
Fターム[5F031FA15]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送の形態 (16,275) | 移送手段⇔移送手段での受渡し (1,450) | 中継部(載置台等)が介在するもの (1,005)
Fターム[5F031FA15]に分類される特許
61 - 80 / 1,005
マルチチャンバー型真空処理装置
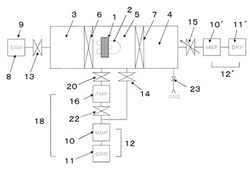
【課題】 真空排気系が簡素化された、しかもコストの安いマルチチャンバー型真空処理装置を提供する。
【課題を解決するための手段】 被処理物1を搬入・搬出するロードロック室3と前記ロードロック室3及び所定の処理をするプロセス室4と、該プロセス室4に隣接して、前記被処理物1を前記プロセス室4との間で搬送するセパレーション室5を備えたマルチチャンバー型真空処理装置であって、真空排気装置として、前記プロセス室4には粗排気装置だけを備え、前記セパレーション室5には高真空排気装置と粗排気装置を備えている。
(もっと読む)
基板処理装置

【課題】スループットを向上させることができる基板処理装置を提供する。
【解決手段】基板処理装置100は、インデクサブロック11、第1の処理ブロック12、第2の処理ブロック13およびインターフェイスブロック14を備える。インデクサブロック11は、一対のキャリア載置部111a,111bおよび搬送部112を含む。キャリア載置部111a,111bには、複数の基板Wを多段に収容するキャリア113がそれぞれ載置される。搬送部112には、搬送機構IR1,IR2が設けられる。搬送機構IR1,IR2は、互いに並行して基板Wを搬送する。
(もっと読む)
基板処理装置
【課題】基板をそれぞれ搭載する複数のサセプタに高周波電力を印加して、誘導加熱により当該複数のサセプタを加熱して基板を処理する基板処理装置であって、積層方向において均熱領域をより長く確保することが可能な基板処理装置を提供する。
【解決手段】複数のサセプタ150を積層して保持するサセプタ保持部材217と、複数のサセプタを収容する容器203と、容器の外側に配置された誘導コイル207と、容器203の外側に配置された保温材360と、を備え、容器203は上側の閉塞部270と、側壁部272とを有し、保温材360は、容器203の閉塞部270を覆うと共に、閉塞部270から側壁部272の一部までを覆って側壁部272と誘導コイル207との間を延在して設けられている。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
基板処理装置の制御方法
【課題】処理時間を短縮しスループットを向上するする。
【解決手段】複数の処理室C,Eが個別に仕切りバルブ3を介して連結された搬送室Tを介して処理室Cから処理室Eへ基板Sを移動させる搬送手段12を有する基板処理装置CTにおいて、搬送手段のロボットアーム12aを同一平面内の旋回動作及び伸縮動作させ、旋回方向に沿って配置された複数の処理室間で前記基板を搬送する際に、搬送手段の一連の動作および前記仕切りバルブの開閉動作を1つのコマンドで実行するとともに、複数の処理室における仕切りバルブが同時に開いた状態を有してなる。
(もっと読む)
ウエーハ及びウエーハの搬送方法
【課題】 搬送時に円形凹部の底面を異物で汚染することのないウエーハ及びウエーハの搬送方法を提供することである。
【解決手段】 円形凹部と該円形凹部を囲繞する環状凸部とを裏面に備えるウエーハであって、該円形凹部の直径が該環状凸部の上面から該円形凹部の底面に向かって大きくなる様に該環状凸部の内周壁が傾斜していることを特徴とする。搬送方法は、複数の支持指を円形凹部内に挿入し、支持指で環状凸部の内周壁上方を支持した状態でウエーハを搬送する。
(もっと読む)
ウエーハ及びウエーハの搬送方法
【課題】 搬送時に円形凹部の底面を異物で汚染することのないウエーハ及びウエーハの搬送方法を提供することである。
【解決手段】 円形凹部と該円形凹部を囲繞する所定の幅を有する環状凸部とが裏面に形成されたウエーハであって、該環状凸部の内周壁に局所的に複数のへこみ部を有することを特徴とする。搬送方法は、複数の支持指を環状凸部の内周壁に形成された凹み部に挿入し、支持指で環状凸部の内周壁を支持した状態でウエーハを搬送する。
(もっと読む)
浮上塗布装置及び浮上塗布方法
【課題】塗布膜に形成されるムラの発生を抑えるとともに、タクトタイムを短縮できる塗布装置および塗布方法を提供する。
