
Fターム[5F031FA21]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送の形態 (16,275) | 水平←→垂直状態の回転、表裏の回転 (200)
Fターム[5F031FA21]の下位に属するFターム
容器ごと回転,反転させるもの (49)
Fターム[5F031FA21]に分類される特許
1 - 20 / 151
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
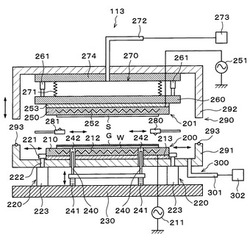
【課題】被処理基板と支持基板を適切に接合する。
【解決手段】接合装置の接合部113は、被処理ウェハWを保持する第1の保持部200と、第1の保持部200に対向配置され、支持ウェハSを保持する第2の保持部201と、第2の保持部201に保持された支持ウェハSを覆うように設けられた鉛直方向に伸縮自在の圧力容器271を備え、当該圧力容器271内に気体を流入出させることで第2の保持部201を第1の保持部200側に押圧する加圧機構270と、第1の保持部200、第2の保持部201及び圧力容器271を内部に収容し、内部を密閉可能な処理容器290と、処理容器290内の雰囲気を減圧する減圧機構300と、を有している。
(もっと読む)
基板搬送装置

【課題】搬送機構及び反転機構が各々独立したチャンバーに設けられているため、チャンバーの数が複数必要となり、設置面積が大きくなる。
【解決手段】、基板搬送装置1は、基板90を搬送方向へ移動させる搬送機構2と、基板90の上下を反転させる反転機構3と、を具備し、搬送機構2は、基板90を搬送方向へ摺動させる搬送アーム14を備え、反転機構3は、基板90を反転させる際に上方向から抑える上部チャック34と、基板90を反転させる際に下方向から支持する下部チャック35と、上部チャック34及び下部チャック35を上下方向に回動可能に軸支する回動軸32とを備え、搬送機構2及び反転機構3は一つの支持台5に固定支持される。搬送機構2及び反転機構3が同一チャンバー内に設けられることにより必要なチャンバーの数を少なくし、配置するための面積を小さくすることができる。
(もっと読む)
エネルギー線照射装置及びワーク搬送機構
【課題】エネルギー線照射システムにおいて、異なる寸法のワークに効率的にエネルギー線を照射できるコンパクトで低コストの搬送機構を実現する。
【解決手段】異なる寸法のワークW1、W2がそれぞれ搭載される第1、第2ワークホルダ31a、32aと、各々のワークホルダを各々のワーク授受領域とエネルギー線照射領域AR1との間で進退移動させる進退機構33と、互いに異なる位置に設けられた第1及び第2ワーク収容部21a、22aと、第1のワーク授受領域にある第1ワークホルダ31aと第1ワーク収容部21aとの間でワークW1を搬送する第1搬送アームと、第2のワーク授受領域にある第2ワークホルダ32aと第2ワーク収容部22aとの間でワークを搬送する第2搬送アームとを設けた。
(もっと読む)
基板処理装置
【課題】搬送途上において基板を反転することを容易に可能とする。
【解決手段】基板処理装置は、基板の上方を向く主面を処理する処理部と、基板が載置される載置部近傍の前部移載位置501と処理部近傍の後部移載位置502との間にて基板を搬送する基板搬送部5とを有する。基板搬送部5では、基板を保持する基板保持部51の両側部に一対の円筒部55が設けられ、搬送方向におよそ沿って伸びる一対の外側レール部53が基板保持部51の両側に設けられる。昇降機構571,572は、搬送方向における一対の外側レール部53の両端部に高低差を設けることにより、前部移載位置501から後部移載位置502へと一対の円筒部55を転がして、基板を反転しつつ基板保持部51を搬送する。これにより、搬送途上において基板を反転することが容易に可能となり、基板処理装置におけるスループットを向上することができる。
(もっと読む)
基板姿勢変更装置および基板処理装置
【課題】基板姿勢変更装置の製造コストを低減すること。
【解決手段】基板姿勢変更装置5は、基板Wを保持している状態で回転軸線L1まわりに回転可能であり、基板Wを保持している状態での重心GCの位置が回転軸線L1に対してずれている保持ユニット6と、回転軸線L1まわりの回転角が異なる複数の位置で保持ユニット6の回転を停止可能であり、前記複数の位置で保持ユニット6を保持可能な回転停止ユニット17と、回転軸線L1に交差する交差方向D1に保持ユニット6を移動させ、交差方向D1に保持ユニット6を加速または減速させる走行ユニット9とを含む。
