
Fターム[5B057CC03]の内容
Fターム[5B057CC03]の下位に属するFターム
図形部分 (176)
Fターム[5B057CC03]に分類される特許
101 - 120 / 2,385
道路区画線認識装置
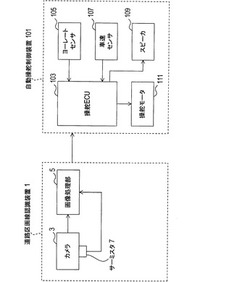
【課題】間欠的な物標から構成される道路区画線を正確に認識できる道路区画線認識装置を提供すること。
【解決手段】車両に搭載され、道路上に間欠的に配置された物標により構成される道路区画線を認識する道路区画線認識装置1であって、前記間欠的な物標を含む一定の領域を撮像可能な撮像手段3と、前記撮像手段3により撮像された画像から、前記物標が示す特徴点を抽出した特徴点画像を生成する特徴点画像生成手段5と、時系列的に連なる複数の前記特徴点画像を重ね合わせて1フレームの合成画像を作成し、前記合成画像における前記特徴点から道路区画線を認識する道路区画線認識手段5と、時系列的に連なる複数の前記特徴点画像のうち、所定の比率以上の前記特徴点画像において、同じ位置に表れている特徴点を、前記道路区画線認識手段による道路区画線の認識に使用する特徴点から除外する除外手段5とを備えることを特徴とする。
(もっと読む)
画像生成装置、画像生成方法、コンピュータプログラムおよび記録媒体

【課題】自然な立体感が得られる立体視用の画像を生成すること。
【解決手段】記憶部14が、被写体を撮影した撮影画像と、その撮影画像に対応する視差画像とを記憶し、処理対象領域抽出部15cが、記憶部14に記憶された視差画像内から被写体に対応する処理対象領域を抽出し、視差値変更部15dが、処理対象領域抽出部15cにより抽出された処理対象領域の視差値を変更し、大きさ調整部15eが、視差値変更部15dにより変更された視差値に基づいて、撮影画像における処理対象領域に対応する被写体の大きさを調整し、画像生成部15fが、大きさ調節部15eにより被写体の大きさが調整された撮影画像に基づいて、立体視用の画像を生成する。
(もっと読む)
情報提供装置
【課題】ドライバを取り巻く状況に応じた提供情報の制御が可能な情報提供装置を提供する。
【解決手段】予め用意された注意モデルとその時々で検出される特定情報とに基づいて注意分布を生成することにより、ドライバの注意が向けられている位置(注視点)を確率的に推定し(S110〜S230)、前方画像から抽出された各オブジェクトに対するドライバの注意量を、注意分布に従って設定する(S240)。更に、予め設定されたルールを用いて、特定情報から特定される状況に応じた各オブジェクトの重要度を設定し(S250)、その注意量と重要度とに基づいて、ドライバに対する情報の提供を制御する(S260)。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラムを記録した記録媒体
【課題】撮影された時系列画像から、人物らしい領域に対して個人が特定できないように画像変換を行う。
【解決手段】複数フレームの画像を元に、各画素の平均値を算出するステップと、平均値から大きく外れている画素値を取り除くステップと、該当画素から分散値を算出するステップと、分散値に対して、膨張処理、収縮処理を行い、分散値画像を生成し、多次元の変換式により変換を行うステップと、背景画像を更新するステップと、取得した画像から低周波数成分画像を生成するステップと、取得した画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と取得した画像との差異から人物らしさを算出するステップと、高周波数成分画像の各画素の値を人物らしさの各画素の値を用いて抑制した抑制後の高周波数成分画像を生成するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成して結果画像を生成するステップを有する。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつ車両毎の走行状態の分析を負荷が集中することなく行うことができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25を有する。
(もっと読む)
運転支援装置
【課題】車載カメラとして単眼カメラを備えた安価な構成により、従来よりコスト低減を図って、撮影カメラの撮影画像から将来の(その後の)TTCを正確に推定することができる車両支援装置を提供する。
【解決手段】車載カメラとしての単眼カメラ2により自車両1の周辺を撮影し、演算部3の近似手段により、単眼カメラ2の複数時点の撮影画像中の障害物の撮影倍率から衝突可能性の経時変化特性を近似し、演算部3の推定手段により、近似手段の近似結果に基づいて将来の衝突可能性を推定する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】可動部を備える可動物体が風景画像に含まれている場合であっても、画像認識を適切に実行可能な画像処理装置を実現する。
