
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
161 - 180 / 2,648
画像処理装置
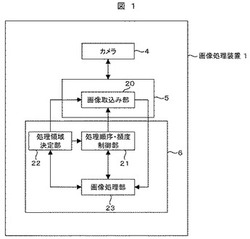
【課題】全ての認識対象に対して画像認識処理を実施でき、且つ画像の取り込みや転送の負荷を軽減できる画像処理装置を提供する。
【解決手段】撮像素子にて撮像された画像情報を取り込む画像取込み部と、画像情報に対して、複数の処理領域を設定する処理領域設定部と、設定された複数の処理領域の各画像情報の取り込む順番,頻度、及びタイミングのいずれか少なくとも1つ、及び各画像情報の処理の順序,頻度、及びタイミングのいずれか少なくとも1つを決定する処理順序頻度決定部と、決定された順番,頻度,タイミングで処理領域毎に画像情報を取り込み、取り込んだ画像情報を決定された順序,頻度,タイミングで画像処理を行う画像処理部と、を有する。
(もっと読む)
車両用画像処理装置

【課題】画像のダイナミックレンジが大きく、白線等の道路設置物や灯火を確実に検出可能な車両用画像処理装置を提供すること。
【解決手段】第1の撮像手段3と、第2の撮像手段5と、前記第1の撮像手段3及び前記第2の撮像手段5の露出制御を、道路設置物・灯火認識用露出制御と、立体物認識用露出制御との間で切り替える切り替え手段7と、前記第1の撮像手段3及び前記第2の撮像手段5により撮像された画像から前記道路設置物、灯火又は前記立体物を検出する検出手段7と、を備え、前記道路設置物・灯火認識用露出制御において、前記第1の撮像手段3の露出と、前記第2の撮像手段5の露出とが異なることを特徴とする車両用画像処理装置1。
(もっと読む)
車両用表示装置
【課題】簡素な構成を維持しつつ、検出対象物の画像に強調画像を的確に重畳させられる車両用表示装置の提供。
【解決手段】車両の前方領域90を撮影する近赤外線カメラ10によって順次生成される前方画像50から、歩行者画像70像を検出し、前方領域90を前方画像50に重畳して順次表示する車両用表示装置100である。車両用表示装置100は、近赤外線カメラ10から画像取得部21によって前方画像50を順次取得し、歩行者検出部23によって前方画像50から歩行者画像70の位置情報及び大きさ情報を抽出する。そして、速度情報取得部25によって取得する車両の走行速度が速くなるに従って、強調画像60のサイズは、大きさ情報に対応する基準サイズに対して大きく拡大される。拡大して描画された強調画像60は、現在の前方画像50nおいて位置情報に対応する位置CPに、重畳される。
(もっと読む)
画像処理装置
【課題】ベイヤー配列をした単板式の撮像素子を用いても、偽色を低減し、対象物の誤検知を抑止可能な画像処理装置を提供することである。
【解決手段】複数の色のカラーフィルタが所定の配列となるように画素に対して設けられた撮像素子から各画素が単色の色情報しか持たない複数の画素からなる画像(RAW画像)を取得する画像取得手段と、取得した画像から全画素の輝度を算出し、算出した輝度が予め定めた輝度以上となる光点領域を検出する光点領域検出手段と、光点領域内の同色画素毎に輝度の平均値を算出する平均値算出手段と、を有する。
(もっと読む)
運転支援装置
【課題】運転支援装置において、オプティカルフロー検出等の画像処理機能を向上することにある。
【解決手段】画像処理手段(5)は、広角レンズ(3)を有する撮像手段(4)により撮像される画像上の各画素の座標に対応するイメージプレーン上の各画素の座標を記録した記録手段(8)と、撮像手段(4)により撮像された画像上の画素位置から記録手段(8)に記録された座標の対応関係に基づいてイメージプレーン上の画素位置を取得する画素位置取得手段(9)とを備える。
(もっと読む)
物体検出方法、物体検出装置および物体検出プログラム
【課題】昼夜の時間帯や天候などの環境変動に如何に関わらず、道路上の落下物を高精度で検出することが可能な物体検出装置を提供する。
