
Fターム[5F031FA01]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送の形態 (16,275) | ウエハ(ダミーも含む)の移送 (2,963)
Fターム[5F031FA01]に分類される特許
141 - 160 / 2,963
真空処理装置及びプログラム
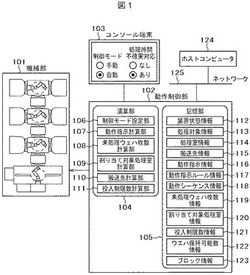
【課題】処理室が連結されている搬送機構部に、複数の搬送ロボットが配され、複数の搬送ロボット間で被処理体の受け渡しが行われる線形ツールの真空処理装置で、処理に要する時間が安定しない状況下において、効率の良い搬送の制御方法を提供する。
【解決手段】処理室毎に、処理中、及びその処理室へ搬送中の未処理ウェハの枚数を数え、その未処理ウェハの枚数が投入制限数と同じか、それ以上であったら、ウェハの搬送先を決定する際に、その処理室を除いて搬送先を決定する事を特徴とする。
(もっと読む)
剥離装置および剥離方法

【課題】簡単な構成で処理能力を向上できる剥離装置および剥離方法を提供すること。
【解決手段】
剥離装置1は、第1面W1が第1接着シートS1の一方の面に貼付されてフレーム部材としての第1リングフレームRL1に支持されるとともに、第2面W2が第2接着シートS2の一方の面に貼付された板状部材としてのウェハWから第1接着シートS1を剥離するものであり、第2接着シートS2の他方の面側に接する支持面21で第2接着シートS2を支持する第2シート支持手段2と、第2シート支持手段2をウェハWの第1面W1と平行な方向に移動可能な移動手段3と、第1接着シートS1にウェハWから離間する方向に剥離力を付与可能な剥離力付与手段5と、第1接着シートS1が剥離されたウェハWを回収する回収手段6と、を備えている。
(もっと読む)
物体交換システム、露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び物体交換方法
【課題】基板ステージ上の基板の交換を迅速に行う。
【解決手段】基板ステージ20aは、基板ホルダ30aから加圧気体を噴出して基板P1を浮上させ、基板搬出装置93は、基板ホルダ30aの上面(基板載置面)をガイド面として基板P1を水平面に沿って移動させることにより基板ホルダ30aから搬出する。次に露光予定の別の基板P2は、基板P1の搬出動作が行われる際、基板ホルダ30aの上方に待機しており、基板P1の搬出動作完了後に基板ステージ20aが有する数の基板リフト装置46aに受け渡される。
(もっと読む)
物体搬出方法、物体交換方法、物体保持装置、物体交換システム、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法
【課題】基板ステージ上の基板の交換を迅速に行う。
【解決手段】 基板ステージ20aは、基板ホルダ30aから加圧気体を噴出して基板P1を浮上させ、基板ホルダ30aに内蔵された基板搬出装置70aを用いて、基板ホルダ30aの上面(基板載置面)をガイド面として基板P1を水平面に沿って移動させることにより基板ホルダ30aから搬出する。このため、基板P1に対する露光処理が終了した後、基板交換のために基板ステージ20aを基板交換位置に位置させる前に基板P1の搬出動作を開始することができる。次に露光予定の別の基板P2は、基板P1の搬出動作が行われる際、基板ホルダ30aの上方に待機しており、基板P1の搬出動作完了後に基板ステージ20aが有する数の基板リフト装置46aに受け渡される。
(もっと読む)
基板搬送装置、これを備える塗布現像装置、及び基板搬送方法
【課題】基板を保持して搬送する基板保持部の位置を検出することにより、基板の搬送を監視することができる基板搬送装置を提供する。
【解決手段】基板を支持する支持部を含む搬送機構と、ラインセンサ、及び該ラインセンサに光を照射する光源を含み、前記搬送機構が動作して前記支持部が移動したときに前記光が前記支持部により遮られ得るように配置される位置検出部と、前記ラインセンサからの信号に基づいて、前記搬送部の位置を検出する制御部とを備える基板搬送装置が提供される。
