
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
181 - 200 / 1,346
アクティブ型車両視界補助装置及び車両視界補助方法

【課題】車両搭載用などに適し、路上や路側などにある対象物を精度よく検出でき、運転者がその物体が何であるかの識別を容易に行えるように支援できるようにする。
【解決手段】対象物からの反射光を受けて複数の波長帯域ごとの画像を表す信号を生成する受光部と、少なくとも1つの波長帯域の画像において同等の信号強度を有する画素のうち占有面積が最大となる画素の集合を基準エリアと設定し、基準エリア以外の画素である各識別対象画素ごとに、波長帯域ごとの画像での当該画素の値と基準エリアでの画素値とを比較することによって対象物の検出に有効な少なくとも2つの波長帯域を選択する波長選択部と、識別対象画素ごとに選択された複数の波長帯域の組み合わせに基づいて、識別対象画素をグループ化し、グループ化した結果に基づいて、対象物を区別して表示した画像を表示する表示部と、を設ける。
(もっと読む)
位置姿勢推定装置及びその方法

【課題】 物体・撮影環境において、安定的に物体の位置及び姿勢を計測することを目的とする。
【解決手段】 物体を撮影した撮影画像を入力する。物体の3次元座標を含む距離画像を入力する。撮影画像から画像特徴を抽出する。画像特徴に対応する距離画像上の位置における3次元座標から、画像特徴が物体の形状を表すか否かを判別する。物体の形状を表すと判別された画像特徴と物体の形状を有する3次元モデルの一部とを対応付ける。対応付けに基づいて、物体の位置姿勢を推定する。
(もっと読む)
カメラ装置、カメラ装置用プログラム、および、画像マッチング方法
【課題】計算コストを増大させずに高精度な画像マッチングを実現するカメラ装置、カメラ装置用プログラムとこれを記録した記録媒体、および、画像マッチング方法を提供する。
【解決手段】複数のカメラ100からそれぞれ出力された複数の画像を取得する画像取得手段110、111と、画像取得手段が取得した複数の画像内において複数の画素を包含する同一サイズのウィンドウを設定し、ウィンドウを比較することにより、各画像における対応する箇所を検索する対応箇所検索手段120、121、130、131、140と、を有し、対応箇所検索手段は、複数のカメラの基線長方向の長さのみが異なる複数種類のウィンドウを用いて対応する箇所を検索する。
(もっと読む)
区画線検出装置
【課題】区画線を適切に検出する区画線検出装置を提供する。
【解決手段】画像処理ECUは、路面画像のデータを取得し(S10)、取得した路面画像に基づいてエッジ点を抽出する(S12)。次に、S12にて抽出されたエッジ点から縦方向に連続するエッジ点をノイズとして除去し(S14)、ハフ変換によってエッジ線の抽出を行う(S16)。次に、抽出したエッジ線に基づいて区画線位置の算出を行い(S18)、区画線の逸脱判定を行う(S20)。ここでは、ヨーレートおよび車両速度に基づいて予測した車両の走行軌跡と、S18にて算出した区画線の位置とから車両が区画線を逸脱するまでに要する時間を算出する。算出した時間が所定のしきい値以上であれば逸脱しないと判定し(S20:NO)、しきい値未満であれば逸脱の危険ありと判定し(S20:YES)、ブザー要求の制御信号を出力する(S22)。
(もっと読む)
位置姿勢計測装置
【課題】 対象物体と非対象物体の像を含む距離画像データを入力として対象物体の位置姿勢を推定する処理の高速化、及びメモリ消費量の軽減を目的とする。
【解決手段】 物体を撮影した距離画像上で物体に相当する物体領域に基づいて、該物体の位置姿勢を計測する。そのために、距離画像の領域を分割した部分領域群のうち少なくとも1つの部分領域を物体領域として設定する。物体領域に物体の形状モデルを当て嵌めて、物体の位置姿勢を推定する。当て嵌めの誤差に基づいて、物体領域を更新する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】原稿に含まれる複数の画像コードに基づいて、より複雑な処理の制御を行う。
