
Fターム[5F031JA51]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出した信号の処理 (521)
Fターム[5F031JA51]に分類される特許
41 - 60 / 521
位置計測方法、位置制御方法、計測方法、ロード方法、露光方法及び露光装置、並びにデバイス製造方法
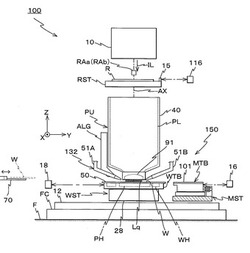
【課題】位置計測用のマークが存在しない移動体の位置を管理することを可能にする。
【解決手段】 所定形状のプレート50が着脱可能に搭載された移動体WSTの位置をその移動座標系を規定する計測装置18等で計測しつつ、プレート50の一部をアライメント系ALGで検出するとともにその検出結果と対応する前記計測装置の計測結果とに基づいてプレート50の外周エッジの位置情報を取得する。このため、その移動体WST上に位置計測用のマーク(基準マーク)などが存在しなくても、プレートの外周エッジの位置情報に基づいて、プレートの位置、すなわち移動体の位置を前記計測装置で規定される移動座標系上で管理することが可能になる。
(もっと読む)
リソグラフィ装置および投影アセンブリ

【課題】 能動型制振の安定的な作動範囲を拡大することである。
【解決手段】 リソグラフィ装置が、放射ビームを調整するように配置構成される照明システムと、パターニングデバイスを支持するように構築される支持体とを備える。さらに、リソグラフィ装置は、基板を保持するように構築される基板テーブルと、基板のターゲット部分上にパターン付けされたビームを投影するように配置構成される投影システムとを備える。能動型制振システムが、投影システムの少なくとも一部の振動を減衰するために提供される。能動型制振システムは、投影システムの位置量を測定するセンサおよび、センサにより生成される信号に依拠して投影システムに力を加えるアクチュエータの組合せを備える。能動型制振システムは、制振構造体に連結され、制振構造体は、投影システムに連結される。
(もっと読む)
パターニングデバイスから基板上にパターンを転写するためのリソグラフィ装置、および制振方法
【課題】改善された結像性能を有する装置を提供する。
【解決手段】本発明は、振動絶縁システムを介してベースによって支持されたサポートフレームと、パターンをパターニングデバイスから基板上に転写するように構成された投影システムであって、サポートフレームによってばね支持された第1のフレームを含む投影システムと、第1のフレームの運動を減衰するように構成された能動制振システムであって、第1のフレームの絶対的な運動を表す第1のセンサ出力を供給するように構成された第1のセンサシステム、第1のフレームとサポートフレームの間に力を加えるように配置された第1のアクチュエータシステム、および第1のセンサ出力に基づいて第1のアクチュエータシステムに駆動信号を供給するように構成されたコントロールシステムを含む能動制振システムとを含むリソグラフィ装置に関する。
(もっと読む)
異常原因分析方法及び異常分析プログラム
【課題】プラズマ処理されたウエハの異常原因を分析する。
【解決手段】クラスタ型のプラズマ処理システム10に配置された2以上のプロセスモジュールの少なくともいずれかにおいてプラズマ処理されたウエハWの異常原因分析方法であって、ウエハWがフープ115a〜115cから搬出され、前記2以上のプロセスモジュールの少なくともいずれかに搬送された後、前記フープ115a〜115cに戻るまでの搬送経路の情報を前記ウエハW毎に該ウエハの識別情報に関連付けて記憶する記憶工程と、処理済のウエハWの状態を検査する検査工程と、前記検査工程の結果、異常と判定されたウエハWの前記記憶された搬送経路の情報と、正常と判定されたウエハWの前記記憶された搬送経路の情報とを比較し、比較の結果に基づき異常原因の分析を行う異常分析工程と、を含む異常原因分析方法を提供する。
(もっと読む)
計測方法、ロード方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】物体を載置するための開口が形成されたプレート開口の位置や形状などを算出することを可能にする。
