
Fターム[5C054FD03]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005) | 座標変換 (695)
Fターム[5C054FD03]に分類される特許
101 - 120 / 695
画像生成システム
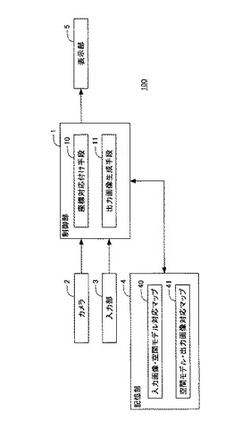
【課題】フックの周辺を見下ろしながらクレーンを操作する操作者に対して有益な画像情報を提示できる画像生成システムを提供すること。
【解決手段】クレーンの操作を支援する画像生成システム100は、巻上装置67が巻き上げ或いは巻き下げるつり具69を鉛直斜め上方から撮像する撮像装置2と、撮像装置2が撮像した画像に視点変換処理を施し、つり具69を水平方向から見た出力画像を生成する出力画像生成手段11とを備える。
(もっと読む)
画像表示システム、画像処理装置及び画像表示方法

【課題】限られた画面内において、複数の周辺領域の様子を比較的大きくユーザに示すことができる技術を提供する。
【解決手段】画像表示システムでは、車両の周辺領域のうちのユーザに同時期に示すべき複数の周辺領域が注目領域として領域選択部によって選択される。そして、注目領域として選択された複数の周辺領域それぞれを示す複数の車両周辺画像が、順次に切り替えてディスプレイの画面D1内の同一の表示領域PAに表示される。このため、これらの複数の車両周辺画像をディスプレイの画面内に同時に並べて表示する必要は無いため、表示する各車両周辺画像のサイズを比較的大きくすることができる。その結果、限られたディスプレイの画面内において、各周辺領域の様子を比較的大きくユーザに示すことができる。
(もっと読む)
画像変換装置及び画像変換システム
【課題】撮像手段から入力された映像データを記憶媒体に一旦全て保存することなく複数の変換結果を出力することが可能な画像変換を可能とする手段を提供することにある。
【解決手段】複数のラインを持つ単一のラインメモリ1003を映像変換手段による読み出し用途と、撮像手段からの画像データの入力用途に役割を入れ替えながら使用する。画像変換手段は、ラインメモリ1003上の入力画像を取得し命令デコーダ1006によって解釈された変換指定手段1009に基づき入力画像の変換を行う。
(もっと読む)
画像表示システム
【課題】画像処理の負荷を軽減することができ、複数の画像の処理および合成して表示可能な画像表示システムを提供する。
【解決手段】画像表示システム10は、4つの車載カメラ11〜14を含んで構成される。4つの車載カメラ11〜14は、後カメラ11を初段に、右カメラ12、前カメラ13および左カメラ14の順に、入力部42〜44と出力部51〜53とが電気接続されることによって電気的に直列に接続される。各画像合成部64は2つの画像を合成して出力し、次に接続される直後段の車載カメラ13,14が、合成した画像と撮像した画像とを合成することになるので、最後段に位置する左カメラ14は、全ての車載カメラ11〜14が撮像した画像を合成して、合成した画像に基づく画像信号を出力する。
(もっと読む)
車両用画像表示装置
【課題】死角の発生を低減した車両用画像表示装置を提供する。
【解決手段】車両の複数個所に配置された複数のカメラを含み、前記車両の周囲を撮影する撮像部と、車両の俯瞰画像を生成する画像生成部と、複数のカメラで撮影した複数の画像を放射状に区分して交互に配置して背景画像を生成し、背景画像と俯瞰画像とを合成する画像合成部と、画像合成部で合成された画像を表示可能な表示部と、を具備する。
(もっと読む)
運転支援装置
【課題】障害物画像および走行予想進路を視認しやすく表示することができる運転支援装置を提供する。
