
Fターム[5C054FD03]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005) | 座標変換 (695)
Fターム[5C054FD03]に分類される特許
121 - 140 / 695
移動体検出装置及び移動体検出方法
【課題】広角の撮像範囲を有するカメラで撮影した非線形画像であっても移動体を検出することができる移動体検出装置を提供する。
【解決手段】車両に搭載され広角の撮像範囲を有するカメラで撮影した非線形画像を、予め設定した視角範囲の複数の画像に分割し共通のカメラ中心をもつ複数の線形な投影平面画像を生成する分割変換部と、複数の投影平面画像のそれぞれの動きベクトルを算出する動きベクトル算出部と、複数の投影平面画像の動きベクトルを解析し、移動体を判定する移動体判定部と、移動体判定部の判定結果を表示する表示部と、を具備する。
(もっと読む)
車両用周囲監視装置

【課題】車両周囲を撮影した複数の画像を合成して、車両周囲の状況を俯瞰する俯瞰画像を生成すると、画像の繋ぎ目で、路面から高さを有する物体に対して死角が生じてしまう。
【解決手段】撮影手段20で撮影された画像の繋ぎ目に、仮想スクリーン設置手段30によって、路面に垂直で車両に対して遠近方向に延びた表裏2面からなる仮想スクリーンを設置し、仮想スクリーン投影画像生成手段40によって、撮影手段20で撮影された画像を仮想スクリーンの表裏面に投影し、仮想スクリーンの上端もしくは下端を支端として、仮想スクリーン展開角度指示手段90によって指定された角度で展開して、画像合成手段80によって、路面投影画像生成手段50で生成した画像を、第2視点変換手段70によって座標変換した画像と合成して、画像表示手段110に表示する。
(もっと読む)
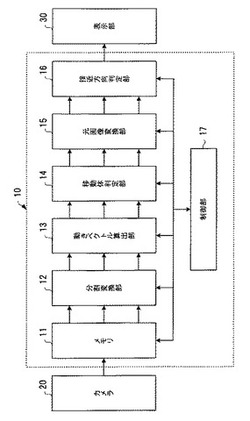
映像表示装置及び映像表示方法
【課題】俯瞰映像を表示させる場合であっても、当該俯瞰映像における障害物との相対位置と、実際の障害物との相対位置との相違を同一画面上で確認させる。
【解決手段】車両周囲の異なる方向を撮像方向とした複数のカメラから取得した、画像変換が行われていない複数の直接映像110を用いて、車両周囲の状況を運転者に提示するために、映像処理部により、複数の直接映像110を取得し、当該複数の直接映像110を用いて車両周囲を一覧させる俯瞰映像100を作成し、障害物検知部によって自車両に近接する障害物を検知した時に、制御部によって、俯瞰映像100と、障害物の自車両に対する方向を撮像した直接映像110とを同時に表示させる。
(もっと読む)
車両周辺映像表示装置
【課題】一部の撮像画像に影が含まれていることによる合成画像全体の輝度低下を防ぐことができる車両周辺映像表示装置を提供する。
【解決手段】車両周辺を撮像する各カメラ1a〜1dによる複数の撮像画像に基づいて生成された単一の合成画像に影が含まれているか否かを判定し、影が含まれていると判定した場合には合成画像を構成する複数の撮像画像の中から影が含まれている画像を特定する影判定部15と、影判定部15が影が含まれている画像を特定した場合、影が含まれている画像を除いた残りの撮像画像の平均輝度に基づいて撮像画像毎の輝度を調整する調整部5a〜5dと、輝度の調整が行われた後の撮像画像に基づいて生成された合成画像を表示する表示手段3と、を有する。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより視認性の良好な運転支援画像を表示する運転支援装置を提供する。
【解決手段】撮像手段1で撮像した車両の後方周囲画像から仮想視点画像と後方視点画像とを作成し、仮想視点画像の一部からなる近距離画像と後方視点画像の一部からなる遠距離画像とが上下に表示されるよう画面合成し運転支援画像として表示手段3に表示する。表示手段3における近距離画像と遠距離画像との画像境界を、表示手段3の中央部に対し両端部を上側に移動可能としたことにより、近距離画像の画面中央部より画面両端部の画面範囲を広くすることができる。従って、運転者が運転動作を行っている際に、車両周囲に存在する障害物をいち早く認識できるため、運転者にとって使用感の良い運転支援画像を提供することができる。