【解決手段】計測方法は、移動体WST上に着脱可能に搭載され、物体を載置するための開口50aが形成されたプレート50の一部を検出し、その検出結果に基づいて開口50aの内周エッジの位置情報を取得する内周エッジ位置取得工程を含む。これによれば、プレートの一部を検出し、その検出結果に基づいて開口の内周エッジの位置情報を取得することにより、該位置情報に基づいて、開口の位置や形状などを算出することが可能になる。
(もっと読む)
基板処理装置
【課題】動作回数を重ねても、機構部の軸動作のズレが累積することを抑制できる基板処理技術を提供する。
【解決手段】基板処理レシピ記憶部と、当該基板処理装置を構成する機構部の原点出しを行うイニシャルレシピ記憶部と、イニシャル処理を行う基準回数を記憶するイニシャル基準記憶部と、実行済みの基板処理回数記憶部と、基板処理レシピを実行する基板処理実行部と、イニシャルレシピを実行するイニシャル処理実行部と、基板処理回数を更新する処理回数更新部と、基板処理回数記憶部に記憶した基板処理回数が、イニシャル基準記憶部に記憶した基準回数に達したか否かを判定する処理終了判定部と、イニシャル処理可能状態であるか否かを判定するイニシャル可否判定部とを備え、基板処理回数が前記基準回数に達すると当該基板処理装置における新たな基板処理開始を保留し、イニシャル処理可能状態になるとイニシャルレシピを実行するよう基板処理装置を構成する。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
熱処理装置、熱処理方法及び記憶媒体
【課題】加熱板に基板を載置して熱処理するにあたり、加熱板の温度を速やかに降温すること。
【解決手段】加熱板84の下方側に加熱板84と略同じ大きさの2枚の冷却プレート81、82を水平に設け、下側の冷却プレート81は断熱部材を介して加熱板84に固定し、上側の冷却プレート82は下側の冷却プレート81に対して昇降できるように構成する。下側の冷却プレート81には冷媒流路88を設け、上側の冷却プレート82を下側の冷却プレート81に接触させて予め冷却しておき、加熱板84の温度を降温させるときには、上側の冷却プレート82を上昇させて加熱板84に接触あるいは近接させる。また、2枚の冷却プレート81、82を用いずに、冷媒流路88を備えた1枚の冷却プレートを加熱板84に接触あるいは近接させるようにしてもよい。
(もっと読む)
位置決めデバイスのためのコントローラ、位置決めデバイスを制御する方法、位置決めデバイスおよび位置決めデバイスを備えるリソグラフィ装置
【課題】ノイズ増幅への感度がより低い可変利得コントローラの提供が望まれている。
【解決手段】位置決めデバイスのためのコントローラは、位置決めデバイスの位置を示す位置信号を受信し、エラー信号を得るために位置信号を位置決めデバイスの所望の位置を示すセットポイント信号と比較し、変更されたエラー信号を得るためにエラー信号の振幅成分および周波数成分に基づいてエラー信号を選択的に変更し、位置決めデバイスを制御するための制御信号を変更されたエラー信号に基づいて生成するように構成される。このコントローラは、リソグラフィ装置の位置決めデバイスの制御に適用されてもよい。
(もっと読む)
位置測定システムのターゲット面を較正する方法、位置測定システム、およびリソグラフィ装置
【課題】可動オブジェクトの位置を測定するように構成された位置測定システムのターゲット面を較正する方法が用いられる。
【解決手段】位置測定システムは、可動オブジェクト上に設けられたターゲット面と、静止センサシステムと、センサシステムの少なくとも1つの測定信号に基づいて可動オブジェクトの位置を計算する処理デバイスとを含む。処理デバイスは、ターゲット面の凹凸を補正するターゲット面の補正マップを含む。当該方法は、ターゲット面を測定し、測定されたターゲット面ならびにターゲット面および/またはターゲット面に影響を及ぼす物理的オブジェクトの1つ以上の変形モードに基づいてターゲット面全体の再較正された補正マップを決定することによってターゲット面の補正マップを再較正することを含む。
(もっと読む)
