
Fターム[5F031FA15]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送の形態 (16,275) | 移送手段⇔移送手段での受渡し (1,450) | 中継部(載置台等)が介在するもの (1,005)
Fターム[5F031FA15]に分類される特許
141 - 160 / 1,005
搬送車のグリッパ装置、及び搬送車
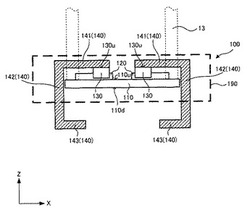
【課題】搬送車のグリッパ装置において、被搬送物の落下を防止するための修理やメンテナンスの必要を少なくする。
【解決手段】搬送車のグリッパ装置は、ベースプレート(110)と、このベースプレートの上面に設けられたガイドレール(120)と、このガイドレールに沿って互いに接近及び離間するように略水平方向に移動可能に係合された一対のガイドブロック(130)と、このガイドブロックの上面に固定され、ベースプレートの上面に沿って延在する水平部分(141)と、この水平部分からベースプレートより下方まで延在する垂直部分(142)と、この垂直部分の下端側に設けられ被搬送物を把持するための爪部(143)とを夫々有する一対の把持部(140)とを備える。
(もっと読む)
フレームクランプ装置

【課題】 環状フレームをクランプしない状態で被加工物の切削を開始したり、又は押さえ部材の上面に環状フレームが載置された状態で被加工物の切削を開始して、クランプ装置や切削ブレードを破損させてしまうことのないクランプ装置を提供することである。
【解決手段】 チャックテーブルの外周に配設されて、粘着シート上に貼着された被加工物を支持する環状フレームを固定するフレームクランプ装置であって、該環状フレームを支持する支持部材と、回転軸を有し、該支持部材に固定されたエアアクチュエータと、該エアアクチュエータの該回転軸に固定され、該エアアクチュエータを駆動することによりクランプ位置と解放位置との間で回動される押さえ部材と、該押さえ部材が該クランプ位置又は該解放位置に位置づけられたことを検出する検出手段と、を具備したことを特徴とする。
(もっと読む)
真空処理装置
【課題】設置面積あたりの生産性が高い半導体製造装置を提供する。
【解決手段】大気搬送室の背面側に並列に連結された第一と第二のロック室と、前記第一のロック室の後方側でこれと連結された第一の搬送室と、この第一の搬送室の後方側でこれと連結された第二の搬送室と、前記第二のロック室の後方側でこれと連結された第三の搬送室と、前記第一の搬送室と第二の搬送室及び第一の搬送室と第三の搬送室との間に配置されウエハがこれらの間で受け渡される第一及び第二の中継室と、前記第一,第二または第三の搬送室に連結された複数の処理室とを備え、前記第二の搬送室に連結された処理室の数が前記第一または第三の搬送室に連結された処理室の数よりも大きく、前記第二の中継室で前記第一または第二の搬送室に連結された処理室で処理された前記ウエハのみが前記第三の搬送室に受け渡される。
(もっと読む)
基板搬送ロボット
【課題】基板が損傷しない基板搬送ロボットを提供する。
【解決手段】第一、第二の従動アーム22a,22bによって回転され、互いに歯合した第一、第二の規制ギア25a,25bに対し、それぞれ歯合する第一、第二のピニオンギア32a,32bを設け、第一、第二のピニオンギア32a,32bでピニオンギア用ラック41を挟む。ハンド23が放射方向外側から内側に向けて移動し、ハンド23が搬送室内に位置する状態では、ピニオンギア用ラック41は放射方向外側に移動し、緩衝部材を介して基板15を押圧し、基板15をクランプする。ハンド23が放射方向外側に移動し、処理室内に位置するときは、ピニオンギア用ラック41は放射方向内側に移動し、クランプは解除される。搬送室内でクランプされているので高速移動が可能である。
(もっと読む)
基板処理装置及び基板処理方法
