
Fターム[5F031JA30]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出の目的 (2,253) | 固着、保持位置のずれ (1,125) | 高さのずれ、傾き (160)
Fターム[5F031JA30]に分類される特許
21 - 40 / 160
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
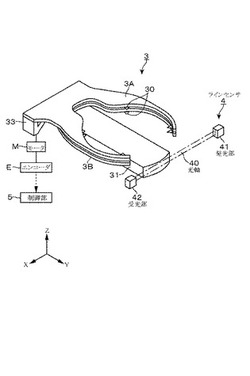
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
搬送手段の高さ移動量設定方法

【課題】支持テーブル上のワークを搬送する際の搬送手段の高さ移動量を自動的に設定すること。
【解決手段】ワークを支持する支持テーブルと、支持テーブル上のワークを吸引保持する吸引パッドを備える搬送手段とを備える研削装置1において、吸引パッドに発生した負圧の値を読み取りながら吸引パッドを降下させ(S1:降下工程)、負圧の値があらかじめ設定したしきい値を超えた際にその吸引パッドの高さ位置を記録し(S5:記録工程)、その吸引パッドの高さ位置に基づいて支持テーブルに支持されたワークを搬送手段が搬出する際の吸引パッドの高さ移動量を設定する(S6:設定工程)ことを特徴とする。
(もっと読む)
ダイボンディング装置とボンディング方法
【課題】簡単な構構成で、コレットの着地と、その先端に吸着保持されたダイの傾斜をも含めてより確実に検出可能とするダイボンディング装置とボンディング方法を提供する。
【解決手段】先端に半導体チップを吸着及び保持するコレットを含むボンディングヘッドと、前記ボンディングヘッドを保持して水平方向に移動する水平移動機構と、前記コレットを上下方向に移動する垂直移動機構と、前記ボンディングヘッドと前記コレットとの間の一部に、複数個の感圧素子を備えた着地及び傾斜検出部を設けたダイボンディング装置。
(もっと読む)
ダイ供給装置
【課題】ダイ供給装置において、突き上げピンの突き上げ高さを自動的に適正な突き上げ高さに調整できるようにする。
【解決手段】吸着ノズルでダイシングシート上のダイを吸着してピックアップする際に、ダイシングシートのうちの吸着しようとするダイの貼着部分をその真下から突き上げピンで突き上げて該ダイの貼着部分をダイシングシートから部分的に剥離させながら、吸着ノズルで該ダイを吸着してダイシングシートからピックアップするダイピックアップ動作を行うダイ供給装置において、突き上げピンの突き上げ高さを自動調整する際に、吸着ノズルでダイをピックアップできたと判定されるまで、ダイピックアップ動作毎に突き上げピンの突き上げ高さを所定量ずつ高くしてダイピックアップ動作を繰り返し実行し、吸着ノズルでダイをピックアップできたと判定された時点の突き上げピンの突き上げ高さを適正な突き上げ高さと判定する。
(もっと読む)
基板検知装置及び方法
【課題】基板に電圧を印加して基板にダメージを及ぼすことなく、当該基板における、大型基板において特に顕在化する複雑な態様の反りの発生部位及び発生状態を容易且つ正確に特定する。そして、大型基板でも確実なチャッキングに供することを可能とする。
【解決手段】センサ部2は、搭載面1aの中央部分に設けられた第1のセンサ群11と、第1のセンサ群11を囲む第2のセンサ群12と、第2のセンサ群12を囲む第3のセンサ群13とを有する。第1のセンサ群11は、基板面の中央部分に対応して設けられた1つの静電容量センサ10aから、第2のセンサ群12は、第1のセンサ群11を同心状に囲む複数の静電容量センサ10aから、第3のセンサ群13は、第2のセンサ群12を同心状に囲み、搭載面1aの周縁の近くに設けられた複数の静電容量センサ10aを有する。
