
Fターム[5C034CC10]の内容
Fターム[5C034CC10]の下位に属するFターム
ウエハホルダー (32)
Fターム[5C034CC10]に分類される特許
1 - 20 / 51
エネルギー線照射装置及びワーク搬送機構
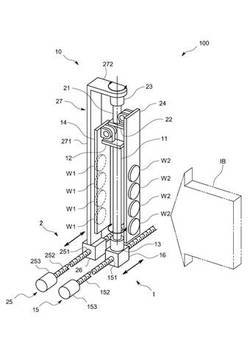
【課題】エネルギー線照射システムにおいて、ワークに効率的にエネルギー線を照射できるようにしながらも、飛躍的なコンパクト化を可能とする。
【解決手段】エネルギー線IBを所定の照射領域Pに向かって射出するエネルギー線射出機構と、前記エネルギー線IBが照射される対象物である第1ワークW1を、前記照射領域Pを含む第1周回軌道O1に沿って周回させる第1周回機構1と、前記エネルギー線が照射される対象物である第2ワークW2を、前記照射領域P1を含む第2周回軌道O2に沿って周回させる第2周回機構2とを具備し、各周回軌道によって形成される仮想の周回面と垂直な方向から視たときに、前記第1周回軌道O1で囲まれる領域と前記第2周回軌道O2で囲まれる領域との少なくとも一部が重なるように構成した。
(もっと読む)
イオン注入装置

【課題】真空引きに要する時間を短縮し得るイオン注入装置を提供する。
【解決手段】イオン注入装置2は、モータ92によってチャンバ10をY軸方向に往復移動させるとともに、モータ29によってウエハ20を回転させることによって、ウエハ20に対するイオン放出チューブ100の位置を調整する。チャンバ10の表蓋12にはチャンバ貫通穴14が形成されており、イオン放出チューブ100はチャンバ貫通穴14の内壁(チャンバ10の外壁)に干渉しない。本実施例のイオン注入装置2では、従来のイオン注入装置のようにチャンバがウエハの移動に応じて変形する必要がなく、チャンバを大きく形成する必要もない。そのため、チャンバ10を従来のイオン注入装置に比べて小さくすることができる。その結果、チャンバ10内の真空引きに要する時間を、従来のイオン注入装置に比べて短縮することができる。
(もっと読む)
イオン注入システム
【課題】イオン注入システムを提供する。
【解決手段】イオン注入システムは、イオンビーム生成器、質量分離装置、ホルダー装置、及び、第一検出器を含む。イオンビーム生成器は第一イオンビームを生成する。質量分離装置は、第一イオンビーム中から、必要なイオンを含む第二イオンビームを分離する。ホルダー装置は少なくとも一つの基板を固定する。ホルダー装置、及び、第一検出器は、第二イオンビームに相対して、第一方向に沿って相対往復移動して、基板、及び、第一検出器を第二イオンビームの投射領域に通過させる。第一検出器は、第二イオンビームの関連パラメータを取得する。上述のシステムは、イオン注入実行時、イオンビームの関連パラメータを取得して、システムが、直ちに、製造パラメータを調整して、好ましいイオン注入効果を達成する。
(もっと読む)
イオン注入方法及びイオン注入装置
【課題】イオン注入方法において、ウエハをメカニカルスキャン方向において複数の注入領域に分け、その注入領域ごとにビームスキャン速度を可変にし、それによってウエハ内のイオン注入量を制御する場合に、それぞれの注入領域のビームスキャン周波数とビームスキャン振幅を共に固定しながら注入領域ごとに目的のイオン注入量分布とイオン注入量とを実現する。
【解決手段】各注入領域ごとのイオン注入量分布に対応するビームスキャン速度の可変設定により算出した速度パターンに基づいてビームスキャン速度を変更制御し、ウエハスキャン速度を各注入領域ごとに制御することにより、ウエハ面内の各注入領域のイオン注入量を制御するとともに、前記各注入領域ごとのビームスキャン速度の制御におけるビームスキャン周波数とビームスキャン振幅を一定とするよう構成し、各注入領域に所望のイオン注入量分布を有するイオン注入を実現する。
(もっと読む)
イオン注入方法及びイオン注入装置
【課題】ウエハのステップ回転を用いることなくイオン注入を行う場合に、プラズマを利用した工程及びアニール工程で発生しやすい面内不均一パターンに対応した形状に対応した2次元イオン注入量面内分布を実現する。