研削装置
【課題】表面に凹凸を有するウェーハであっても回転する仮置きテーブルに対する位置ズレを抑制でき、ウェーハの位置を精度よく検出できる研削装置を提供すること。
【解決手段】ウェーハWを支持する支持面64を有する仮置きテーブル35と、支持面64に支持されたウェーハWの外周縁部を撮像する撮像部36と、仮置きテーブル35を支持面64に直交する鉛直軸まわりに回転させ、ウェーハWの外周縁部を順々に撮像部36の撮像範囲に臨ませる回転部61とを備え、仮置きテーブル35の支持面64は、回転によってウェーハWに作用する力よりも大きな摩擦力をウェーハWに付与する摩擦材65により形成される構成とした。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のアライメント方法、及び表示用パネル基板の製造方法
【課題】マスクのアライメントマークの位置及び基板の下地パターンのアライメントマークの位置を迅速に精度良く検出して、マスクと基板との位置合わせを短時間で高精度に行う。
【解決手段】マスク2と基板1とのギャップ合わせを行う間、第1の画像取得装置51の焦点位置をギャップ合わせ後のマスク2の下面の高さへ移動し、第2の画像取得装置52の焦点位置をギャップ合わせ後の基板1の表面の高さへ移動する。第1の画像取得装置51によりマスク2のアライメントマーク2aの画像を取得して、マスク2のアライメントマーク2aの位置を検出し、第2の画像取得装置52により基板1の下地パターンのアライメントマーク1aの画像を取得して、基板1の下地パターンのアライメントマーク1aの位置を検出する。
(もっと読む)
ウエハの位置合わせ装置及びウエハの位置合わせ方法
【課題】保持台の表面に異常があるか否かを早期に検出できる技術を提供すること。
【解決手段】ウエハWを保持台1に保持させ、当該保持台1を1回転以上回転させ、ウエハのW周縁位置を光センサ4により検出する。そして、この保持台1の回転方向の位置と光センサ4の受光出力との関係データを取得し、当該関係データに基づいてウエハの向き及び中心位置を検出する。さらに、前記関係データにおいて保持台の加速領域と減速領域に対応する実測データに基づいてウエハと保持台1に嵌め込まれた保持部材3との間で滑り現象が発生しているか否かを判定する。例えば前記関係データにおいて保持台1の等速領域に対応するデータに基づいて、前記滑り現象が生じていないときの、加速領域と減速領域におけるデータを推定し、推定されたデータと前記実測データとを比較して比較結果に基づいて前記判定を行う。
(もっと読む)
基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体
【課題】基板の周縁部に切欠きがある基板をフォークにより保持し、搬送するときに、基板位置のずれ量を精度よく検出でき、そのずれ量を容易に補正できるとともに、フォークの状態を同時に確認して補正できる基板搬送装置を提供する。
【解決手段】
基台と、基台から進退自在に設けられ、基板Wを保持する保持部3Aと、保持部3Aが基板Wを保持した状態で後退しているときに、保持部3Aが保持している基板Wの周縁部の位置を、それぞれ異なる位置で検出する4個以上の検出部5と、検出部5が周縁部の位置を検出した検出値に基づいて、検出部5のいずれかが基板Wの周縁部の切欠きが設けられた部分WNを検出したか否かを判定し、一の検出部5が切欠きが設けられた部分WNを検出したと判定したときに、一の検出部5以外の3個の検出部5の検出値に基づいて、次の処理ユニットに搬送するときに処理ユニットの基板Wの受渡し位置に補正する、制御部とを有する。
(もっと読む)
基板検知装置及び方法
【課題】基板に電圧を印加して基板にダメージを及ぼすことなく、当該基板における、大型基板において特に顕在化する複雑な態様の反りの発生部位及び発生状態を容易且つ正確に特定する。そして、大型基板でも確実なチャッキングに供することを可能とする。