(もっと読む)
露光装置及び露光方法
【課題】基板の反り量が大きい場合等であっても適切な露光を行うことができ、好ましくは基板内のチップ等の損傷を回避することもできる露光装置及び露光方法を提供する。
【解決手段】露光装置には、ステージ3上に載置された基板12に光を照射する光源1と、光源1側から基板12をステージ3に押圧する押圧部材2と、基板12の押圧部材2により押圧されている領域の平坦度を測定するセンサ4と、センサ4により測定された平坦度に応じて押圧部材2が基板12を押圧する力を制御する制御部5と、が設けられている。
(もっと読む)
基板保持具及び基板搬送システム
【課題】外寸が同じ基板保持具に観察試料として異なるサイズの基板が搭載される場合であっても、搭載される基板の違いにかかわらず、基板の未搭載や異常搭載を正確にセンサに検出させる。
【解決手段】ホールダ50上の、ウェーハ2Sが正常に置かれる規定領域部分P以外の規定外領域部分Qに、異常搭載されたウェーハ2Sが乗り上げる傾き検出用ピン51を立設配置し、異常搭載されたウェーハ2Sの姿勢状態を、ホールダ50へのウェーハ2の異常搭載を検出するウェーハ傾きセンサ47が検出可能な姿勢状態にする。
(もっと読む)
試料吸着保持装置および試料吸着判定方法
【課題】試料の適正吸着を判定する機構および制御の簡素化および簡便化を図る。
【解決手段】試料吸着保持装置100は、搬入・搬出に際して試料6を支持するリフトピン8と、試料吸着判定のために試料6を突上げる突上げピン10と、リフトピン8を上下に昇降させるリフトピン駆動装置5と、リフトピン8の昇降駆動力を突上げピン10へ伝達するリンク機構9と、を備えて構成される。そして、リンク機構9は、リフトピン8の頭頂部が試料ステージ4の上面に突出しない上面近傍の位置から試料ステージ4の下部の所定の位置まで下降させる動作に連動して、突上げピン10を、その頭頂部が試料ステージ4の内部に収納された位置から試料ステージ4の上面に載置された試料6を突上げる位置まで上昇させ、その後、その頭頂部が試料ステージ4の内部に収納された位置まで下降させるように構成されている。
(もっと読む)
被処理体の搬送方法、被処理体の搬送装置、及び、プログラム
【課題】異常が検知されていない被処理体を簡単、かつ、早く搬送することができる被処理体の搬送方法、被処理体の搬送装置、及び、プログラムを提供する。
【解決手段】ウエハボートに収納されている半導体ウエハに異常があると(ステップS2:Yes)、異常位置、及び、異常の種類を特定し(ステップS3)、スキップ位置を決定する(ステップS4)。次に、スキップ位置に収容された半導体ウエハの回収をスキップし、異常が検知されなかった半導体ウエハWの自動回収を実施する(ステップS5)。続いて、ウエハボート内に半導体ウエハが残存し(ステップS6:Yes)、自動回収可能な半導体ウエハがあると(ステップS7:Yes)、自動回収可能な半導体ウエハの自動回収を実施する(ステップS8)。そして、残存した半導体ウエハのマニュアル回収を実施する(ステップS10)。
(もっと読む)
移動体装置、露光装置、デバイス製造方法、及びフラットパネルディスプレイの製造方法
【課題】重量キャンセル装置の姿勢の安定化を図りつつ移動体の水平面に交差する方向に位置情報を求める。
【解決手段】 複数のレベリングセンサユニット70は、微動ステージ50に固定され、ターゲット用ステージ装置75に取り付けられたターゲット72,74を用いて、微動ステージ50の鉛直方向(Z軸方向)、及び水平面(XY平面)に平行な軸線周りの回転量情報を求める。従って、ターゲット72,74を重量キャンセル装置40に取り付ける場合に比べ、重量キャンセル装置40を軽量化できる。従って、重量キャンセル装置40が定盤12上を移動する際の動作が安定する。
(もっと読む)
