
Fターム[5B057DB06]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | カラー (5,058)
Fターム[5B057DB06]に分類される特許
181 - 200 / 5,058
色推定装置および方法
【課題】カラーチャート撮影時に、複数の撮影条件を自動的に生成することにより、広いダイナミックレンジを十分にカバーした色推定を行うこと。
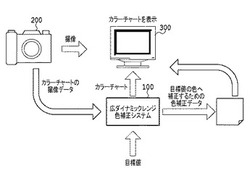
【解決手段】補正したい表示装置300にカラーチャートを表示し、撮像装置200で撮像し、広ダイナミックレンジ色補正システム100に送信する。広ダイナミックレンジ色補正システム100は、送信された撮像データと別途設定されたカラーマッチングしたい目標値とに基づき色補正データ101を生成し、表示装置300に設定する。これにより表示装置300では最初にカラーチャートを表示したときよりも目標値に近い色となり、カラーマッチングを行うことが可能となる。
(もっと読む)
画像提供装置、画像処理方法、画像処理プログラム及び記録媒体

【課題】未完成状態のモザイク画像であっても元画像の絵柄の視認性が高いモザイク画像を提示する。
【解決手段】画像提供装置は、ユーザにより指定された画像を取得する画像取得手段と、取得された画像の色情報と、領域の色情報と、に基づいて、取得された画像の割り当ての候補となる領域を決定する候補決定手段と、候補として決定された領域におけるエッジの度合いを示すエッジ度を取得するエッジ度取得手段と、取得されたエッジ度に基づいて、取得された画像を割り当てる領域を、候補として決定された領域の中から決定する割り当て決定手段と、割り当て決定手段により決定された割り当てに基づいて、取得された画像が配置されたモザイク画像をユーザへ提示する提示手段と、を備える。
(もっと読む)
画像表示システム、画像表示装置及びキャリブレーション方法
【課題】ローカルディミングを行う画像表示装置において効率的にキャリブレーションを行うことができる技術を提供する。
【解決手段】画像表示装置のコントラスト比の目標値を設定し、コントラスト比の目標値に応じて、バックライトの輝度を切り換える段階数及び各段階の輝度を決定し、決定した各段階のバックライトの輝度でバックライトを発光させるとともに、所定の色票を画像表示装置に表示させて測色し、測色値に基づき、バックライトの各段階の輝度でキャリブレーションを行う。コントラスト比の目標値を達成するために必要な段階数のバックライトの輝度についてのみキャリブレーションが行われるので、キャリブレーションの実行回数を必要最小限に抑えることができ、キャリブレーションの実行に要する時間が無用に長くなることを抑制できる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】視覚的に自然な広ダイナミックレンジ画像を生成することができる画像処理装置を提供する。
【解決手段】画素値変換部51は、露光量を互いに異ならせて同一の被写体を複数回撮影した画像信号の画素値を、画素値変換係数Coa,Cobに基づいて変換する。合成重み付け係数生成部52は合成重み付け係数を生成する。平滑化処理部56は、短時間露光画像データDa1と長時間露光画像データDb2とを画面内で平滑化する。差分生成部53は、平滑化したデータの差分を生成する。重み付け合成部54は、短時間露光画像データDa1と長時間露光画像データDb2とを合成重み付け係数を用いて合成する。制御部11は、差分を評価して差分が小さくなるように画素値変換係数を更新する。
(もっと読む)
歩行者認識装置
【課題】認識条件の決定精度の向上と共に、計算時間の短縮を実現することができる歩行者認識装置を提供することを課題とする。
【解決手段】本実施形態によれば、時系列の環境データに基づいて、自車両周辺の交通環境を認識し、当該認識した当該交通環境に関するデータに基づいて、歩行者認識で用いる学習済み識別器または歩行者認識用テンプレートを選択し、時系列の環境データおよび選択された学習済み識別器または歩行者認識用テンプレートに基づいて、歩行者の認識を行う。
(もっと読む)
塗布状態検査装置及び方法並びにプログラム
【課題】塗布全体にわたって異常を検出でき、シール剤に発生した切れ目に限らず、終端部における糸引き等、他の要因による塗布の異常を検出することができ、また、基準ワークを撮影するだけで、自動的に分岐点と端点とをカウントすることができ、容易に部品形状の変更に対応することができる塗布状態検査装置を提供する。
