
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
61 - 80 / 2,648
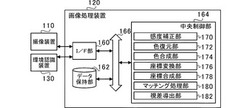
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム

【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、停止線候補が道路幅方向に対して所定長さ未満の形状を有する複数の線分から構成され、車両から複数の線分までの各距離が等距離であり、且つ複数の線分の内で道路幅方向の両端に位置する2つの線分の外側端部間の長さが所定長さ以上であると判定された場合に、該停止線候補を停止線として検出するように構成する。
(もっと読む)
車載カメラ用画像補正方法および車載カメラ用画像補正プログラム
【課題】形状や寸法が既知の図形を用いることなく車載カメラの現在の取り付け角度を求めることができる車載カメラ用画像補正方法および車載カメラ用画像補正プログラムを提供する。
【解決手段】車載カメラ用画像補正方法は、車両に取り付けられたカメラが車両の周囲を撮像するステップS1と、カメラにより撮像された画像内の路面画像にもとづいて動きベクトルを検出するステップS5と、検出された動きベクトルを、真上視点の動きベクトルとなるように車両の進行方向軸、路面法線方向軸ならびに進行方向軸および路面法線方向軸に直交する路面平行方向軸の3軸の各軸周りに独立に回転補正させるための式である真上視点の動きベクトルへの変換式を作成するステップS6と、真上視点の動きベクトルへの変換式からカメラの車両に対する取り付け角度を求めるステップS7と、を有する。
(もっと読む)
対象物種別判定装置
【課題】対象物の種別判定に要する演算負荷の軽減及び種別判定時間の短縮を図ることができる対象物種別判定装置を提供する。
【解決手段】赤外線カメラ2Rにより撮像された撮像画像から対象物の対象物領域Rを抽出し、対象物領域R内の運動判断領域Pについての輝度プロファイルJnを作成する(STEP106)。現在よりΔT前に作成した輝度プロファイルJoをメモリから読出し、Jn,Joの特徴量の差異が所定値以上であるか否かを判定する。所定値以上の差異があれば、対象物は生体(例:歩行者)であると判定し(STEP110)、なければ、現在よりΔT/2前に作成した輝度プロファイルJhをメモリから読出し、Jn,Jhの特徴量の差異が所定値以上であるか否かを判定し、所定値以上の差異があれば、対象物は生体であると判定し、なければ、対象物は生体でないと判定する。
(もっと読む)
画像処理装置及びその方法、並びに画像処理するためのコンピュータプログラム及びコンピュータプログラムを記録した記録媒体
【課題】 本発明は、オルソ画像の画像処理装置及びその方法に関する。
【解決手段】 地図データ保存部から、画像処理の対象となる領域を選択し、第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納部から、該対象領域内に存在する該画像処理の基準となる基準オルソを抽出し、該位置情報に基づいて該基準オルソを配置し、該対象領域内において、補正の対象となる補正領域を指定し、該オルソ画像格納部から、該補正領域内に存在する、該基準オルソ以外の補正オルソ画像を抽出し、該位置情報に基づいて該補正オルソを配置し、該基準オルソにおける第1のポイントと、該補正オルソにおいて該第1のポイントに対応する第2のポイントとを指定して合わせ込み処理し、当該両ポイントに基づいて該補正オルソの該基準オルソへの移動を示す移動ベクトルを生成し、表示する。
(もっと読む)
交通標識検知方法及び交通標識検知装置
【課題】交通標識検知方法及び交通標識検知装置を提供する。
【解決手段】かかる方法は、入力された処理対象画像をHSV色空間画像に変換する色空間変換ステップと、少なくとも一つの交通標識の標準色のパス範囲により、前記処理対象画像のHSV色空間画像のフィルタリングを行い、フィルタリング後の画像領域により、連通域を生成するフィルタリングステップと、前記交通標識の標準規則により、生成された前記連通域のうち、交通標識ではない領域を除去し、他の連通域を前記交通標識の候補領域とする除去ステップと、前記交通標識の候補領域の特徴に基づいて、前記交通標識を識別する識別ステップと、を有する。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