(もっと読む)
剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】重合基板から剥離された被処理基板を適切に保持し、当該被処理基板の搬送又は処理を適切に行う。
【解決手段】剥離システムは、重合ウェハから剥離された被処理ウェハWを搬送又は処理する際に、当該被処理ウェハWを非接触状態で保持する保持部60を有している。保持部60の保持面61には、気体を噴出する複数の噴出口62と気体を吸引する複数の吸引口63とが形成されている。複数の噴出口62と複数の吸引口63は、保持部60に保持される被処理ウェハWに対応する位置全体に亘って形成されている。剥離システムにおいて、保持部60は、被処理ウェハWを搬送する搬送装置、被処理ウェハWの表裏面を反転する反転装置、重合ウェハを被処理ウェハWと支持ウェハに剥離する剥離装置、被処理ウェハWを洗浄する洗浄装置、被処理ウェハWを検査する検査装置に設けられている。
(もっと読む)
基板搬送方法および基板搬送機
【課題】基板搬送機自体の位置決め調整の許容範囲を広げ、基板へのダメージ、パーティクルの発生、基板の搬送不良を防止することができる基板搬送方法および基板搬送機を提供する。
【解決手段】本基板搬送方法は、基板Wの周縁部を一対の支持アーム171で支持し、支持アーム171と基板Wの周端部との間に所定のクリアランスが形成された状態で、支持アーム171および基板Wを移動機構162,165により移動させる。支持アーム171で支持している基板Wを反転させることも可能である。
(もっと読む)
基板の保持容器、基板の保持方法および保持容器を用いた太陽電池モジュールの製造方法
【課題】ペーストと保持容器との接触によるペーストのパターン不良が発生することなく、公差を含む基板を保持することが可能な保持容器を提供する。
【解決手段】基板20の保持容器10は、対向する少なくとも1組の側面102,103を有する基板の保持容器であって、1組の側面の間の距離が下方に向かって狭まるように傾斜しており、側面の内側が、基板の端辺202〜205と当接することによって、基板を保持する。保持容器を用いることにより、公差を含む基板の端までペースト30を載置するパターンを用いることが可能となった。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】加熱処理を伴う被処理基板と支持基板との剥離処理の際に、被処理基板の非接合面の酸化を抑制する。
【解決手段】剥離装置30は、加熱機構128を備え、且つ被処理ウェハWを保持する第1の保持部110と、加熱機構151を備え、且つ支持ウェハSを保持する第2の保持部111と、少なくとも第1の保持部110又は第2の保持部111を相対的に水平方向に移動させる移動機構170と、第1の保持部110の外周部に沿って環状に設けられ、且つ複数の孔が形成され、被処理ウェハWを保持した第1の保持部110の外周部に対して不活性ガスを水平に供給するポーラスリング130と、を有している。第1の保持部110において被処理ウェハWを保持するポーラス121の保持面121aの径は、被処理ウェハWの径よりも小さい。
(もっと読む)
搬送装置および組立装置
【課題】作業工程フローの変更や作業工程の増減、ワークの外形寸法の変更などの標準化されてない作業工程に対して、柔軟に対応でき、かつ、生産性(スループット)を向上できるとともに、設備の設置面積が大きくなるのを抑制できる搬送装置を実現する。
【解決手段】搬送装置1には、ワーク台6とスカラロボット3とロータリーインデックス4とを備えた搬送ユニット2a・2b・・2eが複数個備えられ、隣接する二つの搬送ユニット2a・2b中、搬送ユニット2aのワーク台6上のワークW1は、搬送ユニット2bのスカラロボット3によって、搬送ユニット2bのロータリーインデックス4上の第1の位置P1に移載され、ロータリーインデックス4上に移載されたワークW1は、第1の位置P1および/または第2の位置P2で所定工程が施され、上記所定工程が施されたワークW2を第1の位置P1から搬送ユニット2bに備えられたワーク台6上に移載する。
(もっと読む)
基板処理装置および基板処理方法
【課題】あるユニットに障害が発生したときでも、基板搬送を継続可能とする。