【解決手段】イオンビームを往復走査し、イオンビーム走査方向に直交する方向にウエハをメカニカルに走査して、イオンをウエハに注入するに際し、イオンビーム走査方向のビーム走査速度とメカニカル走査方向のウエハ走査速度を同時かつ独立に、速度補正量を規定する別々の制御関数を用いて速度制御して、他の半導体製造工程のウエハ面内不均一性を補正するための等方的な同心円形状のウエハ面内イオン注入量分布を生成する。
(もっと読む)
イオンビーム照射方法とその装置
【課題】2台のイオンビーム供給装置により基板の上半分と下半分にイオン照射するインライン式のイオン照射装置において、1台のイオンビーム供給装置が停止又は処理途中で異常終了した場合であっても、基板全面に所望のドーズ量が注入できるようにする。
【解決手段】イオンビーム照射処理を1往復行った後、基板回転機構70を制御し、基板2を180度回転させた後、イオンビーム照射装置100に再投入し、イオンビーム照射処理未完了の範囲をイオンビーム照射し、基板の全面にイオンビーム照射させることを特徴としたイオンビーム照射方法。
(もっと読む)
イオン注入装置
【課題】時々刻々と変化する処理室内での圧力変動に応じて、ターゲットに照射されている実質的なビーム電流の値を算出可能にするとともに、ターゲットのチャージアップに起因するゆらぎの影響を受けずに正確なビーム電流の測定を可能とするビーム電流測定器を備えたイオン注入装置を提供する。
【手段】このイオン注入装置1は、処理室7内の圧力を測定する圧力計8と、イオン源2とターゲット9との間に配置されているとともに、イオンビーム3のビーム電流を部分的に測定するビーム電流測定器6と、圧力計8による測定値が予め決められた基準値以上となった時、少なくともビーム電流測定器6の測定結果に基づいて、ターゲット9に所定量のイオンビームが照射されるように、イオン注入パラメーターを調節する制御装置12と、を備えている。
(もっと読む)
パターン注入用段階的マスキング
基板のパターン注入を行うためにマスクを動かす改善方法を開示する。マスクは複数のアパーチュアを有し、基板とイオン源との間に配置される。基板をイオンビームにさらした後、マスクは、基板に対し新たな位置にインデックスを付けられ、続いて注入工程が行われる。アパーチュアのサイズと形状、インデックス距離及び注入工程の数の選択により、様々な注入パターンを生成することができる。いくつかの実施態様では、注入パターンは、水平ストライプ間のより低濃度にドープした領域を有する高濃度にドープした水平ストライプを含む。いくつかの実施態様では、注入パターンは、高濃度ドープ領域の格子を含む。いくつかの実施態様では、注入パターンは、バスバー構造を用いて使用するのに適している。  (もっと読む)
(もっと読む)
極低温イオン注入機の表面の再生用光学ヒーター
イオン注入機において、1つ以上の光学ヒーターを一対の支持アームの上方に配置する。支持アームは、プラテンの下に配置される係合位置と、プラテンから離れて垂直方向に変位され、かつ、プラテンの平面に対して平行な方向にプラテンから離れて回転された引っ込んだ位置とを有する。支持アームが引っ込んだ位置にある場合に、支持アーム上の不所望な物質を除去するために、1つ以上の光学ヒーターは、支持アーム上に配置された冷却パッドの表面に入射する光エネルギーを供給するように構成される。このように、光学ヒーターは、イオン注入機における極低温表面の再生サイクルの期間中に用いられる。  (もっと読む)
(もっと読む)
ウエハーに対する均一イオン注入の方法とその装置
【課題】本発明はウエハーとイオンビームの間の相対運動と幾何学関係を変化させることにより、均一ウエハーに対する注入方法と装置を提供する。
【解決手段】はじめに、ウエハー上に第一軸の長さと第二軸の幅を持つ帯状のイオンビームを形成し、このイオンビームの長さはウエハーの直径より長く、イオンビームの幅はウエハーの直径より狭い。そして、イオンビームが通過するスキャン経路に沿って、ある移動速度でウエハーの中心を移動させ、同時に、ある回転速度でウエハーを回転させる。移動及び回転が同時になされている間、ウエハーがイオンビームを通過する時、このウエハーは第一軸に沿って、イオンビームによって完全に覆われ、一番速い回転速度は移動速度の数倍である。移動速度と回転速度は常数、あるいは、イオンビームのウエハーの位置の関数に相対する。