【解決手段】基板10上に吐出装置3aから塗布液を吐出し、塗布後に塗布基板を乾燥装置5に浮上搬送機構6により搬送する塗布装置1であって、前記浮上搬送機構は振動浮上機構42を有し、搬送工程において基板上に塗布された塗布膜を前記振動浮上搬送機構により基板に生じる振動により引き起こされるレベリング効果より塗布膜に生じる塗布ムラを解消する。
(もっと読む)
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】基板を押圧する際の荷重を適切に制御し、基板同士の接合を適切に行う。
【解決手段】接合装置は、下面に上ウェハWUを吸着保持する上部チャック230と、上部チャック230の下方に設けられ、上面に下ウェハWLを載置して吸着保持する下部チャック231と、を有している。上部チャック230には、上ウェハWUの中心部を押圧する押動部材250が設けられている。押動部材250は、上ウェハWUの中心部と当接して当該上ウェハWUの中心部にかかる荷重を制御するアクチュエータ部251と、アクチュエータ部251を鉛直方向に移動させるシリンダ部252とを有している。アクチュエータ部251には、当該アクチュエータ部251に対して所定の圧力の空気を供給する電空レギュレータが設けられている。
(もっと読む)
ウエーハ加工装置
【課題】クリーンルーム内の単位面積当たりにおける生産数量を高めることができるウエーハ加工装置を提供する。
【解決手段】ウエーハ保持手段21とウエーハ10を加工する加工手段とを具備する加工機2a,2bと、カセット32に収容されたウエーハ10を搬出する搬出手段34および搬出されたウエーハの仮置き手段33とを具備するウエーハ搬出機3と、仮置き手段33に仮置きされたウエーハ10を加工機2a,2bのウエーハ保持手段21に搬送するウエーハ搬送機4とを含むウエーハ加工装置1であって、加工機2a,2bとウエーハ搬出手段34およびウエーハ搬送機4はそれぞれ独立して構成されており、少なくとも2台以上の加工機2a,2bとウエーハ搬出機3およびウエーハ搬送機4の台数を適宜選定して配置し、仮置き手段33に仮置きされたウエーハ10をウエーハ搬送機4によって2台以上の加工機2a,2bのウエーハ保持手段21に搬送する。
(もっと読む)
基板処理方法、基板処理装置
【課題】 製品基板の処理において、戻り処理が必要となる場合であっても、無駄なダミー基板処理を低減すること。
【解決手段】 基板処理方法は、複数の基板のそれぞれに対して、第1処理を実行し、第1処理が実行された基板に、第2処理を実行する実行工程と、複数の基板のそれぞれに対して、第1および第2処理が実行された基板を退避室に回収する回収工程と、複数の基板のうち、最後の基板に対して第1処理が完了した後に、第1処理室にダミー基板を搬入し、ダミー基板に第3処理を実行し、さらにダミー基板を第1処理室から搬出する調整工程と、調整工程でダミー基板が第1処理室から搬出された後、回収工程において回収された基板を、第1処理室に搬入し、第3処理を実行する第2実行工程と、を有する。
(もっと読む)
樹脂剥がし装置および研削加工装置
【課題】ワークの一面を被覆する硬化した樹脂を容易に剥離できる樹脂剥がし装置を提供する。
【解決手段】円盤状のワークWの表面に貼りついた硬化樹脂膜Rを前記ワークWから剥離する樹脂剥がし装置であって、前記硬化樹脂膜Rは前記ワークWのエッジ全周からはみ出した状態で前記ワークWの表面に貼りついており、前記ワークWの裏面を吸着保持する保持面10hが形成された保持部10aと、前記保持部10aに保持された前記ワークWに貼りついた前記硬化樹脂膜Rのうち前記ワークWのエッジからはみ出した箇所に前記ワークWの裏面から表面に向けて外力を与える外力付与部10bと、を有することを特徴とする。
(もっと読む)
樹脂塗布装置
【課題】ワーク厚みのバラつきや樹脂の量の増減にかかわらず、樹脂を適切に押し広げること。
【解決手段】本実施の形態に係る樹脂塗布装置1は、ステージ602の上面に供給された液状樹脂Lを押圧部604における押圧面634に保持したワークWで上から押圧し液状樹脂LをワークW下面に広げる樹脂塗布装置1であって、押圧部604には、移動部606によるワークWのステージ602への接近によってワークW下面に液状樹脂Lが押し広げられる際に押圧面634が受ける圧力を検出する圧力センサ633が備えられ、制御部は圧力センサ633が検出した圧力に基づいて移動部606の動作を制御する構成とした。
(もっと読む)
ワーク保持装置
【課題】位置センサを備えることなく押圧手段を所定位置にセットアップでき、装置全体にかかるコストを低減すること。
