
Fターム[5C054FD03]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005) | 座標変換 (695)
Fターム[5C054FD03]に分類される特許
41 - 60 / 695
画像生成装置、画像表示システム及び画像生成方法
【課題】車載カメラの撮影状態に異常状態が生じた場合に、異常状態に応じた適切な周辺画像をユーザに提供する。
【解決手段】画像生成装置100は、車両9の側方を撮影するカメラ52が配置されるサイドミラーの格納状態を判定する状態判定部13と、状態判定部でサイドミラーが格納状態であると判定された場合に、カメラ52からの撮影画像のうち少なくとも車両が映り込む第1領域の画像R1を選択し、状態判定部でサイドミラーが展開状態であると判定された場合に、第1領域R1と異なる撮影画像の第2領域R2の画像を選択する画像選択部33と、画像選択部33により選択される画像が配置された表示画像を生成する画像生成部35を備える。
(もっと読む)
画像表示システム

【課題】注意を喚起しながら、障害物がどこにあるかを周辺画像から容易に確認することができる画像表示システムを提供する。
【解決手段】画像表示システム120は、車両に配置されたカメラ51,52,53で得られる撮影画像に基づいて車両及び車両の周囲を仮想視点から見た様子を示す合成画像を生成する合成画像生成部34と、合成画像及び撮影画像を表示画面に表示するナビゲーション装置20と、障害物を検知する障害物検知部15と、障害物を検知した場合、注意を喚起するための注意喚起表示を、表示画面のうちの合成画像を除く部分と、合成画像の周辺部分とのうちの少なくとも一つに付加する表示付加部36と、を備える。
(もっと読む)
車載用表示装置
【課題】給電装置と充電器とが接近した場合においても、給電装置と充電器との位置合わせをする際の案内を行うこと。
【解決手段】車載用表示装置100は、地上の給電装置より非接触方式で車載蓄電池を充電する充電器を有する車輌に搭載される。カメラ101は、車輌の周囲の画像を撮影する。給電装置位置検出部102は、カメラにより撮影した周囲の画像における給電装置の相対位置を検出する。表示部105は、充電器の絶対位置及び給電装置位置検出部102により検出した給電装置の相対位置を、カメラ101により撮影した画像と共に一画面に表示する。
(もっと読む)
駐車支援装置
【課題】車両情報を用いた算出による輪止めの高さの誤差を排して輪止めの高さの算出精度を向上することができる駐車支援装置を提供することを目的とする。
【解決手段】本発明は、後方カメラ3が撮像した画像から輪止めを認識する画像処理プロセッサ10と、認識された輪止めに基づいて輪止めの高さを算出するCPU14と、CPU14の算出結果に基づいて車体と接触するおそれがある輪止めについて警告する警告手段4とを備え、CPU14は、輪止めの上端と下端の鉛直方向からの角度を少なくとも2回算出し、算出角度と撮像手段の取付け高さおよび取付け角度に基づいて輪止めの高さを算出することを特徴とする。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
画像処理装置及び画像処理方法
【課題】高解像度画像を座標変換により変形処理して変形画像を生成する際に、大容量のメモリを不要とし、また、メモリのアクセス速度の低下を軽減する。
【解決手段】画像処理装置200は、入力画像を圧縮して圧縮画像を生成する画像圧縮部210と、圧縮画像を格納する記憶部220と、座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算部250と、記憶部220に格納された圧縮画像を、座標情報に基づいて座標変換して読み出すことで、圧縮変形画像を生成する圧縮画像変形部230と、圧縮変形画像を伸長する画像伸長部230を有している。ここで、画像圧縮部210では、入力画像の少なくとも輝度信号(Y)について、ブロック分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮画像を生成する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺を見下ろした合成画像として表示することのできる領域を広げ、運転者に車両周辺の状況を十分に認識させることのできる車両周辺監視装置を提供する。
【解決手段】画像処理手段2は、車載カメラ1a〜1dにより撮像された複数の撮像画像に基づいて仮想視点から車両A周辺を見下ろした合成画像を生成するものであって、また、合成画像として表示手段3が表示する車両A周辺の領域を車両Aの走行状況に応じて変更するものであるため、表示手段3が表示する車両A周辺の領域は所定の領域に固定されず、運転者は車両Aの走行状況に応じた広い領域を表示手段3の表示で視認することができるため、車両A周辺の状況を十分に認識することができる。
