
Fターム[5B057DA11]の内容
Fターム[5B057DA11]の下位に属するFターム
Fターム[5B057DA11]に分類される特許
61 - 80 / 248
データ処理装置、そのコンピュータプログラムおよびデータ処理方法
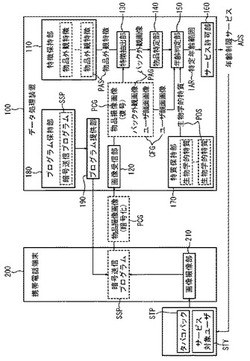
【課題】サービス対象ユーザに年齢制限サービスを簡単かつ確実に提供することができるデータ処理装置を提供する。
【解決手段】データ処理装置100は、特定年齢範囲IARでないと所持できない年齢制限物品STPの各種の物品外観特徴PASを保持する。年齢制限物品STPが撮像されている物品撮像画像PCGを受信すると、物品撮像画像PCGから物品外観特徴PASを抽出して年齢制限物品STPを特定する。この特定でサービス対象ユーザSTYが特定年齢範囲IARと判定されると年齢制限サービスACSの提供を許可する。このため、サービス対象ユーザSTYは特定年齢範囲IARでないと所持できない年齢制限物品STPを撮像して送信するだけで年齢制限サービスACSの提供が許可される。
(もっと読む)
学習装置および方法、認識装置および方法、並びにプログラム

【課題】画像からより確実に対象物体を検出できるようにする。
【解決手段】仮統合識別器生成部27は、統計学習により求められた、複数の弱識別器からなり、画像から対象物体を検出するための服装識別器および輪郭識別器を統合して、仮の識別器である仮統合識別器を生成する。統合識別器生成部28は、仮統合識別器を構成するいくつかの弱識別器を選択し、選択した弱識別器の線形和を特徴関数とする。さらに、統合識別器生成部28は、生成された任意の数の特徴関数のそれぞれに、特徴量を代入して得られた値のそれぞれを、新たな特徴量とし、それらの新たな特徴量を用いた統計学習により、画像から対象物体を検出するための最終的な統合識別器を生成する。本発明は、学習装置に適用することができる。
(もっと読む)
画像処理装置
【課題】環境適合印を含む画像情報を印刷記録媒体に印刷するにあたって、当該画像情報の印刷で指定された印刷条件が、環境適合印の要件に適合しない場合に、環境適合印を含む画像情報がそのまま印刷されることを回避することができる仕組みを提供する。
【解決手段】本発明の画像処理装置1は、印刷記録媒体に印刷される画像情報を入力する画像入力部2と、画像情報の印刷で指定された印刷条件が、画像入力部2によって入力される画像情報に含まれる環境適合印の要件に適合しない場合に、環境適合印の印刷を禁止するように制御する制御部7とを備える。
(もっと読む)
画像処理装置、撮像装置、画像処理方法およびプログラム
【課題】特定顔を含むコンテンツを迅速に利用する。
【解決手段】コンテンツ管理ファイル記憶部250は、特定顔を管理する登録顔エントリと、これに連結して特定顔の特徴量を含むメタデータエントリと、コンテンツを管理するファイルエントリとを格納するプロパティファイルを記憶する。顔検出部212は、撮像部211からの撮像画像に含まれる顔を検出する。特徴量抽出部221は、検出された顔に関する特徴量を抽出する。顔識別部222は、プロパティファイルのメタデータエントリに含まれる特徴量と、特徴量抽出部221により抽出された特徴量とを比較して、検出された顔が特定顔であるか否かを識別する。記録制御部223は、検出された顔が特定顔である場合には、その特定顔を管理する登録顔エントリに、検出された顔が含まれるコンテンツを管理するファイルエントリのエントリ番号を記録する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
【課題】 画像中から複数種類の被写体の判別を効率良く、且つ高精度に行えるようにする。
【解決手段】 複数種類の被写体の判別を行う際に、1つの縮小画像401から複数の局所特徴量を抽出し、当該局所特徴量の夫々と、当該局所特徴量の画像特性に応じた属性とを対応付けて記憶する。そして、注目領域402の特徴量の属性から、複数の被写体に対する被写体尤度を求め、被写体尤度が閾値以上の被写体を被写体候補とし、被写体候補が所定の被写体であるか否かを判定するようにした。すなわち、被写体に固有の特徴量による被写体の判別を行う対象となる被写体の数を絞り込むようにした。その結果、複数種類の被写体の判別を高精度に実現できる。また、局所特徴量の算出及び局所特徴量とその属性との対応付けは、被写体の種別に依らず共通の処理で行うので、複数種類の被写体の判別を効率良く行うことができる。