【解決手段】シール剤Sが塗布されたワークWを撮像する撮像装置2と、撮像装置2によって撮像された撮影画像から、シール剤Sの塗布軌跡を抽出する軌跡抽出部4−1と、正常品の分岐点の個数と端点の個数とを記憶する記憶部5と、塗布軌跡の分岐点の個数と端点の個数とをカウントし、記憶部5に記憶されている正常品の分岐点の個数と端点の個数と比較し、双方が一致する場合に塗布軌跡が正常であると判定し、双方が一致しない場合に塗布軌跡が異常であると判定する画像判定部4−2とを備える。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】自車両を駐車可能な駐車枠をユーザに適切に提示できる駐車支援装置を提供すること。
【解決手段】自車両周囲の画像から変換した俯瞰画像内に含まれる、路面上に描画された線状のロードマークを検出し、前記線状のロードマークが複数検出された場合に、複数の前記線状のロードマークのそれぞれについて、検出された他の線状のロードマークに対する平行度を算出し、前記平行度算出手段により算出された平行度が所定の閾値以上である場合に、前記俯瞰画像中に、自車両が駐車可能な駐車枠が存在していると判断する際において、前記線状のロードマークの前記俯瞰画像中における存在位置に応じて、前記閾値を変更する駐車支援装置。
(もっと読む)
画像形成装置、画像処理方法
【課題】特定色の色材で印刷された原稿をスキャンや印刷するときに、より適切な濃度階調に再現することができる技術を提供する。
【解決手段】実施形態の画像形成装置は、取得部と、制御部とを有する。取得部は、シートをスキャンしてシートのカラー画像を取得する。制御部は、取得部によって取得されるカラー画像を、記憶部に記憶されているパラメータに従い、1つまたは複数の特定色が他の色よりも濃いモノクロ画像となるように変換する。
(もっと読む)
内視鏡システム、プロセッサ装置及び画像補正方法
【課題】励起光と蛍光の配光分布の違いによって生じる観察画像内の色むらを低減する。
【解決手段】照射部は、青色のレーザ光を発光するレーザ光源と、レーザ光によって励起されて、緑色〜赤色の蛍光を発光する蛍光体とからなり、蛍光と蛍光体を透過する青色レーザ光の一部の混色により白色の照明光を照射する。レーザ光は指向性が高く、蛍光は拡散性が高いため、両者の配光分布には違いが生じる。観察画像に対して画像処理を施すことにより、両者の配光分布の違いによって観察画像に生じる色むらを補正する。
(もっと読む)
物体検出装置、物体検出方法、および物体検出プログラム
【課題】カメラで撮像した2次元の撮像画像を処理して、全体が単一色でなく、帯模様が形成されているパイロン等の物体について、その検出精度を向上させた物体検出装置を提供する。
【解決手段】物体検出装置1は、画像処理部13が画像入力部12に入力されたカメラ2の撮像画像を処理し、撮像されている物体を検出する。画像処理部13は、画像入力部12に入力された撮像画像について、彩度が設定した彩度閾値よりも高い高彩度領域を抽出する。そして、抽出した2つの高彩度領域を凸包する凸包領域を設定する。そして、物体領域検出処理では、凸包領域設定処理が設定した凸包領域内における2つの高彩度領域間に位置する低彩度領域がこれら2つの高彩度領域をつなぐ独立した領域であるかどうかを判定する。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】 データを複数範囲の何れかに分類する場合に、誤分類を抑制できる
【解決手段】 多段判定部は、複数の範囲のうちの少なくとも1つに判定対象を分類する判定を行うために、N階層(Nは2以上の整数値)の木構造の各ノードとして機能する各判定機を有する多段判定部を備え、各判定機は、判定対象を、2つの範囲のうちの何れか一方に分類する判定を行い、各判定機において判定される2つの範囲には、重複する部分が含まれている。本技術は、データを分類する情報処理装置に適用することができる。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
画像形成装置
【課題】ユーザの指定する特定色の画像形成の際に、特定色の色ずれを検出し、警告または、安定化制御を行うことで、特定色の色ずれによる印刷不良紙の発生を抑えることができる画像形成装置を提供する。
【解決手段】ユーザは特定色を指定し、その色相のずれの許容範囲を設定する。その後、ユーザから指定された特定色の測色用パッチを画像形成し、その色ずれを測定し、特定色と測定用パッチとの色差が該許容範囲から外れているのならば、警告または、安定化制御を行う。
(もっと読む)
撮像装置
【課題】幼児の写真を簡易に撮影する。
【解決手段】デジタル信号回路18は、撮影して得られた画像信号から人体を検出するとともに、顔部を検出する。システム制御回路20は、人体の頭部と肩部の比率から人体の年齢を推定し、しきい年齢以下であれば被写体が幼児であると判定してLED30を自動点滅させて被写体の注意を惹く。
(もっと読む)