顔向き検出装置
【課題】検出精度の向上及び演算負荷の低減の少なくとも一方につながる新たな顔向き検出装置を提供する。
【解決手段】顔向き検出装置12は、特徴部抽出手段24により抽出された複数の特徴部の中から人物100の鼻孔124を抽出する鼻孔抽出手段24を有する。鼻孔抽出手段24は、複数の特徴部のうち最も移動量の大きい特徴部を鼻孔124として抽出する。
(もっと読む)
特徴点判別装置
【課題】 抽出した特徴点が同一平面上に存在するか否かを精度よく判別できる特徴点判別装置を提供する。
【解決手段】 車両に搭載され、周囲環境を画像として撮像する車載カメラ1と、撮像された画像から特徴点を抽出する特徴点抽出部3と、抽出された特徴点の時間的対応を求める特徴点対応付け部4と、抽出された特徴点の中で所定の位置関係にある3つの特徴点を選択する特徴点選択部5と、選択された3つの特徴点が同一平面上に存在するか否かを判別する特徴点判別部6と、を備え、特徴点判別部6は、選択された特徴点の時間的対応に基づいて、選択された3つの特徴点によって形成される画像上の距離の比が時間的に不変である場合に、選択された3つの特徴点が全て同一平面上に存在すると判別する。
(もっと読む)
高速障害物検出
【課題】移動する構造物を有する環境における画像システムおよび方法の提供。
【解決手段】障害物を検知するためのシステムであって、装置上に配置されて、装置が移動中である運動の領域の画像のビデオストリームを取り込む1台のカメラと、前記画像のビデオストリームを受信し、ビデオストリーム内で受信されるN個の画像のシーケンスからN番目の画像フレームを選択することと、N番目の画像からN−1個の以前の画像のそれぞれを差し引くことによってN−1個の差異画像を決定することと、N−1個の差異画像を足し合わせて、結合された差異画像を生成することと、結合された差異画像に透視変換を実行して、変換画像を生成することと、変換画像内の障害物の端縁を検知することと、運動の領域内での障害物の検知を示す信号を生成することと、によって画像のビデオストリームを処理するように構成される障害物検知機能と、を備えるシステム。
(もっと読む)
外界認識方法,装置,および車両システム
【課題】物体までの距離によらず好適に,車両等の物体検出を行う。
【解決手段】自車周辺を撮影した画像を解析する外界認識装置100は,近傍を表す画像の第一領域,および遠方を表す画像の第二領域を設定する処理領域設定部101と,設定された第一領域において第一の識別器103により物体検出を行う第一の物体検出部104と,設定された第二領域において第二の識別器106により背景パターンをも考慮して物体検出を行う第二の物体検出部104と,検出された物体矩形を補正する矩形補正部107と,検出された物体矩形に基づき衝突までの予測時間を算出する衝突予測時間算出部108を備える。
(もっと読む)
レーン認識装置
【課題】撮像画像上でレーンが映らない場合でもレーン認識を可能にする。
【解決手段】レーン認識装置10は、自車両走行路の撮像画像内に第1画像処理領域を左右個別に設定して車線標示を検出する車線標示検出部31と、検出した撮像画像内の左右一方の車線標示及び車線幅に基づき撮像画像内において左右他方の車線標示位置を推定する車線標示位置推定部33と、自車両走行路の撮像画像内に第1画像処理領域を含みかつ第1画像処理領域よりも広い第2画像処理領域を設定して車線標示を検出する広域車線標示検出部34と、車線標示検出部31による車線標示の検出結果及び車線標示位置推定部33による車線標示位置の推定結果それぞれに対し広域車線標示検出部34による車線標示の検出結果とのマッチングを行う検出結果照合部35と、検出結果照合部35のマッチング結果に基づきレーンを認識するレーン認識状況判断部36とを備える。
(もっと読む)
車両の運転支援装置
【課題】自車両の進行方向と交差する方向で該自車両の前方に向って走行して来る他車を、該他車と自車両との間に存在する遮蔽構造物により検出することができない場合であっても、該他車と自車両との接触を回避するための処理を極力適切なタイミングで行う。
【解決手段】車両2に搭載したカメラ3aの撮像画像から、車両2の進行方向と交差する方向で車両2の前方に向かって移動しており、且つ、障害物検出手段7により検出されていない他車21の前照灯により照明されていると推定される他車照明路面領域を検出する他車照明検出手段8を備える。他車21が検出された場合に、他車21との接触を回避するための対策処理を実行すべきか否かを判断する処理を、他車21が検出される前に、他車照明路面領域が検出された場合と、他車21が検出される前に、他車照明路面領域が検出されていない場合とで異なる判断条件を使用して行なう。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
