
Fターム[5F031JA51]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出した信号の処理 (521)
Fターム[5F031JA51]に分類される特許
21 - 40 / 521
基板温度制御方法及びプラズマ処理装置
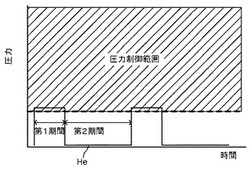
【課題】伝熱ガスの低い圧力領域における基板の温度制御を精度良く行うことができ、温度制御範囲を拡張してプロセスマージンの拡大を図ることのできる基板温度制御方法及びプラズマ処理装置を提供する。
【解決手段】冷却又は加温される載置台の基板載置面に基板を載置し、基板の裏面と載置台の基板載置面との間に伝熱ガスを供給し、かつ、伝熱ガスの圧力を検出し、検出された圧力検出値と圧力設定値とを比較して、圧力検出値が圧力設定値となるように伝熱ガスの供給を制御する基板温度制御方法であって、伝熱ガスの圧力を予め定めた下限圧力値以下の低圧力値とし、基板と載置台との熱交換を抑制して基板の温度制御を行う際に、圧力設定値を、低圧力値より高くかつ下限圧力値以上の第1圧力設定値とする第1期間と、低圧力値より低い第2圧力設定値とする第2期間とを交互に繰り返す。
(もっと読む)
基板処理装置及び基板処理方法

【課題】大気開放の時間を短縮し、スループットを向上させた基板処理装置を提供する。
【解決手段】本発明の基板処理装置1は、チャンバ11と、前記チャンバ内に配され、基板2が載置されるステージ12と、ガス供給ライン13aを通じて、前記チャンバ内に所定のガスを導入するガス供給手段13と、前記チャンバ内の圧力P1 を検出する圧力センサ15と、前記ガスの導入圧力P2 を制御する制御手段16と、を備え、前記ガス供給手段が、前記チャンバ内に所定のガスを導入圧力P2 で導入して前記チャンバを真空状態から大気開放する際に、前記圧力センサは、チャンバ内の圧力P1 を検出し、前記制御手段は、前記P1 に対して、前記P2 と前記P1 との差が略一定となるように、前記P2 を制御すること、を特徴とする。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】被処理基板を平流し搬送する基板搬送装置において、前記基板に対し所定の処理が施される直前に、該基板の位置ずれの有無を検出し、基板位置ずれに起因する不具合の発生を防止する。
【解決手段】基板Gを保持する基板保持手段7と、前記基板保持手段を基板搬送路2に沿って移動させる搬送手段6と、前記基板保持手段に保持された前記基板の幅方向の両側において、それぞれ前記基板の前端または後端を検出し、基板搬送方向における所定の基準位置に対するずれ量をそれぞれ検出するずれ量検出手段16A,16B,32,33,34,35,36,37と、前記ずれ量検出手段により検出された前記基板の幅方向両側における2つのずれ量に基づき、前記搬送手段を制御する制御手段10とを備える。
(もっと読む)
動的に駆動されるステージミラー及びチャック組立体を備えるZステージ
【課題】基材支持の装置及び方法を開示する。
【解決手段】ステージミラーに対する基材チャックの変位を感知し、ステージミラーへ結合されているZステージアクチュエータ及びXYステージアクチュエータのうちの一方又は両方を有する1つ以上のフィードバックループにおける変位に比例する信号を結合することによって、ステージミラーに対する基材チャックの運動が動的に補償される。これに代えて、基材支持装置は、Zステージプレート、ステージミラー、Zステージプレートへ取り付けられている1つ以上のアクチュエータ、及びステージミラーへ取り付けられている基材チャックを含み得る。基材チャックは基材チャックの6つの運動自由度に対する拘束を有する。アクチュエータはZステージプレートがZ方向に垂直な平面において走査されるとき、ZステージをZ方向へ運動させる。
(もっと読む)
プラズマ処理装置およびプラズマ処理方法
【課題】ステージ温度変化など運用条件の変更に対応し、突入電流の発生や過剰なESC電流が流れることを防ぎ、なおかつ伝熱用ガスを導入する時点で裏面圧力以上の静電吸着力を発生させる。
【解決手段】被処理基板をプラズマ処理するための処理室と、該処理室内にプラズマを発生させるプラズマ発生手段と、処理室内に設けられ被処理基板を保持する静電吸着膜を備えたステージを具備したプラズマ処理装置において、静電吸着膜と被処理基板間に流れるESC電流の電流値を検知し、ESC電流の値で吸着条件を設定し、ESC電流が設定した制御範囲内に収まるようにESC電流を検知しながら吸着電圧を段階的にステージに印加し、ESC電流が制御範囲内に収まったことを検知した後に伝熱用ガスを導入する。
(もっと読む)
シート剥離装置及び剥離方法
【課題】接着シートの剥離により被着体が損傷することを回避でき、剥離に要する時間の短縮化を図ることができるようにすること。