【解決手段】原稿に含まれた第1の画像コードの解析結果がスキャン禁止を示す情報を含む場合、当該原稿に含まれた第2の画像コードを解析し、第2の画像コードの解析結果がスキャンの条件付き禁止を示す情報を含む場合、当該条件に従って前記原稿のスキャンを許可する画像処理装置。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】高速道路のサービスエリアなど、多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】本発明の駐車検出装置1は、複数の駐車マスを含む駐車検出対象エリアの画像を撮影する撮影手段(カメラ10)と、所定の画像処理を施す画像処理手段(エッジ抽出処理部24)と、駐車検出対象エリアの画像に所定の画像処理を施した判定対象データ(エッジ抽出処理画像データ23c)と、予め駐車マス毎に設定された判定の基準となる判定基準データ23dと、を比較して車両の有無を判定する判定手段(相関率算出部25、相関率判定処理部26)と、を備え、判定基準データは、表示パターンが撮影された駐車検出対象エリアの画像から取得した表示パターンを含む画像領域に所定の画像処理を施したデータであることを特徴とする。
(もっと読む)
測量データの分類方法、測量データの分類装置及び測量データを記録した記録媒体
【課題】短時間で、より精度良く地形を分類できる測量データの分類方法及び測量データを提供する。
【解決手段】真の分類結果が不明である全く新たなエリアにおいても、点群状の測量データを取得すれば、同じ地域特性に属する特徴量の閾値を用いて、サポートベクターマシンにより人手をかけることなく、迅速に建物や樹木の分類を行えることとなる。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の対象物を確実に抽出して、速やかに運転者に知らせることが可能な車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、車両に搭載され、該車両の周辺の物体の位置を特定する物体位置特定手段と、車両に搭載され、該車両の周辺の画像を取得する撮像手段と、撮像手段により取得された画像を多値化する多値化手段と、物体位置検出手段が特定した物体の位置に対応する前記取得された画像に、該物体の位置の各々に対応する所定サイズのマスクを設定するマスク設定手段と、マスク設定手段により設定されたマスク毎に、対応する画像を多値化する際のしきい値を設定する多値化しきい値設定手段と、多値化手段により、対応する多値化しきい値を用いて多値化された画像に基づき所定の対象物の有無を判定する判定手段と、を備える。
(もっと読む)
対応点探索装置
【課題】ステレオカメラを用いて得られた2つの画像についての対応点探索処理において、遠近競合を抑制した対応点探索装置を提供する。
【解決手段】ステレオカメラSCで得られた画像データが入力される画像入力部11と、画像入力部11から出力される画像データに対して、解像度変換を行う解像度変換部12と、解像度変換された画像データに対して対応点探索を行うためのポイント設定を行うポイント設定部13と、ポイント設定された画像データに対して多重解像度処理のための視差を設定するための視差設定部14と、ポイント設定された画像データに対して、ウインドウを設定するウインドウ設定部15と、ウインドウが設定された画像データに対して対応点探索処理を実行する対応点探索処理部16とを備えている。
(もっと読む)
内視鏡装置およびプログラム
【課題】ユーザが被写体を目視して被写体に関する判断を行う際に判断の補助となる情報をユーザに通知することができる内視鏡装置およびプログラムを提供する。
【解決手段】基準点指定部18bは、画像データに基づく画像において、2つの基準点を設定する。基準線算出部18cは、2つの基準点に基づいて、画像における特徴領域を2分する基準線を設定する。座標算出部18dは、基準線上に、画像の特徴を抽出するための抽出点を設定する。プロファイル算出部18eは、基準点または抽出点の空間座標を算出し、被写体に関する計測を行う。プロファイル算出部18fは、抽出点における画像の情報に基づいて、抽出点における画像の特徴を示す特徴情報を生成する。