【解決手段】検出波長が互いに異なる第1,第2カメラにより撮影した画像をそれぞれの取得画像として取得する第1,第2画像取得手段1,5と、各前記取得画像から道路上の物体の存在を判定する第1,第2物体存在判定手段2,6と、各前記取得画像から道路上の物体の移動状態を検出し、静止物体と移動物体とを判別する第1,第2移動体検出手段3,7と、各前記取得画像から道路上の物体の立体情報を算出する第1,第2立体情報算出手段4,8と、第1,第2物体存在判定手段2,6、第1,第2移動体検出手段3,7、第1,第2立体情報算出手段4,8それぞれにおける処理結果を統合する特徴量統合手段9と、特徴量統合手段9における処理結果の特徴量により落下物の判定を行う落下物判定手段10と、を少なくとも備える。
(もっと読む)
路面状態検出装置、路面状態検出方法、及び路面状態検出プログラム
【課題】正しく路面の勾配を検出することができる路面状態検出装置、路面状態検出方法、及び路面状態検出プログラムを提供する。
【解決手段】画像取得部は画像を取得し、区分線認識部は前記取得した画像から路面に表された1つの車線の左側を区分する区分線と当該車線の右側を区分する区分線を抽出し、路面状態判定部は前記左側を区分する区分線の方向と前記右側を区分する区分線の方向に基づき、前記路面の勾配の変化を表す勾配情報を判定する。
(もっと読む)
対象物追跡装置および対象物追跡システム
【課題】撮像画像中の対象物の追跡をより確実に行うことを可能にする。
【解決手段】テンプレートマッチングが成功して先行車両の追跡が継続されるごとに、新規追跡画像を重ねて合成していくことで新たに合成画像を生成していくとともに、新たに合成画像を生成する場合には、過去合成画像に追跡の継続回数に応じた重みを付けながら、新規追跡画像を重ねてさらに合成していく画像重畳合成部25と、画像重畳合成部25で生成された合成画像に対してエッジ検出を行って、先行車両の端部の位置を決定する車両端決定部27と、車両端決定部27で決定した端部の位置をもとに、テンプレートを更新するテンプレート更新部28とを備え、テンプレートを更新した場合は、更新後のテンプレートとのテンプレートマッチングを繰り返すことで先行車両の追跡を行う。
(もっと読む)
手の判定方法、手の判定装置および自動車における車載機器の操作装置
【課題】 操作者の手およびステアリングハンドルを白・黒に的確に2値化して手の判定精度を高める。
【解決手段】 第1工程で、マークM1が手Hで隠されたときのステアリングハンドルSの所定領域RC,RL,RRの明度ヒストグラムを作成し、第2工程で、明度ヒストグラムの二つの山部の間に白・黒を判定する明度の閾値を設定し、第3工程で、閾値よりも明度が高い領域を白の領域であると判定する。よってステアリングハンドルSの明度に対して手Hの明度が相対的に高ければ、ステアリングハンドルSを黒に、且つ手Hを白に確実に2値化できる適切な閾値を設定することができ、白の領域を手Hであると判定することで判定精度を大幅に高めることが可能となる。
(もっと読む)
異物検知装置
【課題】低SNR環境下でも、異物を正確に検知することができる異物検知装置を得ることを目的とする。
【解決手段】三次元画像の縦方向成分が同一の画素単位に、異物の検知処理を開始する前に三次元画像撮像装置1から出力された各画素の反射強度値Ii,jの中で、最大の反射強度値Iimaxと最小の反射強度値Iiminを取得して、最大の反射強度値Iimaxを上限閾値THUPに設定するとともに、最小の反射強度値Iiminを下限閾値THLOWに設定する閾値設定部11を設ける。
(もっと読む)
コンクリート表面の閉合ひび割れ検出方法
【課題】コンクリート表面を撮像した元画像データを画像処理して閉合ひび割れを自動的に抽出する。