(もっと読む)
駐車支援システム、ナビゲーション装置
【課題】駐車場において複数の駐車区画が駐車可能である場合に、適切な駐車区画を対象として駐車支援を行う。
【解決手段】ナビゲーション装置1の制御部10において、自車両が駐車場において駐車しようとしているか否かを判断し、駐車しようとしている場合は、各カメラ2に対して、各カメラ2の動作を制御するための制御信号を出力する。そして、各カメラ2から出力される画像信号を受信して自車両の周囲の撮影画像を取得し、これに基づいて、自車両の全周囲を俯瞰した様子を示すアラウンドビュー画像を合成する。アラウンドビュー画像においてユーザが入力装置17の操作によりいずれかの空き駐車区画を指定すると、その駐車区画を対象として自車両の駐車支援を行う。
(もっと読む)
車両用視認支援装置
【課題】簡単な構成で運転者に車外情報を容易かつ適正に視認させることができる車両用視認支援装置を提供する。
【解決手段】車外の情景を撮影する撮像手段7と、撮影された車外情景のデータおよび車両の形状データに基づいて運転者の死角となる領域の画像を表示画像として生成する表示画像生成手段とを備えるとともに、該表示画像生成手段により生成された表示画像を表示する表示部11が車室内に設けられた車両用視認支援装置であって、上記表示画像生成手段は、運転者の死角となる領域とその周辺領域とを含む領域の画像を表示画像として生成するとともに、該周辺領域を含んだ表示画像を上記表示部11に表示させるように構成された。
(もっと読む)
狭路走行支援装置
【課題】自車両前方の障害物が自車両側方付近に移動する際の自車両と障害物との連続的な相対位置関係を、運転者に容易かつ即座に把握させることができる狭路走行支援装置を提供する。
【解決手段】自車両前方の領域を表示する第一の表示画像10を作成する第一の表示画像作成部と、自車両の左右側面17,16の領域を表示する第二の表示画像15を作成する第二の表示画像作成部と、第一の表示画像10の下方または車両進行方向後方に第二の表示画像15を並べて配置すると共に、第二の表示画像15に表示される自車両の左右側面17,16の車幅方向端部から自車両の進行方向前方に延びる左右自車幅相当延長線14,13を第一の表示画像10と第二の表示画像15とに連続して表示する画像合成部と、を備えた。
(もっと読む)
車載カメラ用キャリブレーション装置
【課題】背景の光環境や照明環境が悪いと、カメラのキャリブレーションを行うために撮影する基準マーカが、高いコントラストで画像化されず、これによってカメラのキャリブレーションが正確に行えない。
【解決手段】撮影手段20で撮影された画像に写っている基準マーカ10を含む領域が領域特定手段30によって特定され、コントラスト算出手段40によって、特定された領域の中のコントラストに対応する値が算出され、算出されたコントラストに対応する値が所定値よりも小さいとき、露出変更手段60によって撮影手段20の露出を変更して撮影を行い、特定された領域の中のコントラストに対応する値が、所定値よりも大きい画像を撮影して、撮影された画像を用いて、キャリブレーション実行手段70にてカメラのキャリブレーションを行う。
(もっと読む)
運転支援表示装置
【課題】車両後方、又は前方の、前、左右、及び下方向の広い範囲の撮像から表示において、目的に応じた視認性の高い被写体の形状表示、被写体と車両の方向性や位置関係の視認性向上、及び画面上で移動する被写体に対する目線の移動を容易にする運転支援表示装置を提供する。