(もっと読む)
監視装置および方法、並びにプログラム
【課題】顔画像による認識率を向上できるようにする。
【解決手段】顔画像抽出部202は、カメラ38により撮像された画像より、照合対象者の顔画像を抽出する。器官抽出部203は、照合対象者の顔画像より、顔を構成する各器官の部位を抽出する。器官スコア付与部204は、抽出された器官の信頼度を算出する。適正判定部206は、信頼度に基づいて、照合対象者の顔画像として適正であるか否かを判定する。生体情報認識装置21は、適正であると判定された照合対象者の顔画像と、蓄積された蓄積者の顔画像との類似度を計算し、類似度と所定の閾値との比較により、照合対象者の顔画像が蓄積者の顔画像であるか否かを判定する。本発明は、監視システムに適用することができる。
(もっと読む)
コンクリート画像抽出方法
【課題】背景や障害物を含むコンクリート構造物の画像から、誤差となるコンクリート面以外の背景や障害物を除去すること。
【解決手段】コンクリート構造物の色と同じ色であって、コンクリート構造物のテクスチャと同じテクスチャの画素をコンクリート候補領域として構造物抽出部131で抽出し、Cannyエッジ抽出法を用いてコンクリート候補領域から当該コンクリート候補領域内に前景として存在する障害物のエッジを抽出し、コンクリート候補領域内の各画素の輝度値を用いて中央画素に対する16個の近傍画素のテクスチャ量Skをそれぞれ計算し、最大のテクスチャ量を有する近傍画素が位置k=9にあって、16個のテクスチャ量の分散値が0.0001以上である場合に、当該中央画素をコンクリート領域として抽出し、モルフォロジーのDilation領域拡大法を用いてコンクリート領域を障害物のエッジに到達するまで拡大する。
(もっと読む)
画像処理装置、及び、画像処理プログラム
【課題】主要被写体像の様子に応じた画像処理が可能な画像処理装置、及び、画像処理プログラムを提供する。
【解決手段】画像処理装置1は、画像データ記憶部100と、画像読み出し部200と、主要被写体検出部300と、絵画調変換部400と、画像出力部500と、を備える。主要被写体検出部300は、画像データ読み出し部200が読み出した画像データ41が表す画像から、主要被写体像を検出する。絵画調変換部400は、画像データ41が表す画像全域に対して検出された主要被写体像を表す領域が占める割合が、所定の閾値未満である場合、主要被写体像を細かいタッチで、背景画像を粗いタッチで、それぞれ絵画調に変換する。また、絵画調変換部400は、画像データ41が表す画像全域に対して検出された主要被写体像を表す領域が占める割合が、所定の閾値以上である場合、画像全体を所定の粗さのタッチで絵画調に変換する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】撮像された複数の人物の顔画像の画像データの何れも劣化させることなく、均一の表示サイズにすること。
【解決手段】画像取得部71は、夫々異なる人物を被写体として撮像し、撮像された夫々異なる人物の画像の画像データを画像保持フォルダ61に記憶する。顔画像トリミング部73は、記憶された夫々異なる人物の画像の画像データに対して、夫々異なる人物の画像から、顔検出部72により検出された夫々異なる人物の顔を含む顔画像を切り出す処理を実行することで、夫々異なる人物の顔画像の画像データを生成する。顔画像補正部75は、夫々異なる人物の顔画像の表示サイズの中で、最小サイズ選択部74により選択された最小の表示サイズに合致するように、夫々異なる人物の顔画像の表示サイズを補正する処理を、当該夫々異なる人物の顔画像の画像データに対して実行する。
(もっと読む)
画像上または撮像されたオブジェクト上で動作を実行する方法、画像またはオブジェクト上で反復的な動作を実行する方法、幾何学的情報と非幾何学的情報をグラフィック図形に関連付けるステップを含む動作を制御する方法、計測プランを含む方法およびコンピュータ可読媒体
