伸びの有無に応じた、適正なプーリ推力制御を実現する。
【解決手段】無段変速機4は一対のプーリ11と12に掛け回された無端トルク伝達部材13を備え、少なくとも一方のプーリは加えられるプーリ推力に応じて、無端トルク伝達部材13の巻き付け径を変化させる。変速制御装置は無段変速機4の運転状態に基づき無端トルク伝達部材13の伸び量を推定し、伸び量に基づき滑り限界推力を設定し、滑り限界推力に基づき少なくとも一方のプーリ推力を制御する。
(もっと読む)
車両制御装置
【課題】変速機の同期装置に関して学習を行う機会を適切に確保できる車両制御装置を提供すること。
【解決手段】入力軸2Aの回転をそれぞれ異なる変速比で出力軸2Bに伝達する複数のギヤ対21,22,23,24と、いずれかのギヤ対に選択的に係合して入力軸の回転と出力軸の回転とを同期させる制御可能な同期装置40と、を有する常時噛合い式の変速機2と、入力軸に接続された第一動力源1と、出力軸に接続された第二動力源3とを備え、第一動力源の動力によらずに第二動力源の動力によって車両を走行させる所定走行時に、同期装置によって入力軸の回転と出力軸の回転とを同期させるときの動力伝達の開始点について学習制御を行う。
(もっと読む)
円錐摩擦車リング式無段変速装置の変速制御装置
【課題】リングの軸方向位置を検知するセンサをなくすと共に、リングが正常可動範囲を越えるような信号が出力することを防止する。
【解決手段】インプットコーン回転数,入力トルク,トラクション油温に基づきリングのスリップ率を求めて、実変速比から求めたリング軸方向位置を上記スリップ率により補正して、リングの軸方向位置を推定する。該推定したリングの軸方向位置と、目標速度比から算出したリングの軸方向位置とにより、リングのステア角を算出する。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、内燃機関トルクを利用して、電動機に電気エネルギを供給するためのバッテリを効率良く充電すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。シフト位置が「ニュートラル」にあり、摩擦クラッチが接合状態にあり、アクセル開度が「0」であり、バッテリ残量SOCが閾値TH未満である場合に充電条件が成立する。充電条件が成立すると、EGトルクを利用したバッテリの充電が行われる。具体的には、EGトルクを利用してMGが発電機として駆動され、MGの発電により得られた電気エネルギを利用してバッテリが充電される。
(もっと読む)
ギア変換のための方法および伝動装置配置構造物
【課題】本発明は、液圧伝動装置およびその下流に連結した手動ギアボックス(4)を有する伝動装置においてギアを変換するための、方法および伝動装置配置構造物に関するものである。
【解決手段】最初に、液圧モータ(9)の出力トルクが減少させられる。液圧モータ(9)の出力トルクの減少の後、下流で連結していた、手動ギアボックス(4)の係合していたギア(12、13)の係合が外される。係合しようとしているギア(13、12)に相当する、液圧モータ(9)の出力回転速度が決定される。次に、液圧伝動装置の歯数比を調節し、液圧モータ(9)の出力回転速度が、決定された相当出力回転速度より高くなるようにする。この増加させられた出力回転速度に到達した後、係合しようとしていたギア(13、12)を係合する。
(もっと読む)
81 - 100 / 1,352
[ Back to top ]