(もっと読む)
高速−低速走査を用いるマスクイオン注入
改良した太陽電池製造方法は、イオン注入装置のイオンビームに対して固定したマスクを利用する。イオンビームをマスクの複数の穴を介して基板へ向ける。基板を第1走査速度で移動する際にイオン線量率で、また基板を第2走査速度で移動する際に第2イオン線量率で基板にあてられるように、基板を異なる速度で移動させる。走査速度を変更することによって、種々の線量率を対応する基板位置で基板に注入することができる。これは、イオン注入を用いて太陽電池の製造に有利な精密ドーピングプロフィールを提供することを可能にする。 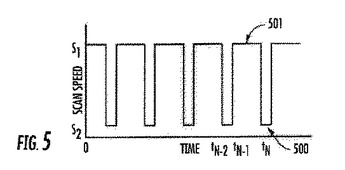 (もっと読む)
(もっと読む)
ファラデープローブを利用したマスクの状態のモニタリング
【解決手段】 イオン注入装置において、イオン電流測定器は、ターゲット基板がプラテン上に位置していると仮定して当該ターゲット基板の表面と同一平面になるように、マスクの後方に、配置されている。イオン電流測定器は、イオンビームを横切るように並進させられる。マスクの複数の開口を通過するように方向付けられているイオンビームの電流は、イオン電流測定器を用いて測定される。このようにして、イオン電流測定器によって測定されたイオン電流プロフィールに基づき、イオンビームに対するマスクの位置およびマスクの状態を決定するとしてよい。 (もっと読む)
ワークピース処理システム
ワークピース処理システムは、イオン注入のためにワークピースを支持するように構成されたプロセスチャンバと、プロセスチャンバの外側でマスクステーション内に格納された第1のマスクと、マスクステーションから第1のマスクを取り出し、この第1のマスクをワークピースの上流に位置させて、ワークピースが第1のマスクを介して第1の選択注入を受けるように構成された、ロボットシステムとを含む。ワークピース処理方法は、プロセスチャンバの外側でマスクステーション内に第1のマスクを格納するステップと、マスクステーションから第1のマスクを取り出ステップと、イオン注入のためにプロセスチャンバ内に位置付けたワークピースの上流に第1のマスクを位置付けるステップと、第1のマスクを介して第1の選択注入を実施するステップと、を有する。  (もっと読む)
(もっと読む)
イオン注入方法およびイオン注入装置
【課題】 基板のステップ回転を用いることなく、基板の面内に、円形状注入領域と、それを囲んでいて当該円形状注入領域とはドーズ量の異なる外周部注入領域とを形成することができるイオン注入方法等を提供する。
【解決手段】 このイオン注入方法は、基板2の面内におけるイオンビーム4の走査速度を可変にして、基板2の面内におけるイオンビーム4の1片道走査または1往復走査ごとのX方向における走査速度分布を、基板2のY方向の位置に応じて変化させることによって、基板2の面内に、円形状注入領域と、それを囲んでいて当該円形状注入領域とはドーズ量の異なる外周部注入領域とを形成するものである。
(もっと読む)
低慣性、多軸、多方向に、機械的に走査するイオン注入システム
イオンビームを発生するように構成されたイオン注入システムが提供される。エンドステーションは、少なくとも4つの自由度を有するロボット構造物を備える。エンドエフェクタは、ワークピースを選択的に保持してイオンビームに対して移動させる上記ロボット構造物に作動的に連結される。上記ロボット構造物は、上記エンドステーションに作動的に連結される複数のモータを備え、上記複数のモータの各々は、回転シャフトを備える。各回転シャフトの少なくとも一部は、ほぼ上記エンドステーションの内部に備えられ、上記複数のモータの各々は、自身に接続されるリンク機構を備え、各リンク機構は、クランクアームおよび支柱を備える。各リンク機構の上記クランクアームは、それぞれ上記回転シャフトに固定接続され、各リンク機構の上記支柱は、第1の連結部において上記クランクアームにそれぞれ回転可能に接続され、第2の連結部において上記エンドエフェクタに回転可能に接続されている。  (もっと読む)