表面パターンの検出方法及び装置
【課題】本実施形態では、検査対象物が各種のものであっても、柔軟に対応して検査目的を達成できる表面パターンの検出方法及び装置を提供する。
【解決手段】この実施例では、予め撮像した参照用検査対象物の撮像信号に基づく参照用パターンデータを用意し、検査用対象物を撮像した撮像信号に基づくリアル撮像パターンデータを取得し、前記リアル撮像パターンデータを前記検査用対象物のリアル速度情報に基づき圧縮及び又は伸張して修正パターンデータを生成し、前記修正パターンデータと前記参照用パターンデータを比較して、類似か非類似を判定し、判定結果を示す信号を出力する。
(もっと読む)
並列処理システム及び車両走行システム
【解決課題】動画を高速処理して必要情報を抽出する並列処理システム、及び並列処理システムを用いてリアルタイムな動画情報を基に車両の安全走行を行う車両走行システムの提供。
【解決手段】並列処理システム1は、大量のデータをn個のデータ集合体に区分する信号変換部30、信号変換部30からのn個のデータ集合体を処理するデータ処理部50、信号変換部30及びデータ処理部50が連結されているルータ40を具備する。データ処理部50は、区分されたn個のデータ集合体が割り当てられ、割り当てられたデータ集合体を同時並行処理して、所定の処理データを出力するn個のプロセッサ51、ルータ40を介して、n個のプロセッサのそれぞれから出力されるn個の処理データを受け入れ、n個の当該処理データを統合して全体処理を行って所望の加工データを出力する1個のマスタプロセッサ52を含む。
(もっと読む)
運転支援装置
【課題】車載カメラを用いて障害物に対して通過が可能か等の視覚支援をドライバーに与えて運転支援を実現する。
【解決手段】車両15に設置された前方カメラ111の画像に消失線を重畳させて表示し、進行あるいは後行方向における障害物と車両15の接触に関する予測を可視化できるようにした。これにより、ドライバーは、降車による目視、確認作業が必要であるような車両と構造物距離が近く通り抜けが困難なシーンにおいても、車室内にて直視的に接触可能性を判断することが可能となる。
(もっと読む)
道路付属物検出装置、道路付属物検出方法、及びプログラム
【課題】道路標識やガードレールなどの道路付属物を高精度に自動的に検出する。
【解決手段】記憶装置6は検出対象とする道路付属物の画像特徴情報36及び、対象空間における検出対象の形状などに関する形態特徴情報38を予め格納する。画像分割手段20は対象空間を撮影した画像をそれぞれ類似する画素からなる複数の部分画像領域に分割する。候補画像領域抽出手段22は画像特徴情報36に基づいて、部分画像領域のうち検出対象に対応した候補画像領域を抽出する。壁面検出手段24は、対象空間の地物表面の三次元形状を表す点群データに基づいて地物の壁面を検出する。候補壁面抽出手段26は形態特徴情報38に基づいて、検出された壁面のうち検出対象に対応した候補壁面を抽出する。照合手段28は候補画像領域と、画像の撮影位置から見た候補壁面の投影像とを照合し、照合結果に基づいて検出対象を検出する。
(もっと読む)
閉瞼を分類するための方法
【課題】乗り物の操作者コンパートメント内に位置決めされた操作者を監視する画像センサからの生理学的データの部分の信頼性を向上させる
【解決手段】画像センサから、操作者の目、顔、頭、腕、および身体の動きのうちの少なくとも1つに関係する情報を包含する生理学的データを受信するステップと、前記生理学的データに基づいて、少なくとも操作者の閉瞼、目の動き、または頭の動きの徴候の識別を行なうステップと、生理学的データおよび操作者コンパートメント内における照明条件のうちの少なくとも1つと、現在の操作者の状態についてのあらかじめ決定済みの規則のセットとの比較を行なうステップと、閉瞼、目の動き、および/または頭の動きのタイプを、識別による閉瞼、目の動き、および/または頭の動きと比較の結果を相関させることによって分類するステップと、を包含する。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
61 - 80 / 2,648
[ Back to top ]