基板貼り合わせ装置および基板貼り合わせ方法
【課題】基板の厚みには個体差があるので、接触位置を特定することが難しい。
【解決手段】第1基板を保持する第1ステージと、第1ステージに対向して配され、第2基板を保持する第2ステージと、第2ステージに保持された第2基板の表面を観察する第1顕微鏡と、第1ステージに保持された第1基板の表面を観察する第2顕微鏡と、第1ステージおよび第2ステージの少なくとも一方を他方に対して移動する移動機構と、第1顕微鏡の焦点面と第2基板の表面とを合致させた位置、および、第2顕微鏡の焦点面と第1基板の表面とを合致させた位置、に基づいて、第1ステージに保持された第1基板の表面と第2ステージに保持された第2基板の表面との間隔を算出する算出部とを備える基板貼り合わせ装置が提供される。
(もっと読む)
θZ駆動装置およびステージ装置
【課題】装置の高さが大きくなるのを抑制するとともに、装置全体の小型化を図ることが可能なθZ駆動装置を提供する。
【解決手段】このθZステージユニット110(θZ駆動装置)は、ベース部10と、ベース部10に対して上下方向であるZ方向およびZ方向を回転中心線とするθ方向に駆動されるステージ20と、ベース部10に対してステージ20を少なくともZ方向に駆動する第1モータ30と、少なくともステージ20の重量を補償する重量補償部40とを備え、第1モータ30および重量補償部40は、水平方向に間隔を隔てて配置されるとともに、上下方向の配置高さ範囲の少なくとも一部が互いに重なるように配置されている。
(もっと読む)
基板保持装置,基板保持方法、それらを用いた検査装置、及び検査方法
【課題】基板を汚染することなく非接触で保持する基板保持装置では、基板の自重によるたわみが発生したり、使用条件の中で回転動作の風圧による基板のたわみが発生するために、各種処理の障害になっている。
【解決手段】基板の上面を所望の面高さに保持したり、あるいは平面度を保持したりするために、基板上面に基板面の高さを測る非接触の変位センサを設置し、また、載せ台上面には複数の溝と障壁を設け、基板と乗せ台の間にエアーを供給してその圧力によって基板の変位を可能として、さらに、変位センサの出力をフィードバックすることで基板を任意の凸,凹形状に変形したり、平面化することを可能とする構造を持つ基板搭載装置。
(もっと読む)
基板搬送装置およびそれを用いた基板検査システム
【課題】本発明は、反りがある基板でも基板の上面に接触せずに搬送でき、基板の高さより上に搬送用の可動部がない基板搬送装置および基板検査システムを提供する。
【解決手段】
基板検査システム100は、基板搬送装置1と、搬送される基板Wの表面を撮像する撮像装置2と、撮像された画像を検査する検査装置3と、検査結果を表示する表示装置4を有する。基板搬送装置1は、基板Wに対して下方からエアを吹き付けて浮上させる浮上ステージ8と、浮上ステージ8に沿って移動可能で基板Wの裏面側の側縁部を吸着する吸着部9を備えた移動機構10を有する。移動機構10の移動台10dは、吸着部9の近傍に、補助吸着部11を有する昇降機構12を備える。反った基板Wに対し補助吸着部11が上昇して側縁を吸着して引き下げて吸着部9が基板Wを吸着し、移動台10dが移動して基板Wを搬送しつつ撮像装置2で撮像して検査する。
(もっと読む)
基板処理装置、積層半導体装置製造方法及び積層半導体装置
【課題】ロボット搬送アームの撓みを計測し、事故を未然に防止する。
【解決手段】基板を処理する複数の処理室に連結された連結室と、連結室に配され、基板を複数の処理室の間で搬送する搬送アームと、搬送アームを目標位置に移動した場合の搬送アームの実際の位置を計測する計測部と、目標位置と計測部により計測された位置との差を算出する算出部とを備える基板処理装置が提供される。複数の処理室の少なくとも一つは、減圧環境で複数の基板を押圧して貼り合わせる加圧室であり、複数の処理室の少なくとも他の一つは、搬送アームに受け渡す基板を仮置きするロードロック室である請求項1に記載の基板処理装置。