画像判別装置、画像特定装置、この画像特定装置を備えた作業工程管理システム、および、プログラム
【課題】画像の照合にかかる時間を可及的に短くし、かつ、適切に画像の照合をすることができる画像判別装置を提供する。
【解決手段】基準マスタ画像における特徴部位を指定する特徴指定部441と、マスタ画像において特徴部位を検出する特徴検出部442と、検出された特徴部位を基準マスタ画像における特徴部位に一致させるように、マスタ画像を変換する画像変換手段443と、撮像画像において特徴部位を検出する特徴検出部446と、検出された特徴部位を基準マスタ画像における特徴部位に一致させるように、撮像画像を変換する画像変換手段447と、変換後マスタ画像の指定色部分と変換後撮像画像の指定色部分とが一致するか否かを判別する判別部449とを備え、判別部449によって一致すると判別された場合に、撮像画像の被写体がマスタ画像の被写体と一致すると判別するようにした。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】実施形態によれば、画像内のオブジェクト領域を精度良く特定することができる画像処理装置、方法、及びプログラムを提供する。
【解決手段】第1設定部は、画像において、少なくともオブジェクトの一部の位置を検出して、画像における一又は複数の画素ごとに、オブジェクトが存在する領域に含まれるかどうかを示す第1尤度を求める。第2設定部は、画像における一又は複数の画素ごとに、画素の特徴量を用いて、画素が立体物に相当する画素であるかどうかを示す第2尤度を求める。特定部は、第1尤度と第2尤度とを用いて、画像におけるオブジェクトが存在する領域を特定する。
(もっと読む)
DTM推定方法、DTM推定プログラム及びDTM推定装置、並びに、3次元建物モデルの作成方法
【課題】LiDARデータに基づいて推定されるDTMの精度を高める。
【解決手段】航空機による地表のレーザースキャナーデータに基づいて、その所定範囲について地表面のみの標高データであるDTMを推定するDTM推定方法であって、所定範囲における単位グリッド内にデータが存在しない画素を連結して河川領域を抽出し、河川領域を除くデータについて、第1の最大許容傾斜値(例えば3度)を設定して暫定的なDTMを推定し、推定したDTMから局所的な傾斜を計算し、傾斜が所定値を超える場合は、第1の最大許容傾斜値より大きい第2の最大許容傾斜値(例えば4.5度)を設定して再度DTMを推定する。
(もっと読む)
画像処理装置、画像処理方法、および制御プログラム
【課題】処理対象領域の境界が不自然に強調されないように補正を行う画像処理を実現することにある。
【解決手段】本発明に係る画像処理装置31は、人物の口を含む顔画像について画像処理を行うものであって、顔画像の少なくとも口の一部を含む第1領域の各位置について、該位置の色と歯の代表色との差に基づいて、該位置が歯であることの尤度を第1器官尤度として特定する歯色類似度特定部51と、第1領域の第1位置からの距離が大きいほど第1重みが小さくなるように第1重みを決定する歯位置重み決定部52と、第1器官尤度および第1重みが大きいほど補正量が大きくなるように該位置の補正量を決定する歯補正量決定部53と、上記補正量を用いて画像を補正する歯画像補正部54とを備える。
(もっと読む)
画像生成装置
【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで生成される俯瞰画像を表示画像として出力する画像生成装置。周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、この立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている種別情報と姿勢情報とに基づいて特定された立体物の特定された向き姿勢での代替画像を出力し、この出力された代替画像が立体物画像領域の位置に合成された代替画像付き俯瞰画像が生成される。
(もっと読む)
表示制御装置および方法、プログラム、並びに記録媒体
【課題】画面に複数の視点を切り替えて表示させる場合に、できるだけ早く表示遷移を完了させるとともにユーザの操作性を向上させることができるようにする。
【解決手段】複数のカメラにより撮影された画像をそれぞれ取得し、前記取得した画像のうちの所定の画像に表示されている特定のオブジェクトを検知し、前記取得した複数の画像において、前記特定のオブジェクトが検知された前記所定の画像とは異なる別の画像で同一のオブジェクトが検知された場合、前記別の画像のオブジェクトの表示の形態を前記所定の画像のオブジェクトを基準として設定し、同一の画面に表示するように制御する。
(もっと読む)
181 - 200 / 5,058
[ Back to top ]