【課題】高スループット化と省フットプリント化の相反する条件の両立を実現することのできる基板処理装置及び基板処理方法を提供する。
【解決手段】反応炉52と、ボート48,49を搬送する少なくとも2つのボート搬送装置58,60と、反応炉52真下へ移動可能であって、ボート48,49を載置する少なくとも1つのボート置台46と、反応炉52により処理された処理済基板38を保持する1つのボート48を1つのボート搬送装置60により支持した状態で反応炉52から離れた位置に退避させている間に、未処理基板38を保持した他のボート49を支持する他のボート搬送装置58により他のボート49を搬送して、他のボート49を反応炉52にロードするように制御する制御手段と、を有する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】冷却室内で複数枚の基板を冷却する際に、温度の高い基板の輻射熱の影響を温度の低い基板が受けにくくなり、温度の低い基板の冷却速度の低下を抑える。
【解決手段】基板を複数段に収納するロードロック室と、ロードロック室の一方側からロードロック室内外に基板を搬送するエンドエフェクタを備えた第1搬送アームを有する第1搬送機構と、ロードロック室の他方側からロードロック室内外に基板を搬送するエンドエフェクタを備えた第2搬送アームを有する第2搬送機構と、を備え、ロードロック室内の基板支持部に支持される基板の間に基板と離間して基板間の熱を遮る隔壁を設け、基板支持部と隔壁の間であってエンドエフェクタ待機空間と異なる箇所に隔壁上方に収納される基板に接近し基板の輻射熱を吸収する隔壁付帯部を有する。
(もっと読む)
搬送体昇降装置
【課題】簡素な構成で大きな力が作用することなくかつ位置ずれしにくく基台を上部位置に位置決めできるようにする。
【解決手段】昇降装置30は、搬送台車4を昇降可能な装置である。昇降装置30は、搬送台車4を支持する昇降基台32と、昇降機構34と、上ストッパ36と、制御装置40と、を備えている。昇降機構34は、昇降チェーン62を用いて、上部位置と下部位置とに昇降基台32を昇降させる。上ストッパ36は、上昇する昇降基台32に上側から当接するように上部位置に対応して配置されている。制御装置40は、昇降部32に搬送台車4が支持された状態で昇降基台32が上位置決め部に接触する昇降位置を上部位置として昇降機構34を位置決め制御する。
(もっと読む)
載置台駆動装置
【課題】検査装置の省スペース化及び軽量化に資する載置台駆動装置を提供する。
【解決手段】本発明の載置台駆動装置20は、検査室10内の載置台11を水平方向に移動させる水平方向駆動機構21と、水平方向駆動機構21を支持する基台22と、検査室10内で圧縮空気を用いて載置台11を支持台12から浮上させる載置台浮上機構(例えば、エアベアリング)23と、水平方向駆動機構21と載置台11を連結する連結機構24と、水平方向駆動機構21及び基台22が収納された筐体25と、を備えている。
(もっと読む)
搬送装置の位置決め機構
【課題】メンテナンスの際に搬送装置を容易に移動することを可能とし、かつ、再設置時に位置の再現性が得られるようにし、搬送ロボットのティーチングが不要とし、露光装置及びコータ・デベロッパの稼動停止時間の短縮を実現する。
【解決手段】装置固定台210と、装置固定台210の下面に固定された位置決め用突起部8a、8b、8cと、位置決め用突起部8a、8b、8cに対応する位置決め用突起受け部7a、7b、7cと、装置固定台210を鉛直方向に移動させるための昇降機構と、装置固定台210を水平移動させるための水平移動機構と、昇降機構を操作するための操作部とを含む搬送装置用位置決め機構を用いる。
(もっと読む)
基板位置決め装置、基板処理装置、基板位置決め方法及びプログラムを記録した記憶媒体
【課題】回転軸に対し円形基板の中心の位置決めを正確に行うことのできる基板位置決め装置を提供する。
