
Fターム[4C097BB07]の内容
補綴 (46,288) | 技術の対象 (7,442) | 補綴;代替物の操作又は制御 (715) | 生体内因子による制御 (110)
Fターム[4C097BB07]に分類される特許
1 - 20 / 110
装着式動作補助装置

【課題】本発明は両腕で運搬物を抱えながら安定的に移動できることを課題とする。
【解決手段】動作補助装置10は、装着者12の上肢に装着される上肢フレーム14と、装着者12の下肢に装着される下肢フレーム19と、装着者12の腰に装着される腰フレーム30と有する。上肢フレーム14は、腰フレーム30の上方に形成され、腰フレーム30の前側より上方に延在する垂直フレーム15と、垂直フレーム15の上端より肩幅方向に横架された肩フレーム16A、16Bとを有する。肩フレーム16A、16Bには、運搬物を持ち上げる際に両腕の動作をアシストする上肢駆動部17A,17Bが前後方向に回動可能に設けられている。従って、肩フレーム16A、16Bに支持される上肢駆動部17A,17Bの質量は、上肢フレーム14に支持されるため、装着者12には上肢フレーム14及び上肢駆動部17A,17Bの重さを感じることなく、作業が行える。
(もっと読む)
装着式動作補助装置

【課題】装着者の負担を軽減して作業効率を高める装着式動作補助装置を提供する。
【解決手段】装着者12は、装着式動作補助装置10が装着された状態で防護服14及び頭部保護具16を装着する。動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
(もっと読む)
伸縮駆動素子
【課題】変形に対する抵抗が少ない電極を有するアクチュエーターを提供する。
【解決手段】伸縮可能な筒状の第1の部位と、第1の電極と、第2の電極と、高分子電解質層と、を含み、前記第1の部位の内部は、前記高分子電解質層で埋められており、前記第1の電極は、前記第1の部位の周囲に接して螺旋状に配置され、前記第2の電極は、前記高分子電解質層の内部に埋められ、前記第1の部位の伸縮に伴い変形することを特徴とする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の歩行支援に際して装着者に与える違和感を低減する。
【解決手段】本実施の形態では、歩容が変化する場合の一例として、装着型ロボット1の装着者がエスカレータ300に乗る場合を考える。装着者は、エスカレータ300に乗ると、踏板上に立つか、歩くかして歩容が変化するが、エスカレータ300を降りた後は、乗る前と同様の歩き方をすると考えられる。そこで、装着型ロボット1は、エスカレータ300に乗る前に装着者の歩行を支援しつつ、歩行情報を検出してアーカイブに記憶しておき、装着者がエスカレータ300から降りて再び歩き始める際に当該歩行情報を用いて歩行支援を行う。装着型ロボット1は、この制御方法により、装着者がエスカレータ300を降りて歩く際の歩容を推定して先回りして制御するため、装着者に与える違和感を低減することができる。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制する。
【解決手段】装着式動作補助装置1は、複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる動作補助装着具10を備えるとともに、動作補助装着具10による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える。
(もっと読む)
行動識別装置
【課題】日常生活に支障のない身体の部位から検知された生体情報に基づいて使用者の行動を識別することができる行動識別装置を提供する。
【解決手段】使用者の額に装着された生体電極1により検知された生体信号は生体信号取得部2により取得され、前処理部4はその生体信号から周波数に基づいて分離した被識別データを生成する。行動識別部10は被識別データに基づいて使用者の行動を識別する。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
上肢運動モデル
【課題】応答性能を向上させることができ、比較的急速な運動であっても良好な再現性が得られ、上肢の動作特性を十分に表現することができる上肢運動モデルを提供する。