(もっと読む)
ロボットシステム
【課題】ウエハを多段に収納するカセット内のウエハを安全に取り出すこと。
【解決手段】進入可否判定部が、移載対象となるウエハの直下および直上のクリアランスに基づいてハンドが進入可能であるか否かを判定する。そして、進入可否判定部によって進入可能であると判定されたならば、位置補正部は、ハンドの最終的な進入位置を、マッピングされた収納位置に基づいて算出し、算出した進入位置に基づいてロボットを制御するようにロボットシステムを構成する。
(もっと読む)
基板処理装置、基板処理方法及び記憶媒体
【課題】実運転に近い条件で、効率的に試運転を実行可能な基板処理装置等を提供する。
【解決手段】搬送容器(FOUP1〜4)から基板Wを取り出して処理モジュール2にて処理を行い、元の搬送容器に戻す基板処理装置1において、選択部31は、基板搬送機構15、17や処理モジュール2の動作確認運転を行うモードの選択を受け付け、ジョブ設定部32は、動作確認用の複数のコントロールジョブ(CJ)を設定すると共に、基板Wに対して実行されるレシピであるプロセスジョブ(PJ)をCJ毎に設定し、制御部3は、順番が相前後する2つのCJのPJが並列で実行可能か判断する。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体及び基板処理システム
【課題】基板を露光処理する前に、各種の処理モジュールにより基板に各種の処理を行う際に基板に発生した塵埃が、露光装置の基板保持機構の接触部に付着することを防止できる基板処理方法を提供する。
【解決手段】回転可能に保持した基板に形成されている切欠部の回転角度位置が基準位置から所定範囲内になるように位置合わせする位置合わせ工程と、位置合わせされた基板を所定の処理を行う基板処理部23に搬送し、基板処理部23に設けられた第1の接触部82と接触させることによって基板を保持する第1の保持工程と、基板に所定の処理を行った後、基板を露光装置に搬送し、露光装置に設けられた第2の接触部と接触させることによって基板を保持する第2の保持工程とを有する。第1の接触部82は、回転角度位置が所定範囲内のとき、基板が第1の接触部82に接触する領域が、基板が第2の接触部に接触する領域と重ならないように設けられている。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】加熱処理を伴う被処理基板と支持基板との剥離処理の際に、被処理基板の非接合面の酸化を抑制する。
【解決手段】剥離装置30は、加熱機構128を備え、且つ被処理ウェハWを保持する第1の保持部110と、加熱機構151を備え、且つ支持ウェハSを保持する第2の保持部111と、少なくとも第1の保持部110又は第2の保持部111を相対的に水平方向に移動させる移動機構170と、第1の保持部110の外周部に沿って環状に設けられ、且つ複数の孔が形成され、被処理ウェハWを保持した第1の保持部110の外周部に対して不活性ガスを水平に供給するポーラスリング130と、を有している。第1の保持部110において被処理ウェハWを保持するポーラス121の保持面121aの径は、被処理ウェハWの径よりも小さい。
(もっと読む)
ウェハキャリア用治具
【課題】手動にて、ウェハをウェハキャリアに収納する場合もしくはウェハキャリアから取り出す場合において、ウェハ同士の接触を防ぎ、疵やチッピングの発生を防止する。
【解決手段】ウェハキャリア用の治具であって、ウェハキャリア11が備える複数のスロット12の数に対応し、スロット12の並び間隔と等しい間隔で平行な状態で固定されたウェハ保護プレート群20からなり、各ウェハ保護プレート21は、スロット12内に収納されるウェハ10の直径以下の幅を有しスロット12に差し込まれる挿入部22と、挿入部22の幅方向に延びてスロット12の開口面15に接する一対のストッパー部23とを有し、挿入部22が隣り合うウェハ10同士の接触を防ぎ、疵やチッピングの発生を防止することを特徴とするウェハキャリア用治具1。
(もっと読む)