(もっと読む)
表示装置
【課題】高さ方向に立体物が表示されない領域をドライバに提示してドライバに注意喚起を促す表示装置を提供することを目的とする。
【解決手段】車両周囲を撮像する複数の撮像手段1と、撮像手段1から取得した撮像映像に基づいて俯瞰映像を作成し、この俯瞰映像に死角エリアを重畳する映像処理ユニット2と、この映像処理ユニット2によって死角エリアが重畳された重畳映像を表示する表示手段3とを備え、映像処理ユニット2は、路面からの高さに応じて異なる死角エリアを俯瞰映像に重畳することを特徴とする。
(もっと読む)
車両後方監視装置
【課題】運転中に切替操作等を行うことなく、後方運転中の状況に適した画像を表示することができる車両後方監視装置を提供する。
【解決手段】車両に搭載されたリアカメラ2で撮像された車両後方の画像に画像処理を施すことにより頂上視野画像又は斜め視野画像を生成して画像出力手段4に表示する。変速機により選択されたギヤがバックギヤであることをギヤ検出手段15が検出した場合には、画像切替手段8により画像出力手段4に予め設定された頂上視野画像又は斜め視野画像を表示させ、ギヤ検出手段15によりバックギヤが解除されたことを検出した後に再度バックギヤであることを検出した場合には、画像切替手段8により画像出力手段4にバックギヤが解除される以前の画像である頂上視野画像又は斜め視野画像、又は任意の画像を表示するように設定する画像表示制御手段6を備える。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】複数の画像を効率よく処理する画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】複数の画像取得部は各々画像を取得し、車両情報取得部は車両の移動状態を示す車両情報を取得し、画像補正量算出部は複数の画像取得部のうち1つの画像取得部が取得した第1の画像と、他の画像取得部が取得した第2の画像との位置関係に基づき画像補正量を算出し、画像補正値算出部は、車両情報に基づいて推定した位置関係に基づき当該画像補正量を算出する。
(もっと読む)
移動体画像追尾装置
【課題】付加センサを追加せず、追尾性能の劣化を改善する。
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
車線認識装置及び車線認識方法
【課題】ノイズを区画線と判断する誤りを低減する技術を提供する。
【解決手段】車線認識装置は、時系列的な複数の原画像を入力する。その原画像の各々に対して、路上に描かれた区画線の候補となる候補位置が検出され、区画線候補位置履歴として蓄積される。時系列的な複数の原画像を合成することによって合成鳥瞰画像が作成される。所定の時点での合成鳥瞰画像の候補位置を中心として、区間線候補位置履歴が最も多数蓄積されている方向が、区画線が描かれている可能性が高い領域として推定される。より正確な区画線候補を狙った探索領域を設定することにより、ノイズを除外できる。
(もっと読む)
画像処理装置、画像処理システム、及び画像処理方法
【課題】俯瞰画像における撮像画像の不連続性による影響を抑制する。
【解決手段】画像処理装置は、車両の進行方向またはその反対方向に対応する第1の撮像画像と、前記車両の進行方向軸と交差する方向に対応する第2の撮像画像の重複領域に含まれる物体の位置を検出し、前記第1の撮像画像に、前記物体が第1の位置にあるときに第1の評価値、前記車両の進行方向軸からの距離がより大きい第2の位置にあるときに前記第1の評価値より小さい第2の評価値を割り当て、前記第2の撮像画像に、前記物体が前記第1の位置にあるときに第3の評価値、前記第2の位置にあるときに前記第3の評価値より大きい第4の評価値を割り当て、前記評価値が大きい方の撮像画像に前記物体が含まれるように境界を決定して、前記第1、第2の撮像画像をつなぎ合わせるので、撮像画像の不連続性を抑制できる。
(もっと読む)
運転支援装置および車両
【課題】Uターン開始後にも運転者の心理負担の増大を抑制する運転支援装置および車両を提供することを目的とする。
【解決手段】運転支援装置1は、入力された自車両周辺の撮像画像を記憶する第1記憶手段9と、この第1記憶手段9に記憶した撮像画像に基づいて自車両が切り返しをせずにUターン可能であるか否かを示すガイド画像を表示手段8に出力する画像処理手段11とを備え、画像処理手段11は、自車両がUターン動作開始前に、前方とUターン方向の側方を含む第1のガイド画像を表示手段8に出力し、自車両がUターン動作開始後に、前方とUターン方向と逆の側方を含む第2のガイド画像を表示手段8に出力することを特徴とする。
(もっと読む)
並走体検出装置及び並走体検出方法