(もっと読む)
イオン注入方法およびイオン注入装置
【課題】スキャン端付近での基板の加減速時間を主体とするロス時間の累積を抑制してスループットを向上させる。
【解決手段】このイオン注入方法は、イオンビーム4のビーム電流、基板2へのドーズ量を用いて、当該ドーズ量を実現するための基板2のスキャン速度を算出するステップと、スキャン速度が許容スキャン速度範囲内にあるか否かを判断して、当該範囲内にあればそのときのスキャン回数、スキャン速度をそれぞれ実用スキャン回数、実用スキャン速度とし、当該範囲の上限よりも大きい場合は処理を中断し、当該範囲の下限よりも小さい場合はスキャン回数を1増加させて修正後のスキャン回数を算出し、修正後のスキャン回数等を用いて修正後のスキャン速度を算出し、修正後のスキャン速度が許容スキャン速度範囲内に入るまでスキャン速度判断および修正スキャン速度算出を繰り返すステップとを有している。
(もっと読む)
イオン注入方法およびイオン注入装置
【課題】 基板のスキャン回数が奇数になることを防止して、スキャン回数が奇数になる場合のロス時間を無くし、スループットを向上させる。
【解決手段】 イオンビーム4のビーム電流、基板2へのドーズ量および基準スキャン速度を用いて、当該ドーズ量を実現するための基板2のスキャン回数を小数点以下を切り捨てた整数値で算出し、そのスキャン回数が2以上か否かを判断して、2よりも小さい場合は処理を中断し、2以上の場合は当該スキャン回数が偶数か奇数かを判断して、偶数の場合は当該スキャン回数をそのまま実用スキャン回数とし、奇数の場合はそれよりも1小さい偶数のスキャン回数を求めてそれを実用スキャン回数とし、上記実用スキャン回数、ビーム電流およびドーズ量を用いて基板2の実用スキャン速度を算出し、これらに従って基板2にイオン注入を行う。
(もっと読む)
対象物保持アーム
【課題】 半導体ウエハ等の保持対象物の往復運動方向の位置精度を高めることができる保持アームを提供する。
【解決手段】 第1の腕要素(20)が、第1の回転中心(10)を中心として、回転可能に支持され、先端に第2の回転中心(11)を画定する。第2の腕要素(60)が、第2の回転中心を中心として、第1の腕要素に対して回転可能に支持され、先端に第3の回転中心(12)を画定する。伸縮用駆動力発生機構(57)が、第1の腕要素に対して第2の腕要素を回転させる。伸縮用駆動力発生機構によって、第2の腕要素が第1の角度だけ回転したとき、第1の腕要素が、第2の腕要素の回転方向とは反対方向に、第1の角度の1/2の角度だけ回転する。保持部材(80)が、第3の回転中心を中心として、第2の腕要素に対して回転可能に支持される。第1及び第2の腕要素の姿勢を変化させたとき、保持部材が並進移動する。
(もっと読む)
イオン注入装置および半導体装置の製造方法
【課題】イオン注入発散角を抑制することによる半導体基板への注入角度ばらつきの低減を図る。
【解決手段】半導体基板1が保持された保持部材上で、イオンビーム204を一次元走査する走査手段201と、一次元走査の走査方向と直角な方向に、イオンビーム204が保持部材に対して相対的に移動するように、保持部材を移動させる移動手段303と、イオンビーム204の保持部材に対する相対的な移動に対して、イオンビームの、半導体基板1を超えた保持部材上でのスキャン範囲が等しくなるように、走査手段201を制御する制御手段302と、を有する。
(もっと読む)
エネルギー粒子ビームを使用した基板の表面処理方法及び装置
エネルギー粒子ビーム(42)で基板(44)を処理するための方法及び装置である。基板(44)上の特徴(66)は、エネルギー粒子ビーム(42)に対して配向され、基板(44)はエネルギー粒子ビーム(42)を通して走査される。ビーム(42)の長寸法(49)に対して特徴(66)を再配向するために、基板(44)は、エネルギー粒子ビーム(42)への露光から遮蔽される間に、対称な方位軸(45)の周りで周期的に割り出される。 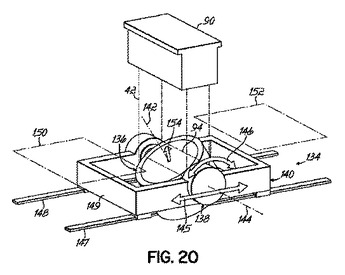 (もっと読む)
(もっと読む)
1 - 20 / 51
[ Back to top ]