【解決手段】可動物体特徴点群GAの基準撮影画像内での位置情報を含む参照データを格納する参照データベース92と、可動物体特徴点群GAが移動する可能性がある範囲を規定した情報を含む移動範囲データRを格納する移動範囲データベース93と、車載カメラによる風景の撮影画像である実撮影画像から実撮影データを生成する実撮影画像処理部と、実撮影データに含まれる対象特徴点群GCの配置が、参照データに含まれる可動物体特徴点群GAの配置を基準とする移動範囲データRに規定された範囲内である場合に、当該対象特徴点群GCを参照データに含まれる可動物体101と認識する画像認識部と、を備える。
(もっと読む)
画像処理装置及び方法、並びにプログラム
【課題】ユーザの撮像行為の目的に合致し、かつ、より自然で現実味のある空の状態を表現できる画像処理を実現可能にすること。
【解決手段】空領域特定部42は、原画像のデータについて、空の像を含む領域を空領域として特定する。空画像生成部43は、空領域の基本となる基本色を設定し、空領域の各画素が示す空の高度をそれぞれ求め、基本色及び高度に基づいて、空領域の各画素が示す空の色をそれぞれ変換するための補正情報として、空画像のデータを生成する。合成部44は、原画像のデータと、空画像生成部43により補正情報として生成された画像のデータとを合成することによって、原画像のデータに対して、空領域の色が補正後の色に変換された合成画像のデータを生成する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】本発明は画像処理装置における撮影画面中の計測範囲設定の調整を容易にすることを目的とする。
【解決手段】視野内に搬送された対象物を撮像して2次元画像を得る撮像手段と、2次元画像を画面に表示する表示手段と、得られた2次元画像から対象物の輪郭を表す輪郭線を抽出する形状抽出手段と、輪郭線上の複数の点の位置を抽出する点位置抽出手段と、複数の点から2次元画像上の対象物の搬送方向における輪郭線の位置を代表する代表点の位置を決定する代表位置決定手段と、少なくとも代表点の位置と2次元画像上の対象物の搬送方向において予め設定された計測幅とに基づいて輪郭線を含む計測領域を得られた2次元画像上に設定する計測領域設定手段と、を備える。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】入力画像内に画像処理の対象となる複数のオブジェクトが規則的に配置されているようなワークに対して、適切な計測処理を行うことができる画像処理装置および画像処理方法を提供する。
【解決手段】複数の処理対象領域の各々に対して実行される共通の画像処理に係る設定を受付け、入力画像に対して複数の処理対象領域を規定するための基準領域の設定を受付け、基準領域を基準として、複数の処理対象領域を規則的に規定するための設定を受付ける。共通の画像処理に係る設定に従って、複数の処理対象領域の各々に対して画像処理を実行し、複数の処理対象領域に対するそれぞれの画像処理の結果を反映した全体処理結果を出力する。
(もっと読む)
画像合成処理装置及びその制御方法
【課題】特別のハードウェア構成や、特別な演算処理の必要が無い簡素なシステム構成とする。そして、YUV422の画像でも境界部分を自然な色で明確に表示できるように、マスクデータ中の置換色の混色を起こさずに置換合成できる画像合成処理装置を提供する。
【解決手段】画像合成処理装置は、背景画像に対して、少なくとも前景画像をある角度だけ回転して置換合成する。元前景画像の特定手段は、前景画像を、そのままの状態で特定する。回転部G5は、前景画像を回転するある角度だけ、背景画像を逆に回転させる。置換合成部G6は、逆に回転された背景画像に対して、元前景画像を置換合成処理する。回転部G8は、置換合成処理された画像を、前景画像を回転させる正方向にある角度だけ回転させる。これにより所望の画像を完成させる。
(もっと読む)
画像処理装置、画像処理方法、撮像装置、および画像処理プログラム
【課題】画像中で注目領域に写る主要被写体がより際立って見える画像を生成可能とする。
【解決手段】画像処理装置100は、処理対象の画像データである元画像データを取得する画像データ取得部102と、元画像データを解析し、元画像データ中の主要被写体を含む部分領域である主要部と、元画像データ中の主要部以外の部分領域である周辺部とを設定する領域設定部104と、主要部における彩度の情報と空間周波数の情報のいずれか、または両方の情報に基づいて、元画像データの補正の要否を判定する画像処理実行判定部106と、画像処理実行判定部106により元画像データの補正が必要であると判定された場合、主要部を含む領域の画像が他の領域の画像よりも際立つよう、所定の色空間で規定される元画像データ中の色座標値を補正した補正画像データを生成する補正画像データ生成部108とを備える。
(もっと読む)
画像処理システム、画像処理装置、及び画像処理方法
【課題】地紋パターンが形成されない領域に形成される複数色の色材としてのトナーの混色による黒色画素は、黒色トナーによる黒色画素と比べて色目が異なる虞があるという課題があった。
【解決手段】黒色の地紋パターンデータ91及びカラー画像データ81を送信する画像処理装置であって、地紋パターンデータ91が形成されている領域を抽出する地紋パターン位置情報抽出部62と、地紋パターンデータ91の形成領域におけるカラー画像データ81に存在する黒色データ84を抽出するデータ抽出部63と、抽出した黒色データ84を領域内黒色データ84aと判定する判定部65と、領域内黒色データ84aを、イエロー色、マゼンタ色、及びシアン色の複数色の色材としてのトナーの混色に変換する色変換部64とを有している。