【解決手段】基板30の位置決めを行うための基板位置決め装置において、基板載置部44と、前記基板の側面に接触する第1の基準部11を有する第1の位置決め機構部10と、前記基板30の側面に接触する第2の基準部21を有する第2の位置決め機構部20と、前記第1の位置決め機構部10を駆動させる第1の駆動部13と、前記第1の駆動部13を制御する制御部50と、を有し、前記第2の基準部21は、前記基板30と接触部24において接触するものであって、前記接触部24に対し前記駆動部13の移動方向に力を加えることのできる弾性部と、前記位置決め機構部20の位置情報を検出するための検出部28とを有する。
(もっと読む)
基板処理装置のデータ取得方法及びセンサ用基板
【課題】基板処理装置の各処理モジュールのデータを効率よく取得すると共に精度高い検査を行うこと。
【解決手段】処理モジュールの情報を収集するためのセンサ部と、このセンサ部に電力を供給すると共に充電可能な蓄電部を含む第1の電源部とを備えたセンサ用基板を第1の保持部材に保持する工程と、次いで前記第1の保持部材を前進させてセンサ用基板を処理モジュールに受け渡す工程と、その後前記センサ用基板のセンサ部により処理モジュールに関するデータを取得する工程と、前記第1の保持部材が前記処理モジュールから充電された電力が消費された前記センサ用基板を受け取って後退し、前記基台と共に移動する第2の電源部により非接触でセンサ用基板の第1の電源部を充電する工程と、を含むように処理を行う。
(もっと読む)
ウエハ処理方法およびシステム
【課題】ウエハのような対象物を処理するのに使用するための方法及びシステム(120)を提供し、ウエハの研磨及び/又は研削を含む。
【解決手段】フロントエンドモジュール(124)は、保管装置(126)を連結し、処理のための対象物を保管する。フロントエンドモジュール(124)は、単一のロボット、搬送ステーション、及び複数のエンドエフェクタを備えることができる。処理モジュール(122)は、単一のロボットが対象物を保管装置から処理モジュール(122)へ供給するように、フロントエンドモジュール(124)と連結される。処理モジュール(122)は、回転テーブル、及び、供給された対象物を取り出しそして対象物を回転テーブル上で処理するキャリアをもつスピンドルを備える。
(もっと読む)
基板搬送処理装置及び基板搬送処理方法
【課題】独立した複数の装置間で、複数の基板を処理する場合においても、基板受け渡しに待ちを生じない基板搬送処理装置を提供する。
【解決手段】第1の基板処理装置の第1のセパレーションチャンバーと第2の基板処理装置の第2のセパレーションチャンバーとが、基板受け渡しチャンバーを介して気密に接続されており、基板受け渡しチャンバーは、設置床面に対して垂直方向に積み重ねられた第1の基板受け渡しステージと第2の基板受け渡しステージとを有する。
(もっと読む)
プラズマ処理装置,基板保持機構,基板位置ずれ検出方法
【課題】伝熱ガスのガス流路の圧力損失の影響をなくして基板の位置ずれ検出の精度を向上させる。
【解決手段】載置台300とその基板保持面に保持された被処理基板との間にガス供給源からのガスを供給するためのガス流路352と,載置台の基板保持面に形成され,ガス流路からのガスを基板保持面Ls上に案内する複数のガス孔354と,基板保持面におけるガス孔形成領域Rの外側に形成され,基板の裏面にかかる圧力を検出する複数の圧力検出孔370a〜370dと,これら圧力検出孔に接続された圧力センサ380a〜380dとを設け,これら圧力センサからの検出圧力に基づいて基板の位置ずれ検出を行うようにした。
(もっと読む)
カセットストッカ
【課題】スタッカクレーン走行時においても側方へ押し退けられる塵埃を含んだ空気流がポートエリア内に流れ込まないようにしてカセットを汚染することなく高速で搬送できるようにしたカセットストッカを提供すること。
