
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
101 - 120 / 2,648
移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法
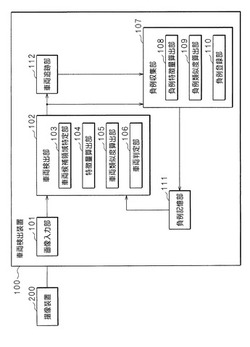
【課題】人手を介さずに非車両パターンの収集を自動的に行うとともに収集した非車両パターンを用いて車両などの移動体を高精度に検出することができる移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】負例特徴量算出部108は、時刻tから所定時間Ts経過後の時刻(t+Ts)での撮像画像上で時刻tでの撮像画像上で特定された移動体候補領域の対応領域の画素値に基づく特徴量を算出する。負例類似度算出部109は、移動体候補領域の特徴量と対応領域の特徴量との類似度を算出する。負例登録部110は、算出した類似度が所定の閾値S以上である場合、移動体候補領域を非車両パターンとして登録する。
(もっと読む)
接近障害物検出装置及びプログラム

【課題】光源が自車両に接近することを検出して警告する接近障害物検出装置を提供する。
【解決手段】路面反射した光が、光源を起点として、撮影カメラの方向に延びる縦長の楕円形に類する形状を有することに着目して、路面湿潤時に自車両周辺を撮影した画像より、高輝度領域追跡部25が特定の形状からなる高輝度領域の位置及び動きの時間的な変化を検出する。そして、光源接近判定部29は、撮影画像において縦長楕円形で現れる路面反射部分の時間的な移動方向をもとに、自車両に接近してくる光源(自車方向に接近する障害物)を検出する。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
情報表示装置及び情報表示方法
【課題】特定の運転者のみに情報を伝達すること。
【解決手段】第1領域において所定周波数の逆数の時間間隔で点滅し、第1領域を包含する第2領域のうち第1領域以外の領域において所定周波数の2の階乗倍である周波数の逆数の時間間隔で点滅する複数の発光素子を有する情報表示板100を含む画像を取得し、第1領域に示される情報を表示する情報表示装置200であって、撮像間隔設定部201は車両情報が所定条件を満たす場合は撮像間隔を所定周波数の2倍の逆数に設定し、所定条件を満たさない場合は撮像間隔を所定周波数の逆数に設定し、撮像制御部202は設定された撮像間隔に基づいて撮像タイミングが制御された車載カメラ300から情報表示板100を含む画像を取得し、差分画像生成部206は第1画像と、第1画像に対して撮像間隔だけ前に撮像された第2画像との間の情報表示板100の差分画像を生成し、表示部207は差分画像を表示する。
(もっと読む)
車両監視装置
【課題】車両監視装置の設置および設置後の位置調整を簡易に行うことのできる車両監視装置を提供する。
【解決手段】走行する車両を監視カメラで撮影し、撮影した画像を解析して前記車両の登録番号あるいは車色を取得する車両監視装置において、前記画像のエッジを検出し、該エッジの傾きから前記監視カメラの傾きを検出する傾き検出部と、前記画像内のナンバープレートの幅を認識し、該認識した幅と前記画像の幅をもとに前記カメラの視野幅を検出する視野幅検出部を備えた画像処理装置を備え、該画像処理装置は、検出した監視カメラの傾きおよび視野幅をもとに、前記監視カメラの傾き、およびカメラと監視対象車両位置との間隔の適否を判定し、否と判定したときその調整方向を指示する情報を表示装置に表示する判定部を備えた。
(もっと読む)
周囲環境認識装置
【課題】車両周囲の環境認識精度を向上させる。
【解決手段】障害物認識処理部4は、撮像した撮像画像及び地図情報の少なくとも一方に基づき、自車MM周囲に存在し且つ光を透過及び反射の少なくとも一方の作用を有する反射物体を推定する。そして、障害物認識処理部4は、推定した反射物体を参照しつつ、撮像した撮像画像から自車MMの周囲の物体を認識する。
(もっと読む)
移動体検出装置、移動体検出システム及びコンピュータプログラム
【課題】従来よりもさらに精度良く移動体を検出することができる移動体検出装置、移動体検出システム及びコンピュータプログラムを提供する。