(もっと読む)
認証用画像撮像装置
【課題】簡単な構成で顔認証に適した認証用顔画像撮像装置を提供する。
【解決手段】認証用画像撮像装置1は、近赤外カメラ12と、近赤外LED10と、強度を変えて被写体を照射するように近赤外LED10を制御すると共に、照明の強度変化に同期して被写体を撮像するように近赤外カメラ12を制御する同期制御部16と、近赤外カメラ12にて撮像された画像から人の顔の画像を検出する顔検出部18と、顔検出部18で検出された顔の画像を複数の部分領域に分割し、各部分領域の画素値の分布を算出する画素値分布解析部20と、照明の強度を変えて撮像された複数の画像において対応する部分領域の中から、画素値分布解析部20にて求めた各部分領域の画素値の分布に基づいて一つの部分領域を選択する処理を、顔の画像を構成する全ての部分領域について行い、選択した部分領域を合成して認証用顔画像を合成する認証用顔画像合成部22とを備える。
(もっと読む)
標識認識装置及び標識認識方法
【課題】認識対象に発光体標識と非発光体標識の両方が含まれる場合でも、その標識の内容を的確かつ比較的容易に認識することができる標識認識装置及び方法を提供すること。
【解決手段】標識認識装置100は、発光体標識照合部112と、非発光体標識照合部113と、候補領域画像の輝度分布に基づいて、候補領域画像が発光体標識の画像かあるいは非発光体標識の画像かを判断する輝度分布評価部104と、候補領域画像が発光体標識と判断された場合には発光体標識照合部112で照合を行わせ、候補領域画像が非発光体標識と判断された場合には非発光体標識照合部113で照合を行わせる照合制御部105とを有する。
(もっと読む)
歩行者性別判定装置、歩行者性別判定方法、歩行者性別判定プログラムおよびその記録媒体
【課題】 撮像装置をもって多方向から撮影された画像を用いて、精度良く歩行者の性別を判定する。
【解決手段】 性別判定装置1には複数の撮像装置をもって歩行者を撮影した画像が時系列に入力されている。この性別判定装置1の歩行者領域抽出部12は、入力画像に映っている歩行者の位置の画素と、背景画像の前記歩行者に対応する位置の画素とで値の差分からシルエット画像を生成する。人物モデル構築部13は、前記シルエット画像を用いて3次元人物モデルを構築し、各関節の角度と関節間の長さをパラメータとして取得する。歩行周期切り出し部15は、前記パラメータから歩行周期を算出する。特徴量抽出部16は、歩行周期毎に切り出されたパラメータ列から肩部および腰部の関係により性別の特徴量を得る。性別判定部18は、前記特徴量をあらかじめ性別のラベルが付与された特徴量と比較して性別を判定する。
(もっと読む)
物体の姿勢を求める方法及び装置
【課題】半鏡面反射性物体の姿勢を求める方法及び装置の提供。
【解決手段】カメラは、半鏡面反射性物体の一組の符号化画像及び一組のフラッシュ画像を取得する。符号化画像は、レーザービームパターンで物体を走査しながら取得され、フラッシュ画像は、カメラに近い異なる場所にある一組の光源で物体を照らしながら各光源につき1枚ずつ取得される。一組の符号化画像から物体の表面上の点の3D座標が求められ、一組のフラッシュ画像に落ちた影から物体の2Dシルエットが求められる。一組のフラッシュ画像の照度差ステレオから3Dの点の面法線が得られる。3D座標、2Dシルエット及び面法線を物体の既知の3Dモデルと比較して、物体の姿勢を求める。
(もっと読む)
色処理装置およびプログラム
【課題】色データが測色された際の下地となった用紙の色度の如何に拘わらず色再現性の低下を抑制する。
【解決手段】第1色空間の変換対象色データを取得し、マッピング処理部30にて変換対象色データを第1色空間に設定された所定の色域内部または所定の色域表面にマッピング処理する。また、変換対象色データの変換先である第2色空間の複数の色データと、第2色空間の各々の色データに対応する第1色空間の色データとを一対とする複数の色データ対を取得し、取得した第1色空間の色データをマッピング処理部30での所定の色域内部または所定の色域表面に設定された基準色座標との色差に応じて補正し、第2色空間の色データと補正された第1色空間の色データとを用いてマッピング処理された変換対象色データを第2色空間の変換色データに対応付ける色変換係数を色変換テーブル生成部70にて生成する。