剥離方法、プログラム、コンピュータ記憶媒体、剥離装置及び剥離システム
【課題】加熱処理を伴う被処理基板と支持基板との剥離処理の際に、被処理基板の表面の酸化を抑制する。
【解決手段】第1の保持部と前記第2の保持部との間の処理空間内であって、当該第1の保持部と第2の保持部に接触しない位置に、昇降機構によって重合ウェハを配置し、ガス供給管から処理空間内に不活性ガスを供給する(工程A1)。その後、移動機構によって第2の保持部を上昇させて、第1の保持部で被処理ウェハを保持すると共に、第2の保持部で支持ウェハを保持する(工程A2)。その後、第1の保持部に保持された被処理ウェハと第2の保持部に保持された支持ウェハとを加熱しながら、移動機構によって第2の保持部を水平方向に移動させて、被処理ウェハと支持ウェハを剥離する(工程A3)。その後、第1の保持部からベルヌーイチャックに受け渡された被処理ウェハに対して不活性ガスを供給する(工程A4)。
(もっと読む)
基板処理装置、基板処理装置制御プログラム、及び半導体装置の製造方法
【課題】待機中の基板収容器内の基板に対し、基板表面へのパーティクルの付着等の問題を抑制することができる基板処理装置を提供する。
【解決手段】基板を複数収容した基板収容器を複数載置する載置台と、前記載置台に載置された基板収容器の蓋を開閉する蓋開閉部と、蓋を開けられた基板収容器内の基板の有無又は位置を確認する基板確認を行う基板確認部と、基板収容器内の基板を処理室へ搬送する基板搬送機構と、前記基板搬送機構により搬送された前記処理室内の基板に対して処理を行う基板処理部とを備えた基板処理装置において、前記載置台に載置された第1の基板収容器内の基板を対象として基板処理中に、第2の基板収容器が前記載置台に載置された場合、前記第2の基板収容器の蓋を開けて、前記第2の基板収容器内の基板に対して前記基板確認部による基板確認を行った後に、前記第2の基板収容器の蓋を閉じる。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
ローディングユニット及び処理システム
【課題】不活性ガスの使用量を大幅に削減し、冷却効率も向上させることが可能なローディングユニットを提供する。
【解決手段】基板Wを複数枚保持した基板保持具56を処理容器46に対して昇降させるローディングユニット16において、ローディング用筐体68と、基板保持具を昇降させる昇降エレベータ機構66と、処理容器の開口部を閉じるシャッタ部86と、基板の移載を行うための基板移載機構72と、昇降エレベータ機構を囲み、この移動範囲を囲むようにして設けられた第1の区画箱90と、第1の区画箱に連結され、基板移載機構とこの移動範囲を囲むようにして設けられた第2の区画箱92と、第1の区画箱に連結され、シャッタ部を囲むようにして設けられた第3の区画箱94とを備え、第1の区画箱には、第1の区画箱の内側に対して冷却ガスを噴射する冷却ガス噴射手段96が設けられている。
(もっと読む)
ワーク搬送装置及びワーク加工装置
【課題】コンパクトな構成でワークを汚すことなく搬送することができるワーク搬送装置及びワーク加工装置を提供する。
【解決手段】移動可能な第1アーム60には、ウェーハ把持機構72と、第1吸着保持機構74とが備えられる。また、移動可能な第2アーム66には、トレイ76と位置決め機構78と、第2吸着保持機構80とが備えられる。カセットCに格納されたウェーハWは、縁部をウェーハ把持機構72に把持されてカセットCから引き出され、トレイ76の上に載置される。トレイ76に載置されたウェーハWは、位置決め機構78によって位置決めされた後、第1吸着保持機構74によって吸着保持されて、ワークテーブル30に搬送される。加工後、ウェーハWは第2吸着保持機構80に吸着保持されて、ワークテーブル30から回収され、ワーク洗浄装置56に搬送される。
(もっと読む)
ワーク粘着チャック装置及びワーク貼り合わせ機
【課題】板状ワークに対する可動膜の加圧分布を均等化して板状ワークの部分的な変形を防止する。