【解決手段】所定の回転軸を中心に回転する目標指針に、該目標指針と同軸回転するリンクを追従させる位置決め操作にともなう人間の上肢の動作をモデル化した上肢運動モデルであって、目・脳モデル化部13と、上肢モデル化部14と、インターフェイスモデル化部12とを備え、目・脳モデル化部13に誤差補償感度係数βにより調整されるフィードフォワード項を有し、上肢モデル化部14に力覚フィードバック結合特性α(s)によるフィードバック項を有することで、視覚・力覚混合型フィードバックモデルとして構成される。
(もっと読む)
神経インタフェースをホスト神経系と接続するためのバイオハイブリッド型インプラント
【課題】電子回路を人体の活性細胞(例えば、ニューロン)とインタフェース接続するのに適したデバイスを提供する。
【解決手段】細胞を記録及び/又は刺激するのに適したバイオハイブリッド型インプラントは、ニューロンを電子回路と接続するための神経インタフェース(13)を備えた基板(502)を収容した、少なくとも1つの閉じた隔離されたチャンバ(1)と、隔離されたチャンバ(1)の少なくとも1つと接続するための第1インタフェース(11)および、ホスト神経系(7)または他の隔離されたチャンバ(B)と接続するための第2インタフェース(9)を有する、少なくとも1つの可撓性ガイドチャネル(10)とを備える。
(もっと読む)
洞係合固定部材
操作された神経支配組織を生成する方法およびその使用
本発明は、操作された神経支配組織の関連するインビトロモデルを生成するための方法、ならびにこのような組織の使用を提供する。一実施形態において、操作された神経支配組織を調製するための方法が提供され、この方法は:パターン化バイオポリマーを含む固体支持構造体を提供する工程;未成熟細胞を該パターン化バイオポリマーに播種する工程;異方性組織が形成されるように、該細胞を培養する工程;該異方性組織にニューロンを播種する工程;および該ニューロンを播種した該異方性組織を培養して、神経ネットワークが埋め込まれた異方性組織を形成し、それによって、操作された神経支配組織を調製する工程を包含する。 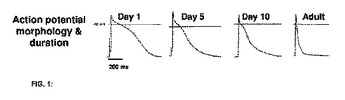 (もっと読む)
(もっと読む)
筋電位測定義手用アームカバー
【課題】筋電位を確実に測定することができ、身体の動きに追従する柔軟性を有すると共に、検出電極部に接続する配線が所定の位置から離脱して露出するようなことがない筋電位測定義手用アームカバーの提供。
【解決手段】筋電位を測定する検出電極部3と、該検出電極部3からの信号を伝送する配線2と、該配線2を織り込んだテキスタイル1とが少なくとも備えられたことを特徴とする筋電位測定義手用アームカバー10。
(もっと読む)
医学的使用のための注射用ヒドロゲル繊維
構造体および形成異常を、拡張の遅延した制御速度を有し、上記構造体もしくは形成異常の中に一旦入るとデバイスの位置変更を可能にする放射線不透過性ヒドロゲル繊維で閉塞するための装置、組成物、システムおよび関連する方法が本明細書で記載される。さらに、二官能性の、低分子量のエチレン性不飽和の成形可能なマクロマー;エチレン性不飽和のモノマー;および放射線不透過性要素を含む動物における移植用デバイスが記載され、ここで上記デバイスは、支持部材を含まない。このようなデバイスを形成するための方法もまた、開示される。  (もっと読む)
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は生体信号の検出感度に応じたパラメータに補正することを課題とする。
【解決手段】動作補助装置10のキャリブレーション制御手段162は、装着者12が動作補助装着具を装着したときに、負荷発生手段164により電力増幅手段158に対して駆動源140からの駆動力を負荷(入力トルク)として装着者12に付与させる。そして、駆動源140からの駆動力を付与された装着者12は、予め決められた所定キャリブレーション動作を行って骨格筋から力を発生させる。これにより、上記キャリブレーション動作に伴って物理現象検出手段142が関節角度を検出し、生体信号検出手段144が筋電位信号を検出する。パラメータ補正手段156では、フェーズ特定手段152によって特定されたフェーズにおける差分導出手段154によって算出された負荷(入力トルク)と駆動力(筋力)との差に基づいてパラメータKを補正する。