【解決手段】上下左右の矩形の処理領域を一般的に想定される閉合ひび割れのサイズをカバーする面積だけオーバーラップするように分割した複数の矩形の処理領域の元画像に対して画像処理を行い、撮影解像度以上のサブピクセル精度でひび割れ線分を抽出し、領域解析により一定以下の面積の微粒子を除去し、近接する線分同士を連結して閉合領域を生成する。全ての領域に対してラベル付けを行い、各領域の上下左右の端部の座標値が前記矩形の処理領域の範囲内にあるか否かを判定し、範囲内ならば閉合ひび割れと決定する。
(もっと読む)
地物選定システム、地物選定プログラム及び地物選定方法
【課題】画像認識を実施する時点における日照の状況も効果的に反映して、予め存在が把握されている複数の地物の中から画像認識の対象とする対象地物を選定する。
【解決手段】所定範囲内に存在する複数の候補地物についての地物情報である候補地物情報を取得し、日陰と日向とのコントラストを示すコントラスト情報を取得し、候補地物情報と日時情報とに基づいて、候補地物のそれぞれについて、候補地物と日陰との関係を示す情報である地物日陰情報を演算し、地物日陰情報とコントラスト情報とを含む日照要因情報に基づいて、候補地物の中から対象地物を選定する。
(もっと読む)
キャッシュメモリ装置及び制御方法
【課題】キャッシュメモリに記憶されたピクセルデータの利用率向上を可能とするキャッシュメモリ装置を提供する。
【解決手段】本発明は、表示する画像データの幅がWピクセルであり、2次元方形領域の幅がaピクセル及び縦がbピクセルの場合、横方向のエントリ数がW/aである数pであり、縦方向のエントリ数が[a×2(1/2)/b]の整数値に2を加えた数qであるエントリマトリクスのキャッシュメモリと、表示画面の座標系の表示アドレスを、表示メモリの画像データの座標系へ角度θで座標変換が行われた、2次元方形領域のメモリアドレスから、エントリアドレスを生成するエントリアドレス生成部と、表示メモリからメモリアドレスを用いた角度θのラスタースキャンで分割画像データを読み出し、キャッシュメモリに書き込む書込制御部と、表示される画像データの全走査線に対応するピクセルデータを順次読み出す読出制御部とを有する。
(もっと読む)
接近物体検知装置及び接近物体検知方法
【課題】低い処理負荷で、自車両と接近物体の位置関係及び自車両が移動しているか否かによらず、接近物体を検知できる接近物体検知装置を提供する。
【解決手段】接近物体検知装置は、異なる時刻に撮像部(2)により取得された車両(10)の周囲を撮影した二つの画像から特徴点を抽出する特徴点抽出部(432)と、その二つの画像間で同一の物体に関する特徴点からその物体の画像上の観測移動ベクトルを求める観測移動ベクトル算出部(435)と、撮像部(2)の移動に起因する各特徴点に対応する物体の見かけの移動ベクトルの最小値を算出する最小見かけ移動ベクトル算出部(434)と、特徴点ごとに観測移動ベクトルから見かけの移動ベクトルの最小値を減じて補正移動ベクトルを算出する移動ベクトル補正部(436)と、その補正移動ベクトルに対応する物体が車両(10)に接近する移動物体か否か判定する判定部(437)とを有する。
(もっと読む)
道路状況把握装置
【課題】画像処理用のパラメータを人手によらず自動的に最適化することが可能となる道路状況把握装置を提供することである。
【解決手段】実施形態の道路状況把握装置は、車両が走行する道路の状況を判定する道路状況把握装置において、カメラで道路上を撮影し、撮影した画像から画像処理を用いて車両通過台数を計測し、得られた車両通過台数とあらかじめセンサを用いて計測した車両通過台数との突合を行ない、最も適合率の高くなるパラメータを最終的な画像処理用のパラメータとして登録する。
(もっと読む)
画像処理装置および方法、ならびに移動体衝突防止装置
【課題】近距離範囲で物体を正確に認識できる画像処理装置および方法、ならびに移動体衝突防止装置を提供。