【課題】機械の動作をグラフィカルに制御する簡素で、効率的な方法を提供すること。
【解決手段】オブジェクトの画像を獲得し、実行可能なパターン認識コンピュータ命令に関連付けられている第1の図形をこの画像上に配置し、オブジェクトの画像において第1の特徴部分の画像の位置を特定するために上記実行可能なパターン認識コンピュータ命令を実行し、オブジェクトの画像における第1の特徴部分の前記位置に対応する位置に第1の図形を再度配置し、位置が第1の図形の位置によって決定されて第2の実行可能なパターン認識コンピュータ命令に関連付けられている第2の図形を画像上に配置し、オブジェクトの画像において第2の特徴部分の画像の位置を特定するために第2の実行可能なパターン認識コンピュータ命令を実行し、直接的または間接的に第1の図形および第2の図形の位置に依存する動作を指定する第3の図形を画像上に配置する。
(もっと読む)
運転支援装置及び運転支援装置の制御方法
【課題】簡易な構成で、車両の走行状態に応じて、車両の周辺の障害物をリアルタイムに検出する。
【解決手段】撮影方向が異なる複数の撮影部1a、1b、1cを備え、各撮影部1a、1b、1cにより撮影された車両周辺画像に基づいて、運転支援を行う運転支援装置10において、車両の走行状態に関する走行状態情報が入力される走行状態情報入力部9と、走行状態情報に基づいて、複数の撮影部1a、1b、1cのうちいずれか一の撮影部を選択する撮影部選択部83と、この撮影部選択部83により選択された撮影部により撮影された車両周辺画像に基づいて、車両の周辺の障害物を検出するための障害物検出処理を行う障害物検出部4とを備える運転支援装置を提供する。
(もっと読む)
画像解析
コンピュータにより実施される画像内の特徴を識別する方法を提供する。方法は、複数の第2のモデルを前記画像に適合させるステップであって、前記複数の第2のモデルは共に関心領域をモデル化し、前記関心領域の各部分は、前記複数の第2のモデルのうちの少なくとも2つによりモデル化される、ステップと、前記複数の第2のモデルの前記適合に基づき、前記画像内の前記特徴を識別するステップと、を有する。 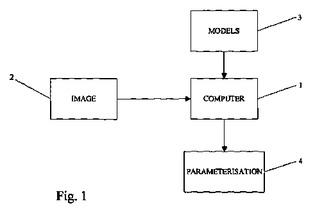 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】微分フィルタによるフィルタ処理を行った場合に生じ得る弊害を抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラ1により撮像された原画像Im1に対して、微分フィルタによるフィルタ処理を施するフィルタ処理部13と、外気温Tsが温度範囲Tw内であるとき及び原画像Im1の輝度分散Lvが閾値Lv_th以下であるときは、原画像Im1に対してフィルタ処理部13によりフィルタ処理を実施して、フィルタ処理後画像Im2から歩行者の画像を検知し、外気温Tsが温度範囲Twから外れ且つ原画像Im1の輝度分散Lvが閾値Lv_thを超えているときには、フィルタ処理を禁止して原画像Im1から歩行者の画像を検知する対象物検知部14とを備える。
(もっと読む)
行動検出装置
【課題】対象とする人物の特定部位の検出やトラッキングを行うことなく顔全体の動きを検出することで、精度良く人物の行動を検出する。
【解決手段】カメラ2で撮像したドライバの顔周辺の画像がコントローラ3の画像入力部10に入力され、動き検出部12で入力画像の顔周辺に設定した領域全体の動きを算出する。そして、確認行動判定部14で画像動き情報と車両情報とに基づいてドライバの確認行動を判定し、判定結果に応じて出力部15から警報出力を行う。これにより、特定部位の検出を行う場合の検出精度の低下を回避し、また、特定部位を撮像するために制限されやすいカメラ設置位置を比較的自由に設定することが可能となる。
(もっと読む)
181 - 200 / 1,346
[ Back to top ]