【解決手段】車両後方表示装置10は、ソナー17が障害物20を検出した場合には、進路画像29の表示を停止し、障害物20を検出したことを示す障害物画像30を撮影画像23aに重畳して表示するように演算装置16および描画装置13によってディスプレイ12が制御される。障害物20を検出した場合には、進路画像29を非表示にすることによって走行予想進路がわからなくなるが、車両の進行を妨げる障害物20がある場合には、進路画像29を表示する必要性が低いので、障害物20を検出したことの方が進路画像29を表示することよりも優先すべき事項である。このように優先すべき障害物画像30を表示することによって、障害物画像30を視認しやすくすることができる。
(もっと読む)
運転支援装置
【課題】運転者が障害物の周囲状況を直感的にかつより正確に確認でき、運転者の負担を軽減することができる運転支援装置を提供する。
【解決手段】移動体に設置された複数の撮像手段1001、3001と、撮像手段3001で撮像された画像を、路面モデルを基に撮像手段1001、3001の位置より上方の仮想視点または上方から直交投影の画像に変換する変換手段3008と、複数の撮像手段1001、3001の撮像画像間の視差を基に路面以外の3次元情報を検出する3Dマップ作成手段3007と、前記検出された3次元情報を基に前記視点変換された画像中の像の歪みを補正する3D画像合成手段3008と、前記歪み補正された画像を表示する表示手段3009とを具備する。
(もっと読む)
車両用監視装置
【課題】第1の仮想視点PV1から見た自車21の周囲の死角を減らす。
【解決手段】車両用監視装置は、一つ以上のカメラにより自車周囲の映像を撮像し、自車周囲に形成される曲面CSの形状情報を生成し、自車21の形状情報を読み出し、少なくとも第1の仮想視点PV1を決定し、合成映像を生成して表示する。合成映像を生成する描画部は、先ず、カメラによる映像を前記した曲面CSに投影し、この曲面CSを第1の仮想視点PV1から見た投影画像を生成する。第1の仮想視点から見た、自車の形状を示す自車映像を生成する。カメラによる映像を投影した曲面B1を自車21の車体外板B2に投影し、この車体外板B2を第1の仮想視点PV1から見た二重投影映像を生成する。投影画像、自車映像及び二重投影映像を合成することにより、合成映像を生成する。
(もっと読む)
画像のキャリブレーション方法および装置
【課題】画像のキャリブレーション方法、装置において、校正用指標と車両との相対的な位置関係の厳密度合いを緩和する。
【解決手段】互いに平行で、互いの線間の距離が既知である2本の線とこれらに直交する1本の線とを含む校正用指標20と、校正用指標20を含む周辺領域R1〜R4を撮影する4つのカメラ10と、内部パラメータMにより、周辺領域画像S1〜S4を歪補正画像P1〜P4に補正する歪補正処理部30と、歪補正画像P1〜P4を外部パラメータNにより視点変換合成画像Q0に視点変換処理する視点変換処理部40と、視点変換処理の際のキャリブレーションを行うキャリブレーション処理部50とを備え、キャリブレーション処理部50は内部パラメータMを補正する内部パラメータ補正部51と外部パラメータNを補正する外部パラメータ補正部52とを備える。
(もっと読む)
画像表示システム
【課題】車両の周辺の領域の部分ごとにユーザの所望の光量で照明できる画像表示システムを提供する。
【解決手段】画像表示システム120においては、複数の区分領域をそれぞれ照明する複数の光源がある。変更画面21aを利用することで、これら複数の光源の光量をそれぞれ規定する複数の光量パラメータは、ユーザの操作に基づいて光源ごとに個別に変更することが可能である。したがって、複数の区分領域ごとにユーザの所望の光量で照明することができる。その結果、ユーザにとって見えにくい被写体や、注目すべき被写体を明るくして明瞭に確認することができることになる。
(もっと読む)
車両用画像表示装置
【課題】車両に設けられた複数のカメラにより撮像される画像のうち運転者の意図するカメラの画像を瞬時に選択可能な車両用画像表示装置を提供する。