【解決手段】車両前後方向、車両前後方向から垂直に下の方向、水平に左の方向、水平に右の方向、にそれぞれ垂直な平面上の正方形の被写体が、各方向に対応した領域内で同じ大きさの正方形又は長方形に表示される前方向補正画像表示領域41−1と他の表示領域が隣接配置され、隣接付近の表示画像は一致し、水平な地面に垂直或いは車両左右方向の直線と一致する直線である。更に、左方向補正画像表示領域41−3L、又は右方向補正画像表示領域41−3Rの下辺と、下方向補正画像表示領域41−2の左辺、又は右辺は同じ位置の車両前後方向直線と一致する直線である。
(もっと読む)
画像生成装置及び操作支援システム
【課題】旋回動作時の周辺監視に適した出力画像を生成する画像生成装置を提供すること。
【解決手段】旋回動作可能な被操作体60に取り付けられた撮像手段2が撮像した入力画像に基づいて出力画像を生成する画像生成装置100は、被操作体60を取り囲むように配置される空間モデルMDであり、中心軸を有する柱状の空間モデルMDにおける座標と、その入力画像が位置する入力画像平面R4における座標とを対応付ける座標対応付け手段10と、空間モデルMDにおける座標を介して、入力画像平面R4における座標の値とその出力画像が位置する出力画像平面R5における座標の値とを対応付けて出力画像を生成する出力画像生成手段11と、を備え、空間モデルMDは、撮像手段2の光軸Gが空間モデルMDの中心軸と交差するように配置される。
(もっと読む)
複数カメラ画像使用車外表示装置
【課題】複数カメラによって車両外部を撮影し、画像合成を行い、或いは単独カメラの撮影画像表示を行うとき、複数カメラによる重複撮影範囲について、不適正な画像を表示しているカメラの白線障害物画像の代わりに他の適正撮影カメラの白線障害物画像で補間することができる「複数カメラ画像使用車外表示装置」とする。
【解決手段】複数のカメラが互いに重複撮影している部分で、片方のカメラに水滴が付着した時の特有の画像を検出した時、または一方の画像には一連の白線障害物画像が表示されているのに対して、他方のカメラでは一部或いは全部の欠如、或いは所定以上の変形がある時、更には互いのカメラ撮影画像を比較して所定以上異なっていることを検出し、片方のカメラが不適正な画像を出力していることを確認した時、それらのカメラを不適正撮影カメラとして特定し、適正撮影カメラの白線障害物画像をその部分に補間して表示する。
(もっと読む)
画像情報提供装置および画像情報提供方法
【課題】提供される画像情報から、ユーザが車両に生じている異常を容易に認識するができるように画像情報を作成する。
【解決手段】カメラ11a〜11dから出力される画像がマッピングされた三次元空間のモデルSMを視点変換することにより、車両周囲画像を作成する。視点変換を行う際には、車両Caに生じている異常の検出結果に基づいて、車両周囲画像に車両Caに生じている異常が含まれるように仮想視点の計算を行う。
(もっと読む)
画像生成装置及び操作支援システム
【課題】複数のカメラの設置位置や光軸方向に適した空間モデルを用いて出力画像を生成する画像生成装置を提供すること。
【解決手段】画像生成装置100は、ショベル60を取り囲むように配置される空間モデルMDにおける座標と、三つのカメラのそれぞれに対応する三つの入力画像平面における座標とを対応付ける座標対応付け手段10と、空間モデルMDにおける座標を介して、それら三つの入力画像平面における座標の値と出力画像平面における座標の値とを対応付けて出力画像を生成する出力画像生成手段11とを備え、空間モデルMDは、空間モデル部分MD1、MD2の組み合わせであり、空間モデル部分MD1、MD2のそれぞれは、基準軸を有し、隣り合う一対のカメラに対応し、それら一対のカメラのそれぞれの光軸がその基準軸と交差するように配置される。
(もっと読む)
処理対象画像生成装置、処理対象画像生成方法、及び操作支援システム
【課題】出力画像の柔軟な調整を可能にする処理対象画像生成装置を提供すること。
【解決手段】