【解決手段】画像処理装置は、撮像部、および撮像部が撮像した画像を処理する画像処理部を備え、撮像部は、撮像レンズ、撮像レンズを駆動しフォーカシング距離を変更する合焦機構、および撮像素子を有する。合焦機構は、撮像レンズを駆動して撮像レンズの光軸方向における異なる位置の物体を撮像素子に鮮明に結像させるように順次フォーカシング距離を変更するフォーカススイープを行う。撮像部は、フォーカススイープにおいて複数の異なるフォーカシング距離に応じてそれぞれの画像を撮像する。画像処理部は、この撮像された複数枚の画像から、各画像において鮮明に結像された物体を認識し、それぞれの画像の撮像時のフォーカシング距離に対応してこの認識された物体の位置を表示する物体分布画像を生成する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】高解像度画像を座標変換により変形処理して変形画像を生成する際に、大容量のメモリを不要とし、また、メモリのアクセス速度の低下を軽減する。
【解決手段】画像処理装置200は、入力画像を圧縮して圧縮画像を生成する画像圧縮部210と、圧縮画像を格納する記憶部220と、座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算部250と、記憶部220に格納された圧縮画像を、座標情報に基づいて座標変換して読み出すことで、圧縮変形画像を生成する圧縮画像変形部230と、圧縮変形画像を伸長する画像伸長部230を有している。ここで、画像圧縮部210では、入力画像の少なくとも輝度信号(Y)について、ブロック分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮画像を生成する。
(もっと読む)
車外監視装置および車外監視方法
【課題】分割領域内で距離分布のピーク候補となる相対距離が複数ある場合においても、所望する相対距離を特定し、立体物を正しく認識すると共に、処理負荷の軽減を図る。
【解決手段】車外監視装置は、検出領域内に存在する立体物の位置情報を取得し、検出領域を水平方向に対して複数の第1分割領域に分割し(S450)、位置情報に基づいて第1分割領域毎の距離分布のピークに相当する第1代表距離を導出し、第1代表距離に基づき第1分割領域をグループ化して1または複数の第1分割領域群を生成し、第1分割領域群を鉛直方向に対して複数の第2分割領域に分割し(S452)、相対距離が第1代表距離に近接する第2分割領域をグループ化して第2分割領域群を生成し、第2分割領域群が生成された第1分割領域群における、第1代表距離を導出する対象範囲を、第2分割領域群に相当する鉛直範囲に制限する。
(もっと読む)
自転車検出装置及び照射装置
【課題】本発明は、自転車検出装置及び照射装置に係り、暗所において接近する自転車を正確に検出することにある。
【解決手段】照射手段から光が照射される方向を含む領域を撮影するカメラと、カメラに撮影される撮像画像内の光の強さが所定範囲内にあるか否かを判別する強度判別手段と、カメラに撮影される撮像画像内の光が上下に往復運動するか否かを判別する往復運動判別手段と、強度判別手段により肯定判定がなされ、かつ、往復運動判別手段により肯定判定がなされる場合に、前記方向に自転車が存在すると判定する自転車判定手段と、を設ける。
(もっと読む)
通路検出装置、方法、及びプログラム
【課題】轍の検出精度を高めることによって、従来よりも精確に通路を検出することができる通路検出装置を提供する。
【解決手段】所定の撮影領域を撮影した画像である入力画像に含まれる通路領域を検出する通路検出装置1であって、入力画像に対して所定の画像処理を行うことで通路領域の中心領域を抽出する中心ブロック抽出部31と、撮影領域を撮影した赤外線画像を用いて、撮影対象が植物であるか否かを検出する植生検出部32と、植生検出部32による検出結果に基づいて、中心ブロック抽出部31によって抽出された中心領域の位置を補正する中心ブロック補正部33と、中心ブロック補正部33によって位置が補正された中心領域を基準として、通路領域を検出する通路領域検出部34とを備える。
(もっと読む)
161 - 180 / 2,648
[ Back to top ]