【解決手段】本実施の形態に係るワーク保持装置は、気体供給部637によって供給される気体を吸引口から噴出しながら保持部(保持板624)とステージ602との間の距離を変化させ、このときの圧力変化のマップを圧力センサ633によって検出し、圧力センサ633の検出する圧力の値と前記マップに基づいて保持部とステージ602との間の距離を算出する構成とした。
(もっと読む)
真空処理装置
【課題】設置面積を増大させることなく、処理能力を向上させることが可能な真空処理装置を提供する。
【解決手段】処理すべき基板Sに対し、真空雰囲気中で一貫して複数の処理を施す真空処理装置Mにおいて、相互に隔絶可能に連結された複数の処理室A乃至Eと、各処理室間に対して基板を搬入または搬出する搬送ロボット1と、少なくとも搬送ロボット1の作動を制御し得る制御ユニット7と、を備える。処理室A乃至Eのうち同一の処理を施す少なくとも2つの処理室C1、C2を、複数枚の基板を収容してこれら複数枚の基板に対して同時にストック処理を施すストック処理室とし、何れか一のストック処理室でストック処理を施す間、他のストック処理室に対しては基板の搬入又は搬出のみを行うように構成した。
(もっと読む)
真空処理装置
【課題】アライメント後のウェハにおいても、処理を行う真空処理室を変更した際、変更先の真空処理室まで効率良くウェハを搬送し、搬送時間を短縮することで、生産性を向上した真空処理装置を提供する。
【解決手段】ウェハ200の処理を第一の真空処理室103aで行う場合、カセットから取り出したウェハ200のアライメントを第一のアライナー112にて行うが、何らかの事情で第一の真空処理室103aでの処理ができなくなり第二の真空処理室103bでの処理が必要となった場合、ウェハ200を第一のアライナー112に戻すのではなく、真空搬送中間室111にて、ロータリーアクチュエータ121を作動させウェハ200を載置したステージ123を回転させ、第二の真空処理室103bに適合したノッチ位置へとアライメントする。
(もっと読む)
基板搬送装置及び真空処理装置
【課題】ステータ表面と永久磁石表面の間隔を縮小してリニアモータ効率を向上することができる基板搬送装置を提供する。
【解決手段】永久磁石42と駆動磁石41の間に配置され、永久磁石42が配置されている空間を真空雰囲気に、駆動磁石41が配置されている空間を大気圧雰囲気に隔てる真空隔壁45は、永久磁石42と対向する部分が大気圧雰囲気側に凸に湾曲した断面形状を有し、永久磁石42及び駆動磁石41はいずれも、真空隔壁45と所定の距離を保つように真空隔壁45と対向する部分が湾曲している。このため、真空隔壁45の最大たわみ量を小さくすることができ、永久磁石42と駆動磁石41の距離を縮めることができる。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
真空処理装置
【課題】信頼性が高い真空処理装置を提供する。
【解決手段】真空搬送室内をウエハが搬送される第一及び第二の真空搬送容器と、これらの真空搬送容器各々に連結され処理室と前記真空搬送室とが連通された第一及び第二の真空処理容器と、前記第一及び第二の真空搬送容器の間で連結して内部に前記ウエハを収納可能な中間室容器と、前記第一の真空搬送容器に連結され内部が連通されたロック室と、前記第一及び第二の真空搬送容器と前記第一,第二の真空処理容器、前記中間室容器及び前記ロック室の各々との間に配置されて気密に開閉する複数のバルブとを備え、前記第一の真空処理容器の処理室と前記第一の真空搬送容器の真空搬送室との間または第二の真空処理容器の処理室と前記第二の真空搬送容器の真空搬送室との間のバルブを開放する前に前記第一及び第二の真空搬送容器の間に配置された前記バルブのいずれかを閉塞する。
(もっと読む)
基板搬送中継装置
【課題】移動速度を上げなくても搬送時間を短縮することができる基板搬送中継装置を提供する。
【解決手段】基板搬送中継装置25は、移送ロボットと搬送ロボットとの間で基板6を受渡す際にそれを中継する装置である。基板搬送中継装置25は2つの支持体28,29を備え、各々の支持体28,29が2つの支持部38,39,43,44を有している。これら支持部38,39,43,44は、上昇することで前記搬送ロボットのハンドと基板を受渡しできるように構成されている。また、基板搬送中継装置25は、2つの支持体28,29を夫々昇降させる第1昇降機構32及び第2昇降機構34を備えている。第2昇降機構34は、第1昇降機構32が第1支持体28を上方に移動させる場合には第2支持手段29を下方に移動させ、第1昇降機構32が第1支持体28を下方に移動させる場合には第2支持体29を上方に移動させるように構成されている。
(もっと読む)
61 - 80 / 1,005
[ Back to top ]