【解決手段】鳥瞰画像生成部103は、透視変換行列を用いて撮像画像を複数の画素で構成される鳥瞰画像に変換する。移動体候補領域抽出部104は、鳥瞰画像の画素値に基づいて、鳥瞰画像上で移動体候補領域を抽出する。移動体検出部107は、抽出された移動体候補領域の境界の近傍で列状をなす列状画素それぞれの位置から所定の向きで走査した所定数の画素のうち、移動体候補領域内に含まれる画素数に基づいて、列状画素を移動体の一部として検出する。
(もっと読む)
車両周辺監視システム
【課題】各撮影画像から構成される車両周辺俯瞰画像において俯瞰画像セグメントの重複領域に現れる物体に対する運転者の視認性を改善する。
【解決手段】俯瞰画像セグメントの重複領域を予め設定された融合関数で融合して融合重複画像が生成される。融合関数は、重ね合わされる一方の撮影画像の撮影視野限界線と他方の撮影画像の撮影視野限界線との交点である基準点周りの角度に基づいて、または、一方の撮影画像の撮影視野限界線からの距離である第1パラメータと他方の撮影画像の撮影視野限界線からの距離である第2パラメータとに基づいて、あるいは、一方の撮影画像の撮影点と他方の撮影画像の撮影点とからの離散度に基づいて、重複領域における一方の撮影画像の画素成分と他方の撮影画像の画素成分との融合割合を導出する。
(もっと読む)
車両検出装置、車両検出システム及びコンピュータプログラム
【課題】輝度変化が少ない場合でも精度よく所定の警告灯を点滅している車両の検出を行うことができる車両検出装置、車両検出システム及びコンピュータプログラムを提供する。
【解決手段】時間差分画像生成部103は、撮像時点が異なる複数の撮像画像の画素値の差分に基づいて時間差分画像を時系列に複数生成する。一致・不一致判定部107は、時間差分画像生成部103で生成した時間差分画像のうちの直近の時間差分画像と他の時間差分画像との所定の画素ブロックの一致/不一致を判定する。車両検出部108は、一致/不一致判定部107で判定した一致/不一致の遷移回数に基づいて車両を検出する。
(もっと読む)
駐車枠の認識装置、駐車枠の認識方法、及び、プログラム
【課題】駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とし、駐車枠の認識が可能な駐車場を増やして有効に駐車枠を認識する。
【解決手段】駐車枠の認識装置2が、複数の駐車枠の形状のいずれかをユーザの操作に基づいて選択する。そして、選択した駐車枠の形状に基づいて、車両外部を示す画像中の駐車枠12を認識する。駐車枠の認識装置2が駐車枠12を認識すると、駐車支援システム100は駐車枠12で区画される駐車領域PAへ車両1を誘導し、駐車支援を行う。したがって、駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とすることができる。かかる通信設備を不要とすることにより、駐車枠の認識が可能な駐車場を増やし、有効に駐車枠を認識することができる。
(もっと読む)
車両用外界認識装置及びそれを用いた車両制御システム
【課題】例えば薄暮のように昼間と照明条件が異なるシーンにおいて先行車両を正しく検出することができる車両用外界認識装置を提供する。
【解決手段】車両外形を検出するとともに、車両尾灯を検出し、車両外形と車両尾灯が同期して動いているものを車両と判定する。
(もっと読む)
車両周辺監視装置
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
車両周囲画像撮像システム
【課題】車両周囲画像撮像システムにおいて、高性能な演算処理装置を必要とせず、かつ適正に周囲画像を補正する。
【解決手段】カメラ傾斜角センサ20(第1の検出器)によって検出されたカメラ10の傾き角度αiと車両傾斜角センサ40(第2の検出器)によって検出された車両200の傾き角度βとの差γi(傾き角度差分値)が、予め設定された基準値Γi(初期値や設計値等)から変化したときは、その変化量Δγi(ずれ量)に応じて俯瞰画像(周囲画像)の補正を行うものであり、差γiを算出する演算処理は軽負荷であるため高性能な演算処理装置を必要とせず、また、カメラ10の傾き角度αiの変化のみに応じて俯瞰画像の補正を行うのではなく、車両200の傾き角度βとの相対的な関係γiの変化に応じて補正を行うため、適正に俯瞰画像を補正する。
(もっと読む)
リアビューカメラ用目安線登録重畳装置
【課題】リアビューカメラで表示する車両後方の画像に重畳する目安線の登録を簡便に行
う。
【解決手段】車両停止位置設定部150によって、床面や路面に表示された目安線と所定
の相対関係をなす位置に車両10を停止させ、撮像部20で撮影した目安線を含む画像の