【解決手段】フロントカメラ3、左サイドカメラ4、右サイドカメラ5、および、リヤカメラ6により撮像された画像を選択的に表示可能な表示手段21を備えると共に、車両を俯瞰するように視点変換を行ったアラウンドビューの画像を生成する画像生成手段23を備え、操作手段27は、その中央領域にアラウンドビューの画像を表示手段21に表示させるための第1スイッチ25を備える共に、中央領域を上方から見た車両の位置として、中央領域の外周に隣接する車両周囲のフロントビュー、リヤビュー、左サイドビュー、右サイドビューに対応した位置に、各ビューの画像を表示手段21に表示させるための第2スイッチ26a〜26dを備えることを特徴とする。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより使用感の良い運転支援画像を表示する運転支援装置を提供する。
【解決手段】撮像手段1で撮像した車両の後方周囲画像から、車両の後方と右後側方および左後側方に対応する部分を切り取って、後方画像と右後側方画像と左後側方画像とを作成し、表示手段3の表示画面に、右後側方画像と左後側方画像は左右に並べて表示し、かつ、これら右後側方画像および左後側方画像と後方画像とを上下に並べて表示している。従って、車両後方周囲を広く表示できると共に、右後側方画像および左後側方画像を必要以上に圧縮して表示しないため、運転者にとって使用感の良い運転支援画像を提供できる。
(もっと読む)
移動距離検出装置及び移動距離検出方法
【課題】移動距離の算出精度を向上させることが可能な移動距離検出装置及び移動距離検出方法を提供する。
【解決手段】移動距離検出措置1は、所定領域を撮像するカメラ10と、カメラ10の撮像画像のデータを入力する計算機30とを備えている。計算機30は、カメラ10による撮像にて得られた所定領域の画像を鳥瞰視される状態へ視点変換し、視点変換された異なる時刻の鳥瞰画像データの位置を合わせる。また、計算機30は、位置合わせされた鳥瞰画像データの差分画像データに基づいて、立体物を検出する。また、計算機30は、視点変換により立体物が倒れ込む方向に沿って、差分画像データ上において所定の差分を示す画素数をカウントして度数分布化することで差分波形を生成し、当該差分波形の時間変化から立体物の移動距離を算出する。
(もっと読む)
駐車支援装置
【課題】駐車支援装置において、駐車白線の前端・後端を認識して、駐車枠に対する車両位置の演算結果から各画像の切替タイミングを決定し、駐車動作の進行に合わせて適切な車両の後方画像を運転者に自動的に提供する。
【解決手段】表示切換制御手段11Cは、白線端点検出手段11Eにより検出された白線前端と車両との距離に基づいて表示手段10に表示する画像を後方画像と俯瞰画像とのいずれかに切り換えるとともに、白線端点検出手段11Eにより検出された白線後端と車両との距離に基づいて表示手段10に表示する俯瞰画像の仮想視点の高さを変える。
(もっと読む)
監視システム
【課題】見やすいフロア図面との合成映像を表示する監視システムを提供することを目的とする。
【解決手段】フロアの監視領域に設けられた一又は複数の監視カメラと、監視カメラにより撮影された画像をフロアの画像に合成して合成画像を生成する画像処理装置と、画像処理装置で生成された合成画像を表示する画像表示装置とを備えた監視システムであって、画像処理装置は、監視カメラの撮影領域に関する位置情報と、フロアの画像及び監視カメラの撮影領域を遮るフロアの構造物に関する位置情報を含むフロアに関する情報とが記憶された位置情報記憶部と、監視カメラの撮影領域に関する位置情報と、監視カメラのフロアに関する情報とに基づいて監視カメラによる撮影画像をフロア画像に合成する合成領域を定める合成領域生成部と、監視カメラによる撮影画像を合成領域に合成して合成画像を生成する画像合成部を有することを特徴とする。
(もっと読む)
車両用周辺監視装置
【課題】車両周辺を撮影した複数の画像を合成して、車両周辺の状況を俯瞰する俯瞰画像を生成すると、障害物が歪んで表示される。