撮像手段2が撮像した入力画像に基づいて、出力画像を得るための画像変換処理の対象となる処理対象画像を生成する処理対象画像生成装置100は、入力画像が位置する入力画像平面R4における座標と、その入力画像が投影される空間モデルMDにおける座標と、その処理対象画像が位置する処理対象画像平面R3でありその空間モデルMDに投影された画像が再投影される処理対象画像平面R3における座標とを対応付ける座標対応付け手段10を備える。
(もっと読む)
車載カメラ校正システム及びコンピュータプログラム
【課題】特定の路面標示や、予め記憶した路面標示の特徴量を必要とすることなくカメラの校正を行える「車載カメラ校正システム及びコンピュータプログラム」を提供する。
【解決手段】カメラ1で撮影した二つ画像フレームから特徴点を抽出し、同じ地点を表す特徴点のペアにペアリングする。画像フレーム上の座標と、当該画像フレーム上の座標に写り込む地点の前記自動車に固定された世界座標系上の座標との、カメラ姿勢を変数として用いた関係式に従って、前記ペアにペアリングされた二つの特徴点の前記画像フレーム上の座標を用いて示される、当該ペアにペアリングされた二つの特徴点が表す地点の世界座標系上の移動量と、自動車の車速から算出した当該自動車の移動量Dyに対する誤差の、各ペアについての総和が最小となるように、カメラの姿勢を算出する。
(もっと読む)
車外撮影画像表示システム
【課題】 障害物の検出距離に応じて表示角度を変化させた場合に、画面変化後にその変化内容を容易に把握することができる車外撮影画像表示システムを提供する。
【解決手段】 障害物までの距離を検出し、カメラ5aにより撮影された広角の撮影画像内から、その距離が近づくほど画角が広がるように抽出された表示画像をディスプレイ7に表示する車外撮影画像表示システム1000において、ディスプレイ7に表示中の表示画像100上に、当該表示画像100の画角を認識可能となるようその画角に対応した角度範囲を図形表示した画角図形200を、その画角の変化を反映した形で動的に表示させる。
(もっと読む)
画像生成装置、画像表示システム及び画像生成方法
【課題】合成画像における視認性が悪い被写体像をユーザが視認する機会を低減する。
【解決手段】画像表示システムでは、補助照明部が発光している場合は補助照明部が発光していない場合よりも、ディスプレイに表示される合成画像CP1,CP2に被写体像として含まれる車両の周辺の領域の範囲を狭くする。このため、補助照明部で照明されない領域に存在する物体の被写体像をユーザが視認する機会を低減できる。
(もっと読む)
カメラ姿勢パラメータ推定装置
【課題】広角カメラの姿勢パラメータを容易にかつ正確に推定する技術を実現する。
【解決手段】カメラ姿勢パラメータ推定装置は、半球以上の視野を有する広角カメラにより得られる広角画像から、実空間における、相互に平行な少なくとも2つの第1直線及び第2直線と、第1直線及び第2直線と垂直な関係を有する1つの第3直線とから構成される特定パターンを形成し得る各線分をそれぞれ取得するパターン取得手段と、このパターン取得手段により取得された特定パターンを形成し得る各線分を用いて上記広角画像に対する2組の消失点ペアを決定する決定手段と、この決定手段で決定された2組の消失点ペアを用いて地面に対する広角カメラの姿勢パラメータを推定する推定手段と、を備える。
(もっと読む)
車両周囲監視装置および車両周囲監視方法
【課題】高精度の障害物検出を低コストで実現する事ができる車両周囲監視装置を提供する事。
【解決手段】車両周囲監視装置100は、車両の車載カメラによる撮影画像に対して画像認識を行い、撮影画像とは別の基準カメラで障害物を撮影して得られた基準画像との間の形状の一致性に基づいて車両の周囲の障害物の検出を行う装置であって、撮影画像を、基準カメラの視点に対応する位置から見たときの見え方に近似した画像に変換する画像変換部140と、変換された撮影画像に対して基準画像に基づく画像認識を行い、障害物の検出を行う画像認識部150とを有する。
(もっと読む)
121 - 140 / 695
[ Back to top ]