【解決手段】スタッカクレーンエリアSaを走行するスタッカクレーンKの走行台車側部位置で、かつポートエリアSb下方位置にスタッカクレーンエリアSa下部と互いに導通するようにして、スタッカクレーンKの走行時に発生した塵埃をダウンフローと一緒に吸収するようにしたエアーチャンバCを、スタッカクレーンKの走行方向に沿って設置する。
(もっと読む)
基板搬送方法
【課題】板を搬送し膜厚測定器との間で基板の受渡しを行う搬送用ロボットの待機時間を削除または減少させるように搬送用ロボットの基板搬送動作を制御することで、装置全体としてのスループットを向上させる。
【解決手段】基板の膜厚を測定する膜厚測定器との間で基板の受渡しを行いながら搬送用ロボットで基板を搬送する基板搬送方法において、膜厚測定器は、内部に搬入された基板に対する膜厚測定が終了する所定時間前に事前終了予告信号を出力し、膜厚測定器から出力された事前終了予告信号を受けて基板搬送動作を開始するように搬送用ロボットを制御する。
(もっと読む)
基板貼合せ方法
【課題】半導体ウエハなどのワークと補強用の支持基板との貼り合せ精度の向上を図ることのできる基板貼り合わせ方法を提供する。
【解決手段】複数個の係止爪38で周縁部分を係止保持された支持基板W2をウエハW1の両面接着シート貼付け面に近接するように対向配備し、この支持基板W2の非貼合せ面の略中央から略半球形状の弾性体で構成された押圧部材39を押圧し、この押圧部材39を弾性変形させて支持基板面に扁平接触させながら支持基板W2をウエハW1に貼り合せる。
(もっと読む)
基板処理装置
【課題】基板処理速度を向上できる基板処理装置を提供する。
【解決手段】基板処理装置10は、垂直姿勢で水平方向に積層された複数枚の基板Wに対して一括して処理を施す基板処理部2と、基板受け渡し位置P1,P2と基板処理部2との間で複数枚の基板Wを一括搬送する主搬送機構3と、フープFに対して複数枚の基板Wを一括して搬出入するとともに、その複数枚の基板Wを水平姿勢と垂直姿勢との間で一括して姿勢変換させる搬出入機構4と、移載機構5と、第1および第2水平搬送機構6,7とを備えている。移載機構5は、移載位置P3において、搬出入機構4との間で基板Wを授受し、第1および第2水平搬送機構6,7との間で基板Wを授受する。第1および第2水平搬送機構は、それぞれ基板受け渡し位置P1,P2で、主搬送機構3との間で基板Wを授受し、移載位置と基板受け渡し位置P1,P2との間で基板Wを搬送する。
(もっと読む)
載置プレート、基板移載装置および基板処理装置
【課題】基板を基板収納容器から確実に取り出すことができる載置プレート、基板移載装置および基板処理装置を提供する。
【解決手段】ウエハ1をポッドに出し入れするツィーザ50において、ツィーザ50はウエハ1を載置する基端側載置部52、52および先端側載置部54、54と、ウエハ1を前記ポッドから取り出す際にウエハ1の前記ポッド内の奥側の周縁部を引っ掛ける先端側引っ掛け部55、55と、ウエハ1の位置ずれを防止する座ぐり51と、を具備し、先端側引っ掛け部55、55は先端側が二股に分かれて配置され、先端側載置部54、54の載置面との夾角Θbが直角または鋭角に設定され、ウエハ1を引っ掛ける際には、前記ポッド内の位置決め部の近傍に位置するように構成されている。
(もっと読む)
搬送システム
【課題】製造装置を変更した際に新たにケースの昇降を制御する制御部を用意する必要のない搬送システムを提供すること、および複数の製造装置を同時に設置した際に各製造装置にケースの昇降を制御する制御部を搭載する必要のない搬送システムを提供する。
【解決手段】オープナ20に、搬送機40との間で信号の送受信を行うことにより、ケース30の昇降を制御するオープナ制御盤21を備え、搬送機40に、オープナ制御盤21と信号の送受信を行うことにより、ケース30をオープナ20に載置させる。
(もっと読む)
141 - 160 / 1,005
[ Back to top ]