【解決手段】基板処理装置は、処理ユニット1〜3と、処理ユニット1〜3との間で基板を受け渡しすることができ、基板をそれぞれ保持するための複数のハンド11,12を有する搬送ロボット6と、処理ユニット1〜3に発生した障害を検知するセンサ類1S,2S,3Sと、センサ類1S,2S,3Sによって障害発生が検知されている処理ユニットに基板を渡さないように搬送ロボット6を制御する制御装置7とを含む。制御装置7は、一つの処理ユニットに搬入すべき基板を一つのハンドで保持しているときに当該処理ユニットに障害が発生した場合に、当該一つのハンドで当該基板を保持したまま当該処理ユニットへの基板の搬入を停止し、残りのハンドで他の処理ユニットとの間で基板を受け渡しするように搬送ロボット6を制御する。
(もっと読む)
基板搬送方法、その基板搬送方法を実行させるためのプログラムを記録した記録媒体及び基板搬送装置
【課題】2枚の基板がスペーサ部材を介して積層されてなる積層体を基板保持部との間で搬送するときに、搬送時間を短くすることができる基板搬送方法を提供する。
【解決手段】積層体を保持していないときにスペーサ部材を保持する基板保持部に対して、積層体を搬送する基板搬送方法であって、第1のフォーク53の上方に設けられた第2のフォーク54の一方の面54a側に設けられた第1の掴み機構61により、第1の基板を下掴みして受け取り、第2のフォーク54を上下反転させて第1のフォーク53に載置する第1の工程と、第2のフォーク54の一方の面54aと同一面側に設けられた第2の掴み機構62により、基板保持部に保持されているスペーサ部材を上掴みして受け取り、第1の基板上に載置する第2の工程と、第1の掴み機構61により第2の基板を上掴みして受け取り、スペーサ部材上に載置する第3の工程とを有する。
(もっと読む)
基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体
【課題】同一のフォークにより基板及びスペーサ部材のいずれをも支持可能であるとともに、収納容器に収容されている基板及びスペーサ部材の間隔を小さくすることができる基板搬送装置を提供する。
【解決手段】裏面同士が対向する2枚の基板がスペーサ部材を介して積層されてなる積層体を上下方向に複数保持する基板保持部に対して、積層体を搬送する基板搬送装置において、基板保持部との間で積層体を受け渡す第1のフォーク53と、第1のフォーク53の上方に、基板及びスペーサ部材を収容する収容部に進退可能かつ上下反転可能に設けられ、収容部と第1のフォーク53との間で基板又はスペーサ部材を受け渡す第2のフォーク54と、第2のフォーク54の一方の面54a側に設けられ、基板を上掴みする第1の掴み機構61と、第2のフォーク54の一方の面54aと同一面側に設けられ、スペーサ部材を上掴みする第2の掴み機構62とを有する。
(もっと読む)
接合方法、プログラム、コンピュータ記憶媒体、接合装置及び接合システム
【課題】基板同士の接合の良否を検査し、基板接合後の処理を円滑に行う。
【解決手段】上ウェハと下ウェハを接合する(工程S1〜S13)。その後、上部チャックにおいて上ウェハに対する真空引きを行い、吸引管の内部の圧力に基づいて、上ウェハと下ウェハの接着の良否を判定する(工程S14)。その後、上部チャックにおいて上ウェハに対する真空引きを行い、吸引管の内部の圧力に基づいて、上ウェハと下ウェハの接合強度の良否を判定する(工程S15)。その後、重合ウェハの外径を測定し、当該測定結果に基づいて、上ウェハと下ウェハの接合位置の良否を判定する(工程S16)。工程S16では、測定結果が所定の閾値未満である場合、接合位置が正常であると判定し、測定結果が所定の閾値以上である場合、接合位置が異常であると判定する。
(もっと読む)
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】基板を押圧する際の荷重を適切に制御し、基板同士の接合を適切に行う。
【解決手段】接合装置は、下面に上ウェハWUを吸着保持する上部チャック230と、上部チャック230の下方に設けられ、上面に下ウェハWLを載置して吸着保持する下部チャック231と、を有している。上部チャック230には、上ウェハWUの中心部を押圧する押動部材250が設けられている。押動部材250は、上ウェハWUの中心部と当接して当該上ウェハWUの中心部にかかる荷重を制御するアクチュエータ部251と、アクチュエータ部251を鉛直方向に移動させるシリンダ部252とを有している。アクチュエータ部251には、当該アクチュエータ部251に対して所定の圧力の空気を供給する電空レギュレータが設けられている。