(もっと読む)
近接露光装置及び近接露光方法
【課題】比較的簡単な計算で、マスクとワークのギャップを平均化することができ、露光精度を向上することができる近接露光装置及び近接露光方法を提供する。
【解決手段】ギャップセンサ17によってマスクM及びワークWとの間のギャップを4箇所の測定点A、B、C、Dで測定し、4箇所の測定点A、B、C、Dによって画成される四角形ABCDの各辺の中点K,L,M,Nの4箇所の座標のうち、3箇所の中点K、L、Mの座標における各ギャップが一様になるようにZ−チルト調整機構43を駆動する。
(もっと読む)
露光装置及び露光方法
【課題】アライメント動作に要する時間を短縮して、スループットを向上することができる露光装置及び露光方法を提供する。
【解決手段】制御部70Aには、両アライメントマークMa,Waのずれ量がマスク位置調整機構16の駆動によって露光転写時の所望のアライメント精度範囲以内となる、アライメント動作実施許容範囲が設定されており、両アライメントマークMa,Waのずれ量がアライメント動作実施許容範囲以内であるとき、マスク位置調整機構16によるアライメント動作を実行して該アライメント動作を完了する。
(もっと読む)
基板保持装置、及びそれを用いたリソグラフィー装置、並びにデバイスの製造方法
【課題】被処理基板、若しくはチャック上に異常が発生した場合、大掛かりな装置を使用することなく、効率良く異常の要因及び場所を特定する。
【解決手段】基板Wを保持する基板保持装置10であって、基板Wを吸着して保持する保持ユニットと、基板Wが保持ユニットに搭載された状態で、保持ユニットの吸着力に関する物理量を計測する計測部15と、第1の条件と計測部15の計測結果とに基づく第1の判定と、第1の条件とは異なる第2の条件と計測部15の計測結果とに基づく第2の判定とを行い、第1及び第2の判定の結果に基づいて、予め設定された少なくとも3つの動作のうち1つを選択し、選択された動作に応じた処理を実行する制御部12とを備える。
(もっと読む)
処理装置及びその動作方法
【課題】回転浮上体の径方向の力と回転トルクとを同一の電磁石で制御することにより不要な外乱の発生を抑制することができる処理装置を提供する。
【解決手段】被処理体に対して処理を施す処理装置において、処理容器と、被処理体を支持する非磁性材料よりなる回転浮上体と、回転浮上体に所定の間隔で設けられた磁性材料よりなる複数の回転XY用吸着体と、回転浮上体に周方向に沿って設けられた磁性材料よりなる浮上用吸着体と、処理容器の外側に設けられて浮上用吸着体に垂直方向上方に向かう磁気吸引力を作用させて回転浮上体の傾きを調整する浮上用電磁石群と、処理容器の外側に設けられて回転XY用吸着体に磁気吸引力を作用させて浮上された回転浮上体を水平方向で位置調整しつつ回転させる回転XY用電磁石群と、ガスを供給するガス供給手段と、被処理体に処理を施す処理機構と、装置全体の動作を制御する装置制御部とを備える。
(もっと読む)
ウエハ移送装置及び移送方法
【課題】 アームをキャリア内に侵入させたとき、ウエハの姿勢に不正なゆがみがあると、アームがウエハに接触してしまう場合がある。
【解決手段】 アームが、ウエハを保持する。アーム駆動機構が、アームを退避位置から、ウエハを受け取る受取位置まで、または受取位置から退避位置まで移動させる。ガス吸引装置がガスを吸引する。第1のガス流路が、ガス吸引装置から、アームの内部を経由して、アームの表面に開口する。第1の検出器が、第1のガス流路内のガスの圧力または流速を測定する。
(もっと読む)
21 - 40 / 160
[ Back to top ]