中から目安線抽出部40で目安線を示す領域を抽出し、抽出した領域の形状と階調値を目
安線補正部50で補正して、目安線記憶部60に登録する。
(もっと読む)
瞼検出装置、瞼検出方法及びプログラム
【課題】ドライバの瞼を正確に検出する。
【解決手段】ドライバの顔が写る画像から検出され、ペアリングされたエッジ同士の距離dを順次算出する。そして、算出した距離dの変化に基づいて、瞼のエッジのペアとしての確度が低い候補を除外していき、最終的に残ったエッジのペアを、上瞼のエッジと下瞼のエッジのペアとして検出する(S208)。このため、瞼のエッジに近い特徴だけでなく、瞼としての振る舞いを考慮した検出を行うことができる。したがって、ドライバの瞼のエッジを、正確に検出することが可能となる。
(もっと読む)
画像処理による渡り線測定装置
【課題】渡り線と背景の切り分けを高精度に行うことが可能な画像処理による渡り線測定装置を提供する。
【解決手段】車両の屋根上に設置されたラインセンサカメラ2と、車両の内部に設置された計測用コンピュータ3とを備えた画像処理による渡り線測定装置において、計測用コンピュータ3が、ラインセンサ画像作成部3aと、標準偏差背景除去処理部3bと、判別分析二値化処理部3cと、ノイズ除去処理部3dと、渡り線部エッジ検出部3eと、渡り線部高さ計算部3fと、渡り線部偏位計算部3gとを備えるようにし、ラインセンサ画像に対して標準偏差背景除去処理を行ったうえで二値化処理を行うことにより渡り線と背景との切り分けを行うようにした。
(もっと読む)
走行場面認識モデル生成装置、運転支援装置、及びプログラム
【課題】予め認識したい物体が特定されていない場合においても、運転に必要な情報を残したまま、走行場面を圧縮する。
【解決手段】視線先画像抽出部34で、ドライバの視線方向に基づいて視線先画像を抽出し、特徴量A抽出部36で、視線先画像から特徴量リストAを生成し、特徴量B抽出部38で、外観環境画像全体から特徴量リストBを生成し、特徴量DB40に蓄積する。クラスタDB構築部42で、特徴量リストAをクラスタリングし、各クラスタの代表ベクトルをクラスタDB44に格納する。クラスタ別重みDB構築部46で、各クラスタにおける特徴量リストAの出現確率と特徴量リストBの出現確率との比に基づいて、クラスタ毎の重みを算出し、クラスタ別重みDB48に格納する。場面認識部52で、クラスタ毎の重みが閾値以上のクラスタに対する特徴量リストCのクラスタ別の出現頻度ヒストグラムを算出し、走行場面として認識する。
(もっと読む)
車両用画像認識装置
【課題】本発明は、車両用画像認識装置に係り、自車両の発進時に自車両の移動を伴うことなく単一のカメラを用いて自車両周辺の状態を判定することにある。
【解決手段】自車両周辺を撮影するカメラと、自車両停車時における自車両周辺の停車時状態(具体的には、自車両停車時におけるカメラの撮像画像、及び、自車両停車時にカメラが撮影する方向に存在する障害物の有無及び位置)を示す情報を記憶手段に記憶させる停車時記憶制御手段と、自車両発進時、カメラの撮像画像と記憶手段に情報記憶されている停車時状態とに基づいて、自車両周辺の状態を判定する状態判定手段と、を設ける。
(もっと読む)
車載白線認識装置
【課題】 制御対象とすべき白線を適切に選択できる車載白線認識装置を提供する。
【解決手段】 複合線判定部70は、白線特徴統合部60にて出力された尤度が所定の閾値以上である白線候補それぞれに対して複数のテンプレートによるパターンマッチングを行い、また、白線候補抽出部30によるハフ変換の投票数に応じて破線のピッチを判定して、それらの結果に基づいて、様々な線種類に対して、ある白線がその線種類である確からしさを示すパラメータをまとめた確信度分布を出力し、当該白線の線種類を判別する。制御対象白線選択部80は、複合線を構成する短い破線を除いて車両に最も近い白線を制御対象の白線として選択する。
(もっと読む)
車両周辺監視装置
【課題】障害物が検出された検出領域について走査を省略することで処理負荷を削減することを目的とする。
【解決手段】車両周辺監視装置は、カメラの映像信号を入力する映像入力手段11と、入力画像についてパターンマッチング処理によって障害物を検出する走査を行う障害物検出手段12と、障害物検出手段12の走査方法を制御する走査制御手段13とを備え、走査制御手段13は、障害物検出手段12が障害物を検出した場合にその検出領域について走査を省略することを特徴とする。
(もっと読む)
101 - 120 / 2,648
[ Back to top ]