(もっと読む)
基板反転装置、基板反転方法、剥離システム、プログラム及びコンピュータ記憶媒体
【課題】研磨処理により薄型化された基板を、反りや割れを生じることなく裏表反転させる。
【解決手段】基板反転装置42は、被処理ウェハWを保持する第1の保持部270と、第1の保持部270に対向して設けられた、被処理ウェハWを保持する第2の保持部271と、第1の保持部270と第2の保持部271を相対的に移動させて第1の保持部270と第2の保持部271を接近、離隔させる移動機構272と、被処理ウェハWを保持して搬送する搬送機構を有している。第1の保持部270、第2の保持部271及び搬送機構における被処理ウェハWの保持は、ベルヌーイチャックにより行われる。
(もっと読む)
ロータリー式ピックアップ機構及びそれを備えた半導体処理装置
【課題】ピックアップ部材がピックアップカメラの光路を遮るまでのピックアップ部材の回転角度を拡大して、ピックアップ部材の回転速度を速めても、ピックアップカメラによりデバイスの画像を確実に取り込むことができる、動作信頼性及び生産性に優れたロータリー式ピックアップ機構及びそれを備えた半導体処理装置を提供する。
【解決手段】ロータリー式ピックアップ機構6では、ピックアップ部材であるピックアップヘッド61が4本、駆動軸60に対し円周等配位置に、十字状に延びて取り付けられている。各ピックアップヘッド61は、少なくとも中心線が、駆動軸60を中心とした円(図2にて一点鎖線にて図示)の半径の延長線よりも回転方向と逆方向にずらして配置されている。
(もっと読む)
部品実装装置および部品実装方法
【課題】装置を小型にできるとともに、実装品質を向上でき、実装時間を短縮できる部品実装装置および部品実装方法を提供する。
【解決手段】部品実装装置10および部品実装方法は、電子部品1が保持される部品供給部と、部品供給部に対して上方から進退可能に設けられ、電子部品1におけるバンプが設けられた面に吸着することにより電子部品1がピックアップされるピックアップ工程を行うピックアップヘッド12と、ピックアップヘッド12と協働して電子部品1を挟持しながら電子部品1におけるバンプが設けられていない面に吸着してから、電子部品1に対するピックアップヘッド12の吸着が解除されることにより、電子部品1を受け渡される受渡工程を行うボンディングヘッド13と、を備え、ピックアップヘッド12が加熱され、かつ、ピックアップ工程および受渡工程のうちのいずれか一方において、各バンプの高さ寸法を揃えるレベリング工程を行う。
(もっと読む)
接合装置、接合方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板の接合を効率よく行い、接合処理のスループットを向上させる。
【解決手段】接合装置700は、被処理ウェハW、支持ウェハS、重合ウェハTを受け渡すための受渡部720と、被処理ウェハW又は支持ウェハSの表裏面を反転させる反転部721と、被処理ウェハWと支持ウェハSとを押圧して接合する接合部101と、被処理ウェハW、支持ウェハS、重合ウェハTを搬送する搬送部722とを有している。反転部721は、支持ウェハS又は被処理ウェハWを保持する保持部材と、前記保持部材に保持された支持ウェハS又は被処理ウェハWを水平軸周りに回動させると共に鉛直方向及び水平方向に移動させる移動機構と、前記保持部材に保持された支持ウェハS又は被処理ウェハWの水平方向の向きを調節する位置調節機構770と、を有している。
(もっと読む)
基板処理装置および基板搬送方法
【課題】搬送ロボットの待機時間を短縮できるとともに、装置の大型化が抑制または防止された基板処理装置および基板搬送方法を提供すること。
【解決手段】インデクサロボットIR1は、上下方向D1に配列された3個の基板保持部27のうち上側の2個の基板保持部27に基板Wを1枚ずつ搬入する。その後、3個の基板保持部27は、回転軸線L1まわりに180度回転する。これにより、基板Wが搬入された上側の2個の基板保持部27が下側に移動する。メイン搬送ロボットTR1は、下側に移動した2個の基板保持部27のうち上側の基板保持部27から基板Wを搬出する。その後、インデクサロボットIR1は、再び上側の2個の基板保持部27に基板Wを一枚ずつ搬入する。
(もっと読む)
1 - 20 / 151
[ Back to top ]