(もっと読む)
心臓病態を治療するための補助及びリコイル機能を備える二相性及び動的調整可能サポートデバイス及び方法
本発明は、心臓の拡張期リコイルを改善するための方法及び直接心臓接触拡張期リコイルデバイスを提供し、並びに、心臓攣縮期に弾性エネルギーを貯蔵し心臓充満期にエネルギーを放出する1若しくは2以上の構造要素に取り付けられた、又は前記構造要素を封入する生体適合フィルムを含む。  (もっと読む)
(もっと読む)
心臓病態を治療するための補助及びリコイル機能を備える二相性及び動的調整可能サポートデバイス及び方法
本発明は、鬱血性心不全及び関連する心臓病態に罹患している患者に移植されるように適合した直接心臓接触デバイスであって、心室補助、心室サポート及び拡張期リコイルを提供する、又は心室サポート及び拡張期リコイルのみを提供する手段を有する心臓デバイスを提供する。  (もっと読む)
(もっと読む)
調節性IOLを制御するための生理的な信号の電気的な増幅
調節性眼内レンズのための制御システム(100)は、眼の毛様体筋を制御する信号を感知するための感知回路(110)と、感知された信号を増幅するための増幅回路(130)とを含む。増幅回路の出力は、調節性IOLを制御するのに使用される。第三脳神経、毛様体神経節、又は毛様体筋の付近に配設された少なくとも一つの電極は、毛様体筋を制御する信号を受信するのに使用される。フィルターが含まれてもよい。 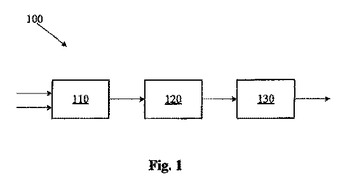 (もっと読む)
(もっと読む)
装着補助具
【課題】本発明は、装着式動作補助装置の駆動部からの補助動力が装着者に締結される締結部材を介して伝達される際に締結部材が装着者の服に対して滑ることを防止することを課題とする。
【解決手段】装着補助具200は、密着層210と、弾性層220と、動力伝達層230と、摩擦層240とを一体的に積層したものである。各層間は、縫合または接着または溶着などの接合方法を用いて結合される。弾性層220は、密着層210を装着者の被駆動部位に締付けると共に、装着式動作補助装置の補助動力が増大した場合には密着層210と動力伝達層230との間の補助動力の伝達を緩衝するように弾性変形する。これにより、装着式動作補助装置の補助動力(モータトルク)が過大になった場合には、弾性層220の緩衝により装着者12が被着した服の表面に対して密着層210が滑らないように伝達トルクが緩和される。
(もっと読む)
動作補助装置、及び該動作補助装置を管理する情報管理装置
【課題】動作補助装置の使用状況を効率よく管理し、最適な状態を維持する。
【解決手段】動作補助装置において、装着者の関節の角度を検出する第1の検出手段と、装着者の筋活動に伴う生体信号を検出する第2の検出手段と、駆動源の駆動トルクを検出する第3の検出手段と、基準パラメータデータベース、指令信号データベース、及び前記第1から第3の検出手段の検出信号からなる動作履歴情報が格納される格納手段と、前記動作履歴情報を管理者側に送信し、前記管理者側からの前記基準パラメータ及び/又は指令信号を受信する通信手段と、前記更新情報の該当するフェーズに対応させて更新情報を格納する更新制御手段と、関節角度信号と、基準パラメータとを比較することにより、前記装着者の動作のフェーズを推定し、推定されたフェーズに対応する指令信号に基づいて、前記駆動源を駆動する制御手段を備えることにより、上記課題を解決する。
(もっと読む)
体内埋め込み装置
【課題】患者にかかる負担を軽減しつつ、長期間にわたって電池寿命を維持する。
【解決手段】心臓または心膜に固定される電極2と、該電極2に電気的に接続され、該電極2に対して電力を供給する外部装置3とを備え、電極2に、心臓の拍動に伴う変形による圧電効果によって発電する発電素子4が備えられ、外部装置3に、発電素子4により発電された電力を蓄える蓄電手段12が設けられている体内埋め込み装置1を提供する。
(もっと読む)
1 - 20 / 110
[ Back to top ]