(もっと読む)
プロファイル作成方法、プロファイル作成装置、プロファイル作成プログラムおよび印刷装置
【課題】高い色再現性を実現するプロファイルを作成する。
【解決手段】DSC20が使用するカメラRGB空間とCIELAB空間との対応関係を規定したプロファイルを作成するにあたり、複数のカラーパッチCPの測色XYZ値と、当該カラーパッチCPを前記画像DSC20によって入力したカメラRGB値との対応関係に基づいてカメラRGB空間とCIELAB空間との対応関係を規定する多格子3D―LUTを作成する。そして、多格子3D―LUTを参照してカメラRGB値を変換した変換XYZ値と測色XYZ値との色差ΔEを小さくするように多格子3D―LUTを調整する。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、印刷装置、オブジェクト検出プログラムおよびオブジェクト検出プログラムを記録した記録媒体
【課題】オブジェクト検出処理における検出時間を短縮する。
【解決手段】画像データD1から取得した窓画像データWDを90°おきに回転させ、回転させた各窓画像データに対し複数の判定器J1〜Jnで判定を行い、判定器J1〜Jnの全てで正判定した場合に窓画像データWDにオブジェクトありと判断するにあたり、回転させた各窓画像データに対しまとめて判定処理を行う関数と出力値とが対応付けられた関数テーブルを備えさせ、画像データD1から取得される窓画像データの回転角度組合せに対し、前記判定器の1つで判定する関数を前記関数テーブルを参照して設定し、組合せに含まれる各回転角度の窓画像データWDに対して関数で正否判定を行い、該正否判定で正判定された回転角度の組合せに対し次の判定器で判定を実行するための関数を前記関数テーブルを参照して設定する。
(もっと読む)
カラー画像処理装置,カラー画像処理プログラム
【課題】所定の色彩画像を含む領域の面積や形状を検出し,その検出結果(面積や形状)に応じて表示手法を変えることで,予め定められた色彩が含まれる領域がどんな面積であっても常に見やすい識別表現を含んだ画像を形成することのできる画像処理装置を提供すること。
【解決手段】印字対象の画像データを分析して,予め定めた色彩の画像が含まれる領域を抽出された前記領域の面積或いは形状を検出し,検出された前記領域の面積或いは形状を用いて,前記領域の面積或いは形状と,これに対応する表現手法とを対応づけて記憶する面積など−表現手法対応テーブルを参照し,検出された面積或いは形状に対応する表現形式による表示を前記領域或いはその近傍に付加するようにしたカラー画像処理装置。
(もっと読む)
画像認識装置
【課題】カメラ画像中の歩行者を精度よく迅速に認識することができる、量産化に好適な構成の画像処理装置を提供する。
【解決手段】移動方向判断部11の物標の移動方向の判断に基づき、歩行者パターン選択部13により、歩行者パターン記憶部12に予め記憶された移動方向別の歩行者画像から、移動方向判断部11により判断された移動方向の移動姿勢の歩行者画像を選択し、認識処理部10により、選択された移動方向の歩行者パターンとカメラ画像中の認識対象の物標の画像パターンとを照合し、少ない処理負担で精度よく迅速に歩行者を認識する。
(もっと読む)
車両用周囲監視装置
【課題】ドライバーが死角領域の状況をより確実に把握することが出来る車両用周囲監視装置を提供する。
【解決手段】本発明は、ドライバーから見て前方で左右に広がる領域内の死角領域を監視する車両用周囲監視装置であって、死角領域の実画像を撮像するように車両の前方部に設けられた実画像撮像手段(2、6)と、この実画像撮像手段により撮像された実画像を記憶する実画像記憶手段(30)と、実画像撮像手段の死角領域の画像を実画像記憶手段により記憶された過去の実画像から仮想画像として生成する仮想画像生成手段(38)と、この仮想画像生成手段により生成された仮想画像を実画像撮像手段により撮像された実画像と共に表示する表示手段(26、14)と、を有する。
(もっと読む)
撮像手段の調整装置および物体検出装置