【解決手段】可動膜2に、支持部材3の通路3aと対向する肉厚な板状部2aと、通路3aを囲む表面部位3b1と対向する肉薄な変形可能部2bをそれぞれ形成し、通路3aからの流体で変形可能部2bを板状ワークWへ向けて変形させることにより、剛性の高い肉厚な板状部2aが形状保持されながら平行移動し、板状ワークWに対する可動膜2の押圧力が分散されて、板状ワークWの一部に集中して荷重がかかることなく、粘着部材1の粘着面1aから板状ワークWが剥離される。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体、基板処理装置及び基板処理システム
【課題】基板毎に外径寸法が変動した場合でも、基板の周辺部における塗布膜を除去する領域の幅寸法を一定にすることができる基板処理方法を提供する。
【解決手段】表面に塗布膜が形成された基板を回転させた状態で、基板の周辺部の表面にリンス液供給部80によりリンス液を供給することによって、リンス液を供給した位置の塗布膜を選択的に除去する基板処理方法において、基板を予め基板搬送部A3により搬送する際に、基板搬送部A3に設けられた検出部5により、基板の周辺部の位置を検出し、検出した位置に基づいて、周辺部の表面にリンス液を供給する時のリンス液供給部80の位置を決定する。
(もっと読む)
基板搬送方法、基板搬送装置、及び塗布現像装置
【課題】基板搬送装置のバキューム機構に用いられるパッドからの基板のずれを検出可能な基板搬送方法を提供する。
【解決手段】この基板搬送方法では、複数の載置部のうちの一の載置部の基板を保持部で受け取って保持し、保持部に保持される基板を一の載置部から搬出し、保持部に保持される基板の保持部に対する位置(第1の位置)を検出し、保持部に保持される基板を他の載置部に臨む場所まで搬送し、その場所において、保持部に保持される基板の保持部に対する位置(第2の位置)を検出し、第1の位置及び第2の位置に基づいて、搬送前後において生じた、基板の保持部に対する位置ずれ量を算出し、算出された位置ずれ量が所定の範囲に入るか否かを判定する。
(もっと読む)
基板保持装置、基板処理装置、基板処理方法、及び基板処理プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】基板の材質や表面の状態などの影響を受けることなく基板の保持状態の良否を正確に判断できるようにすること。
【解決手段】本発明では、基板(2)を保持するための基板保持手段(30)と、基板保持手段(30)で保持した基板(2)を押圧するための基板押圧手段(26)と、基板保持手段(30)で保持した基板(2)を検出するための基板検出手段(25)と、基板保持手段(30)、基板押圧手段(26)、及び基板検出手段(25)を制御するための制御手段(27)とを有し、制御手段(27)は、基板保持手段(30)で基板(2)を保持するとともに基板検出手段(25)で基板(2)を検出して初期値とし、その後、基板押圧手段(26)で基板(2)を押圧するとともに基板検出手段(25)で基板(2)を検出して比較値とし、初期値と比較値とを比較して基板保持手段(30)による基板(2)の保持状態の良否を判断することにした。
(もっと読む)
ウェーハ収納カセットおよび搬送方法
【課題】搬送ロボット等により吸着された反りのあるウェーハでも破損させることなく収納する。
【解決手段】ウェーハ収納カセット10であって、ウェーハWの周縁部W1を厚さ方向両側から押圧可能なウェーハ固定板11とウェーハ固定板をウェーハ厚さとなる方向に略平行状態に移動可能とする位置規制手段とからなり、ウェーハ固定板には収納するウェーハ口径に対応してウェーハ周縁部以外にウェーハ固定板が当接しないように開口部11cが設けられ、位置規制手段は、複数のウェーハ固定板に設けた貫通孔11a,11bを貫く位置規制棒15,16と、隣接するウェーハ固定板にそれぞれ両端が回動可能に接続されたリンク棒12,13とを有し、ウェーハの搬出入時にはウェーハの両側のウェーハ固定板の間隔を広げ、ウェーハの収納時にはウェーハ固定板でウェーハを押圧してウェーハの反り変形を矯正する。
(もっと読む)
141 - 160 / 2,963
[ Back to top ]