【解決手段】センサ部2は、搭載面1aの中央部分に設けられた第1のセンサ群11と、第1のセンサ群11を囲む第2のセンサ群12と、第2のセンサ群12を囲む第3のセンサ群13とを有する。第1のセンサ群11は、基板面の中央部分に対応して設けられた1つの静電容量センサ10aから、第2のセンサ群12は、第1のセンサ群11を同心状に囲む複数の静電容量センサ10aから、第3のセンサ群13は、第2のセンサ群12を同心状に囲み、搭載面1aの周縁の近くに設けられた複数の静電容量センサ10aを有する。
(もっと読む)
フィルム露光装置及びフィルム露光方法
【課題】フィルムを連続露光する際のアライメントマークの形成が容易であり、フィルムの蛇行を精度良く補正して、安定的に露光できるフィルム露光装置及びフィルム露光方法を提供する。
【解決手段】フィルム基材20の幅方向の両側のフィルム基材送給用領域の少なくとも一方に側部露光材料膜を形成し、アライメントマーク形成部14により、露光光を照射してアライメントマーク2aを形成し、このアライメントマーク2aを使用して、フィルム蛇行を検出してマスク12の位置を調整する。
(もっと読む)
プラズマ処理装置
【課題】試料の搬送中に試料温度の測定を可能とし、測定した試料の温度に応じて試料の搬送を制御して搬送効率の低下を抑制する。
【解決手段】搬入された試料に所定のプラズマ処理を施すプロセスモジュール110と、カセットに格納された試料を取り出して前記プロセスモジュールに搬入し、プロセスモジュールにおいてプラズマ処理が施された試料を前記カセットに収納する搬送モジュール101を備えたプラズマ処理装置において、前記搬送モジュールは、試料を静電吸着する静電吸着部および吸着した試料の温度を測定する温度測定部を具備する搬送ロボット108と、搬送モジュールを制御するモジュールコントローラ113を備え、測定した試料の温度をもとに前記静電吸着部の吸着力を推定し、推定した吸着力をもとに搬送ロボットに許容される最大加速度を計算し、計算結果にしたがって搬送制御する
(もっと読む)
マスクの位置決め装置及びマスクの回転中心算出方法
【課題】マスクステージの回転中心の座標を精度良く求め、これによりマスクと基板との位置決めを高精度で行うことができるマスクの位置決め装置及びマスクの回転中心算出方法を提供する。
【解決手段】位置決め装置70は、回転機構16xを具備するマスクステージ10と、マスクM及び基板Wに設けられた複数のアライメントマークMm、Wmを検知するための複数のアライメントカメラ18と、アライメントカメラ18により得られた画像を用いて各アライメントマークMm、Wmの位置が合うようにマスクステージ10の動作を制御する制御装置71と、を備える。アライメントカメラ18は、各アライメントカメラ18にそれぞれ対応するアライメントマークMm、Wmを撮像し、マスクステージ10を回転させた後、各アライメントマークMm、Wmを再度撮影して、マスクステージ10の回転中心Eの座標を算出する。
(もっと読む)
ウェハ供給装置およびチップボンディング装置
【課題】省スペース性、チップ搭載性に優れたウェハ供給装置、および当該ウェハ供給装置を備えたチップボンディング装置を提供することを課題とする。
【解決手段】ウェハ供給装置5は、ウェハ搬送パレット50を備えている。ウェハ搬送パレット50には、ウェハシート61が搭載されている。ウェハシート61には、分割された複数のチップ620からなるウェハ62が貼り付けられている。ウェハ搬送パレット50における、ウェハシート61の搭載位置以外の部分には、廃棄されるチップ620を置く廃棄部品置場500が区画されている。
(もっと読む)
半導体集積回路装置の製造方法
【課題】半導体集積回路装置の製造工程のうちの組立工程におけるダイシング後のチップのピックアップ工程では、急速なチップの薄膜化によって、ピックアップ不良の低減が重要な課題となっている。特に、剥離動作によるチップ周辺部の湾曲がチップの割れ、欠けを惹起する可能性が高い。
【解決手段】これらの課題を解決するための本願発明は、ダイシング・テープ(粘着テープ)等からチップを吸引コレットで真空吸着して剥離する場合において、吸引コレットの真空吸着系の流量をモニタすることで、チップが粘着テープから完全に剥離する以前のチップの湾曲状態を監視するものである。
(もっと読む)
41 - 60 / 521
[ Back to top ]