【課題】撮像手段により撮像された画像中で物体の光源の光が拡散しないように撮像手段の露光量等を自動的に調整することが可能な撮像手段の調整装置およびそれを用いて周囲の物体を検出する物体検出装置を提供する。
【解決手段】撮像手段の調整装置10は、撮像手段2により撮像された画像T中から物体Vahを検出する物体検出手段11と、検出された物体Vahに設けられた光源TLl、TLrを検出する光源検出手段12と、物体Vahの光源TLl、TLrが撮像された画像領域を含む画像T中の所定の画像領域PTにおける輝度値p1ijの分布形状を検出する輝度形状検出手段13と、輝度値p1ijの分布形状に基づいて撮像手段2の露光量と撮像手段2から出力される画素の輝度値の少なくとも一方の調整を行う調整手段14と、を備える。
(もっと読む)
物体検出装置
【課題】画像の背景と物体とを容易に分離して検出することができる物体検出装置を提供する。
【解決手段】画像領域(検出領域)D1のエッジ情報を取得する物体候補抽出部22と、検出領域D1のエッジの画素の分布状況に基づいて物体の大きさを取得し、取得した物体候補の大きさの時間的な変動量を取得する変動量取得部23と、取得した変動量に基づいて物体を検知する物体検出部24とを備えることにより、検出領域D1からエッジ情報を取得し、取得したエッジ情報における画素の分布状況に基づいて物体の幅の変動量を取得し、その変動量が大きいものを物体として検知することにより、容易に物体と背景とを分離して検出することができる。
(もっと読む)
車両存否判定装置、車両存否判定方法及びプログラム
【課題】画像式車両検知器において、比較的簡単な演算処理で精度の高い車両検出を実現すること。
【解決手段】画像式車両感知器1の制御装置20では、1)カメラ10による撮影画像と所定のテンプレート画像とのパターンマッチングを行ってマッチング率Rを算出し、所定閾値と比較することによる停止車両の検出と、2)フレーム間差分法を用いた移動車両の検出とを行い、双方の検出結果をもとに車両の存否を判断する。また、移動車両の移動速度Vをもとに、当該移動車両の前方の他の車両が存在しないと推定される領域(車両無し推定領域)を判断し、この車両無し推定領域のマッチング率Rの閾値を、停止車両の検出の際に算出された当該領域のマッチング率Rに応じた値に変更する。
(もっと読む)
物体検出装置
【課題】ステレオマッチング処理を行い、外界の環境の変化と、ワイパや付着物等によるノイズとを的確に判別して物体を検出することができる物体検出装置を提供する。
【解決手段】物体検出装置1は、基準画像TOと比較画像TCとを出力するステレオ撮像手段2と、ステレオマッチング処理を行うステレオマッチング手段7と、基準画像TO上に物体Oを検出する物体検出手段10と、前回フレームでの基準画像TO上の物体Oの距離Z等とに基づいて、今回フレームにおける当該物体Oの予測領域ROest、RCestを基準画像TOと比較画像TCに設定する予測領域設定手段11と、予測領域の輝度値の平均値p1ij_ave、p2ij_aveの差の絶対値が所定の閾値Δpth以上である場合には基準画像TO上の予測領域ROestに検出された物体Oの情報または物体Oが検出されなかったという情報にノイズが含まれている旨の情報を対応付ける判断手段12とを備える。
(もっと読む)
車載用処理装置、ナビゲーション装置、及び車両進行方位補正プログラム
【課題】自車両の進行方位を検出することができない電源オフ状態の間に方向転換装置によって自車両の方向転換が行われた場合であっても、自車両の進行方位を適切に表す進行方位情報を取得することが可能であるとともに、そのために電源オフ状態の間に画像情報を記憶しておく必要がない車載用処理装置及びナビゲーション装置等を提供する。
【解決手段】自車両の進行方位情報Dを取得する方位情報取得手段16と、自車両の周辺の画像情報Gに対する画像認識処理を行い、自車両の鏡像が撮像されたか否かを判定する鏡像判定手段35と、電源33のオン又はオフを検出する電源動作検出手段31と、電源動作検出手段31による電源オン又は電源オフの検出時を基準とする所定の判定期間内に、鏡像判定手段35により自車両の鏡像が撮像されたと判定した場合に、自車両の進行方位を反転させるように進行方位情報Dを補正する進行方位補正手段39と、を備える。
(もっと読む)
61 - 80 / 248
[ Back to top ]