【解決手段】シート剥離装置10は、接着シートSが貼付された半導体ウエハWを支持する支持手段11と、剥離用テープPTを繰り出す繰出手段12と、接着シートSに剥離用テープPTを貼付する貼付手段13と、半導体ウエハWと剥離用テープPTとを相対移動させて半導体ウエハWから接着シートSを剥離可能な移動手段14と、移動手段14等を制御する制御手段16とを備えて構成されている。移動手段14は、接着シートSの剥離中に半導体ウエハWと剥離用テープPTとの相対移動速度を調整可能に設けられ、半導体ウエハWの端縁側から所定長さ接着シートSを剥離する工程に比べ、当該工程の後に接着シートSを剥離する工程の方が、前記相対移動速度を高速又は低速に設定できる。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】オブジェクトテーブルとハンドラとの間の振動の影響を最小化することが望まれている。
【解決手段】本発明はリソグラフィ装置に関する。このリソグラフィ装置は、オブジェクトWを受けるためのオブジェクトテーブルWTと、オブジェクトテーブルを動かすためのアクチュエータと、オブジェクトWをオブジェクトテーブルWTへ移送するまたはオブジェクトWをオブジェクトテーブルWTから移送するためのハンドラHWと、を備える。装置はアクチュエータおよび/またはハンドラと接続されたコントローラを備える。コントローラは、オブジェクトテーブルおよびハンドラが、オブジェクトテーブルへのまたはオブジェクトテーブルからのオブジェクトの移送方向における移送の間、その移送方向に直交する方向において互いに実質的に追従することが提供されるよう、アクチュエータおよびハンドラを駆動するようプログラムされおよび/または構成される。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、軌道に配置されたマークを確実に検出する。
【解決手段】有軌道台車システムは、天井又は天井近傍に敷設された軌道100と、軌道に沿って走行する台車とを備える。台車は、軌道の走行面部上を走行する走行部210と、走行部から軌道の間隙を利用して懸垂される台車本体部220と、走行部及び台車本体部のうち一方に設けられる検出手段610と、走行部及び台車本体部のうち他方に設けられ、検出手段から照射された光を検出手段へと反射させる反射手段620とを有している。軌道は、所定位置における走行面部から、検出手段及び反射手段間の光路を遮るように間隙側に突出するマーク部630を有している。
(もっと読む)
リソグラフィ装置、ステージ装置及びデバイス製造方法
【課題】基板テーブルを保持するように構築されたチャックを含むリソグラフィ装置、オブジェクトを配置するステージ装置、及びデバイス製造方法を提供する。
【解決手段】リソグラフィ装置は、放射ビームを調整するように構成された照明システムILと、放射ビームの断面にパターンを与えて、パターン付き放射ビームを生成することができるパターニングデバイスMAを支持するように構築された支持体MTと、基板Wを保持するように構築された基板テーブルWTと、パターン付き放射ビームを基板のターゲット部分に投影するように構成された投影システムPSと、基板Wを保持するように構築されたチャックと、使用時にチャックを変位する位置決めデバイスと、位置決めデバイスを制御するように構成された制御ユニットとを備え、制御ユニットはチャックの変形を可能にする実質的に動的な力によってチャックを励起するように構成される。
(もっと読む)
真空処理装置の運転方法
【課題】作業効率が良く精度の高いティーチングを行って処理の効率を向上できる真空処理装置の調整方法を提供する。
【解決手段】その上面に所定の波長の光の反射の特性を局所的に異ならせた特定の箇所を有した調整用の試料を前記試料台の上面の特定の位置と前記特定の箇所とを合わせて載置した後、前記真空容器の内部を封止した状態で前記ロボットを移動させて前記ロボットのアーム上の所定の位置に配置され前記反射した所定の波長の光の通過部を前記調整用の試料の前記特定の箇所の上方に移動させ、その移動の際に前記調整用の試料から向かって前記通過部を通過した光を前記板部材の外側で検知し、検出した前記光の量に応じて前記試料の特定の箇所と前記ロボットの所定の位置との位置合わせを行う。
(もっと読む)
リソグラフィ装置、リソグラフィ装置をキャリブレーションする方法、およびデバイス製造方法
【課題】ミラー表面の外乱を補償する。
【解決手段】リソグラフィ装置は、基板テーブルWT内で横ミラー66、68を使用して、基板テーブルWTの位置測定に対する基板テーブルWTの熱歪みの影響を補償するシステムを備えている。様々な基板テーブルスキャン軌跡、および基板テーブルWT内の横ミラー66、68の局所位置および回転の測定を使用してリソグラフィ装置をキャリブレーションする方法が、提示されている。基板テーブルWTが測定ステーションにある場合に、横ミラー66、68の幾何形状を測定するように露光ステーションでのみ使用される横ミラー66、68の幾何形状を規定するアライメントマークを備えたデュアルステージリソグラフィ装置。
(もっと読む)
基板加工方法
【課題】 基板の変形によってアライメントマークが検出できない場合に、アライメントマークを探索して加工動作を続行できるようにした基板加工方法を提供する。
【解決手段】 アライメントマークを撮像するために設定した撮像基準位置においてカメラにより撮像されたアライメントマーク画像から基板の位置情報を取得する際に、撮像基準位置での撮像ではアライメントマーク画像が検出されないときに、カメラ若しくはテーブルを移動することで、撮像位置を撮像基準位置の周辺に順次移動させるようにしてアライメントマーク画像を探索し、アライメントマーク画像が検出されたときの撮像位置と撮像基準位置との位置ずれ量を算出して加工用ツールによる加工位置を補正する。