【解決手段】撮影手段30の撮影範囲に向けて設置された障害物検出手段40の出力のうち、所定値を下回る最小の値に対応する位置よりも車両に近い領域は、撮影手段30で撮影した画像を第1仮想画像生成手段50によって、車両を上空の仮想視点から見下ろした第1仮想画像に変換し、障害物検出手段40の出力のうち、所定値を下回る最小の値に対応する位置よりも車両から遠い領域は、撮影手段30で撮影した画像を第2仮想画像生成手段60によって、第1仮想画像と連続する第2仮想画像に変換し、第1画像合成手段90によって、第1仮想画像と第2仮想画像とを合成して、画像表示手段100に表示する。
(もっと読む)
逆変換テーブル生成方法、逆変換テーブル生成プログラム、画像変換装置、画像変換方法、及び画像変換プログラム
【課題】所定の画像に対して視点変換を行う前の画像を取得することを可能とする逆変換テーブル生成方法を提供する。
【解決手段】本逆変換テーブル生成方法は、視点変換画像から当該視点変換画像に係る視点変換処理が行われる前の画像を逆変換画像として生成するための逆変換テーブルT1を生成するための方法であって、制御部11により、視点変換テーブルT2のテーブル座標(a,b)に格納された変換参照座標P(a,b)と逆変換テーブルT1の算出対象のテーブル座標(i,j)との距離L(a,b)を、変換参照座標毎に算出し、視点変換テーブルT2のテーブル座標(a,b)と、このテーブル座標(a,b)に格納された変換参照座標に係る距離L(a,b)と、に基づいて、逆変換テーブルT1の算出対象のテーブル座標(i,j)に格納される逆変換参照座標A(i,j)を算出する。
(もっと読む)
運転支援装置
【課題】本発明は、車両が旋回しながら後退する場合に、運転者の違和感をなくすとともに、旋回方向の画像を表示して運転者に安心感を与えることを目的としている。
【解決手段】このため、後方撮像手段と、後退判定手段と、表示手段と、後方画像から歪み補正して表示画像を作成する画像作成手段とを備える運転支援装置において、旋回角度検出手段と、旋回角度に基づいて遅延時間経過後の車両位置を推定する車両位置推定手段と、推定位置に仮想カメラを設定する仮想カメラ設定手段を備え、画像作成手段は、仮想カメラが視点となるように撮像画像を変換する。また、運転支援装置において、旋回角度検出手段と、車速検出手段と、旋回角度と車速に応じた仮想カメラと真カメラの画像の画素位置の対応関係を示すデータベースを備え、画像作成手段は、旋回角度と車速とに応じてデータベースを参照して仮想カメラが視点となるように撮像画像を変換する。
(もっと読む)
移動体検出装置及び移動体検出方法
【課題】広角の撮像範囲を有するカメラで撮影した非線形画像であっても移動体を検出することができる移動体検出装置を提供する。
【解決手段】車両に搭載され広角の撮像範囲を有するカメラで撮影した非線形画像を、予め設定した視角範囲の複数の画像に分割し共通のカメラ中心をもつ複数の線形な投影平面画像を生成する分割変換部と、複数の投影平面画像のそれぞれの動きベクトルを算出する動きベクトル算出部と、複数の投影平面画像の動きベクトルを解析し、移動体を判定する移動体判定部と、移動体判定部の判定結果を表示する表示部と、を具備する。
(もっと読む)
車両用周囲監視装置
【課題】車両周囲を撮影した複数の画像を合成して、車両周囲の状況を俯瞰する俯瞰画像を生成すると、画像の繋ぎ目で、路面から高さを有する物体に対して死角が生じてしまう。
【解決手段】撮影手段20で撮影された画像の繋ぎ目に、仮想スクリーン設置手段30によって、路面に垂直で車両に対して遠近方向に延びた表裏2面からなる仮想スクリーンを設置し、仮想スクリーン投影画像生成手段40によって、撮影手段20で撮影された画像を仮想スクリーンの表裏面に投影し、仮想スクリーンの上端もしくは下端を支端として、仮想スクリーン展開角度指示手段90によって指定された角度で展開して、画像合成手段80によって、路面投影画像生成手段50で生成した画像を、第2視点変換手段70によって座標変換した画像と合成して、画像表示手段110に表示する。
(もっと読む)
101 - 120 / 695
[ Back to top ]