【課題】並走体の位置検出精度について向上を図ることが可能な並走体検出装置及び方法を提供する。
【解決手段】並走体検出装置1は、カメラ10にて得られた自車両Vの後側方側の異なる時刻の検出領域の画像を、鳥瞰視上で位置を合わせると共に、位置合わせされた異なる時刻の画像データの差分画像データに基づいて、並走体と地面との境界となる接地線を検出する計算機50を備えている。また、計算機50は、差分画像データに対して自車両Vの移動方向と略平行な複数の線をそれぞれ異なる位置に設定し、差分画像データのうち、設定した略平行な複数の線それぞれの自車両Vの遠方側におけるデータに対し、検出領域の画像を鳥瞰視に視点変換した際に並走体が倒れ込む方向に沿って、所定の差分を示す画素数をカウントして度数分布化することで複数の差分波形を生成し、生成した複数の差分波形の形状変化から並走体の接地線を検出する。
(もっと読む)
車両用周辺監視装置
【課題】表示視野範囲に応じて、検出移動体の検知枠の表示・非表示を最適化した車両用周辺監視装置を提供する。
【解決手段】車両周辺の撮像画像を取得する撮像部(カメラ)12と、前記撮像画像に基づき、移動体を検出する移動体検出部52と、移動体検出部52で検出された移動体を囲む検知枠を生成する検知枠生成部54と、表示部30と、前記撮像画像に対し前記検知枠を重ね合わせて表示部30に表示させる表示処理部56と、を備え、表示処理部56は、表示視野範囲の切り替えに応じて、検知枠の表示と非表示とを切り替える。
(もっと読む)
周辺監視装置
【課題】周辺監視装置の最終出力画像において、被写体が歪むことを抑制すること。
【解決手段】周辺監視装置では、一台のカメラで撮像した撮像画像を取得し(S120)、鳥瞰画像へと変換して記憶する(S150)。さらに、時間軸に沿った複数の鳥瞰画像を合成して一枚の鳥瞰画像(即ち、合成画像)を生成する(S160)。その後、障害部検出センサにて検出した同一障害物の外郭における地点の時間軸に沿った履歴から障害物の輪郭を推定し(S210)、その輪郭を境界とし、合成画像において、障害物が占有する領域よりも大きな領域である対象領域を特定する(S220)。そして、その特定した合成画像の対象領域について、該対象領域を構成する各撮影画像を撮影した時点に存在したカメラ10の中心位置に向かう方向に沿って圧縮することで、最終出力画像を生成する(S230)。
(もっと読む)
車両周辺監視装置
【課題】カメラの取り付け位置に応じて、カメラ毎に最適な視野と解像度の領域設定を行うこと。
【解決手段】複数のカメラ1〜4は、それぞれ広角レンズ11〜41と撮像素子12〜42と信号処理部13〜43を有する。画像処理部5は、複数のカメラが出力する複数の撮影画像14〜44に対し画像処理を行い、モニタ6へ表示する。複数のカメラから出力され画像処理部5で処理される複数の撮影画像のうち少なくとも1つの撮影画像24は、広角レンズ21のレンズ歪みの中心Pが撮影画像24の中心Qから所定量d’だけ変位するように設定する。
(もっと読む)
画像生成装置、画像生成方法、及びコンピュータプログラム
【課題】 切出し範囲を移動させつつ全周囲画像から切出し範囲の画像を切出して平面画像を生成するにあたり、演算量やメモリアクセスを軽減できる画像生成装置を提供する。
【解決手段】 歪みを有する全周囲画像から切出した切出し範囲について平面画像を生成する画像生成装置1は、全周囲画像を取得する全周囲画像取得部11と、全周囲画像中の切出し範囲を指定する切出し範囲指定部14と、切出し範囲から過去の平面画像を再利用できる再利用領域と、過去の画像を再利用できない新規領域とを求める再利用領域計算部17と、過去の平面画像を蓄積するための平面画像蓄積部20と、全周囲画像の新規領域に対して歪み補正を行う歪み補正部18と、平面画像蓄積部20に蓄積された平面画像中の再利用領域の画像と、歪み補正部にて歪み補正された新規領域の画像とを合成することで、平面画像を生成して、平面画像蓄積部20に出力する合成部19とを備えている。
(もっと読む)
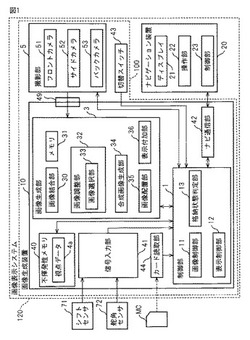
画像処理装置、画像表示システム、及び、画像処理方法
【課題】メモリへの画像の書き込みの異常を検出する。
【解決手段】画像表示システム200においては、データ付与部22が、フレームメモリ23に書き込む前の画像に対して、時間的に隣り合う画像とは異なる検査用データを付与する。一方、異常検出部24は、フレームメモリ33から周期的に読み出された画像に付与された検査用データの更新状態に基づいて異常を検出する。フレームメモリ23への画像の書き込みの異常があればこの検査用データが更新されないため、画像の書き込みの異常を容易に検出することができる。
(もっと読む)
41 - 60 / 695
[ Back to top ]