(もっと読む)
ハンドラのティーチング方法及びハンドラ
【課題】吸着パッドが半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができるハンドラのティーチング方法及びハンドラを提供する。
【解決手段】吸着パッドを検査用ソケットに配置されたICチップに向かって下動させるとき、吸着パッドからエアーを噴射させながら下動させる。そして、検査用ソケットにICチップの上面に接触するとき、吸着パッドから噴射しているエアーが、ICチップにて塞がれるようにした。従って、エアーの噴射が塞がれることにより、吸引管内のエアーの圧力の上昇を圧力検出センサが検出することによって、吸着パッドが検査用ソケット内のICチップに接触する高さを求めることができる。
(もっと読む)
リソグラフィ装置および方法
【課題】振動が基板に投影されるパターンに及ぼす影響を低下させる。
【解決手段】リソグラフィ装置は、放射ビームを生成する放射源と、パターニングデバイスを支持する支持構造と、基板を支持する基板テーブルと、パターン付与された放射ビームを基板の目標部分に投影する投影系とを備える。リソグラフィ装置はさらに、目標部分の露光の間にパターニングデバイスと基板との間の相対的振動を測定するよう構成された振動測定装置を備える。制御装置は、測定された相対的振動が基板上に投影されるパターンに及ぼす影響を補償するよう前記放射ビームのパワーを調整する。
(もっと読む)
デュアルステージエリアリソグラフィ装置における位置測定システムの補正方法
【課題】ステージのステージ位置測定精度を改良する。
【解決手段】可動ステージの位置を測定する位置測定システムは、基準プレートと、基準プレートに対する可動ステージの位置に応じて、複数のセンサの少なくともサブセットが基準プレートと協働して、基準プレートに対する個々のセンサの位置を表す個々のセンサ信号をサブセットの各センサに提供するように構成された複数のセンサと、センサ信号からステージ位置を割り出すプロセッサと、を含み、該プロセッシングデバイスは、基準プレートと動作協働しているセンサの少なくともサブセットによって、過剰に規定された数のセンサ信号が提供される位置にステージがある場合、(a)過剰に規定された数のセンサ信号のサブセットからステージの位置を割り出し、(b)割り出されたステージの位置と残りのセンサ信号との矛盾から1つ又は複数のセンサのセンサ信号を補正する。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
基板ホルダ、貼り合せシステム、積層半導体装置の製造方法及び積層半導体装置
【課題】基板ホルダの劣化等による貼り合せシステムのトラブルを防止する。
【解決手段】基板を保持した状態で搬送される基板ホルダであって、基板を保持面に保持する本体部と、本体部に設けられ、外部から測定可能な指標と、指標の情報、および、外部からの測定により得られるべき結果の情報を、外部から読み出し可能に記憶する情報記憶部とを備える基板ホルダが提供される。指標は、測定によって互いに異なる複数の結果のいずれか一つが測定されるべく設けられており、情報記憶部は、複数の結果のうちの一つを、基板ホルダを識別する識別情報に対応付けて記憶している。
(もっと読む)
パターニングデバイスの操作方法及びリソグラフィ装置
【課題】装置のスループット及びコストへの影響とバランスをとったレチクルなどの局所的歪みの測定法を提供する。
【解決手段】歪みはレチクルの周辺部の複数の基準マーク(236)を用いて、周辺マークの相対位置の経時的な偏差を測定することで計算される。周辺マークのペアの測定位置を測定されたマークのペアを接続する線(s,s1,s2)に沿って配置されたセルの膨張に関連付ける式であって各セルの膨張を計算する式の体系を解くことができる。当該位置(320)の局所的位置偏差は少なくとも1つの測定された周辺マークと当該位置との間のサブエリアについての膨張計算値を組み合わせることで計算できる。例えばオーバレイエラーを低減するために、計算結果に従って補正を適用できる。パターニングデバイスにエネルギーを印加して(例えば、熱の投入又は機械的なアクチュエータによって)局所的位置偏差の分布を修正して補正を改善することができる。
(もっと読む)
コントローラ、リソグラフィ装置、オブジェクト位置の制御方法及びデバイス製造方法
【課題】改良型の制御システムを提供する。
【解決手段】オブジェクト上に作用するように配置された複数のアクチュエータを有するアクチュエータシステムを制御するコントローラが提供される。該コントローラは、ゲインバランシングマトリクスを用いてオブジェクトの重心に提供されることが望まれる一組の力を表す第1の制御信号を前記複数のアクチュエータによって提供される同等の力の組を表す第2の制御信号に変換する。システムは、第1の周波数帯域で第1のゲインバランシングマトリクスが使用され、第2の周波数帯域で第2のゲインバランシングマトリクスが使用されるようにさらに構成される。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
21 - 40 / 521
[ Back to top ]