(もっと読む)
車線推定装置
【課題】二重白線等、走行車線の内外に、走行車線と誤認し易い車線候補点が断続的にプロットされた場合であっても、走行車線を連続して推定することができて、安定した運転支援を行うことができるようにする。
【解決手段】前回求めた走行車線の内側エッジを推定する仮想線に基づいて今回の予測標準線LpL,LpRを求め(S12)、この予測標準線LpL,LpRと車線境界をプロットする第1候補点P1の点列との一致度を求め(S13)、第1候補点P1が最も一致度が高いと判定した場合、この第1候補点P1の点列を今回の主候補点Pmの点列として設定する(S18)。そして、この主候補点Pmの点列に基づき曲線近似式(y=ax2+bx+c)から、今回の走行車線の内側エッジを推定する仮想線Lsを求める。
(もっと読む)
画像形成装置、画像処理方法
【課題】複数のコアを持つ画像形成装置において、描画処理部の待機時間を縮小し、複数のコアにより効率的に印刷することが可能な画像形成装置及び画像処理方法を提供すること。
【解決手段】ページの領域毎に描画処理手段16が描画処理する画像形成装置200であって、印刷データを格納する印刷データ格納手段13と、印刷データを解析し、描画対象とされるオブジェクトの描画命令をページ毎に記述した描画命令データを生成する描画命令生成手段12と、描画命令生成手段と並行して印刷データを解析し、描画処理手段16が受け持つ領域を決定するための最適化情報を作成する最適化情報作成手段14と、描画命令データと最適化情報を記憶する中間データ記憶手段15と、最適化情報に基づき受け持つ領域を決定し、領域毎に描画命令データを描画処理する描画処理手段16と、を有することを特徴とする。
(もっと読む)
画像処理装置及びその制御方法
【課題】動画像用処理回路を用いて、動画像のフレーム画像データよりも大サイズの静止画像データに対し高画質な画像処理を行う。
【解決手段】大サイズの静止画像データをフレーム画像データのサイズ以下の分割静止画像データに分割し、各分割静止画像データを複数の局所領域に分割し、局所領域毎の局所統計量を生成し、局所統計量を用いて各局所領域の画質変換を行うことにより、各分割静止画像データの画質変換を行う。画質変換した各分割静止画像データを縮小して結合する。各分割静止画像データの全体統計量を生成し、生成した複数の全体統計量から一つの全体統計量を算出し、一つの全体統計量を用いて、前記結合して得た結合画像データの画質変換を行う。前記縮小の縮小率は、結合画像データのサイズが前記フレーム画像データのサイズ以下となるように決定する。
(もっと読む)
車両用周囲画像表示装置及び方法
【課題】注意対象物の強調効果が低減されない態様で枠線表示を表示すること。
【解決手段】本発明は、車両に搭載される車両用周囲画像表示装置1,2であって、車両周辺を撮影するカメラ20,22に接続される処理装置10,12を備え、処理装置10,12は、カメラ20,22からの撮像画像を処理して注意対象物を認識すると共に、該認識した注意対象物を少なくとも部分的に囲む枠線表示70を撮像画像に重畳した表示用画像を生成し、枠線表示70は、第1の色で描画される第1枠線部72と、第1の色と異なる第2の色で描画される第2枠線部74とを備えることを特徴とする。
(もっと読む)
撮像装置およびプログラム
【課題】歪み補正で生じた撮影画像中の変形箇所を自動的に確認できる撮像装置を実現する。
【解決手段】画像処理部14は、制御部10の制御の下に、例えば名刺やホワイトボードなどの被写体を撮像した撮影画像に歪み補正(レンズ収差補正又は台形補正)を施して補正画像を生成する。制御部10は、生成された補正画像中から変形率が閾値より高い領域を検出し、該当する領域を順次拡大表示する。つまり、歪み補正により文字が変形したりボケてしまったりする可能性の高い箇所を順番に拡大表示する為、歪み補正で生じた撮影画像中の必要箇所だけを自動的に確認することが可能になる。
(もっと読む)
視線検出装置
【課題】視線方向の検出精度および検出結果の信頼性を向上させる。
【解決手段】視線検出装置10の視線方向選択部30は、第1視線方向および第2視線方向が検出された場合に、第1視線方向と第2視線方向との角度差の絶対値が第1所定値未満である場合には第1視線方向を選択し、角度差の絶対値が第1所定値以上である場合には第2視線方向を選択する。視線方向選択部30は、第1視線方向のみが検出された場合、この第1視線方向(現フレームの第1視線方向)と、1つ前のフレームの第1視線方向(前フレームの第1視線方向)との角度差が第2所定値未満である場合には、現フレームの第1視線方向を選択し、角度差が第2所定値以上である場合には、前フレームの視線方向を車両の乗員の視線方向として選択する。視線方向選択部30は、第2視線方向のみが検出された場合には、この第2視線方向を車両の乗員の視線方向として選択する。
(もっと読む)
101 - 120 / 2,385
[ Back to top ]