
Fターム[5F031NA07]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 雰囲気管理 (4,208) | 雰囲気での出入り、搬送 (1,011)
Fターム[5F031NA07]の下位に属するFターム
搬送トンネル,クリーントンネル部 (101)
ゲート,シャッター部 (552)
Fターム[5F031NA07]に分類される特許
201 - 220 / 358
雰囲気置換方法
【課題】真空室においてパーティクルが基板に付着することを低減する雰囲気置換方法を提供する。
【解決手段】真空環境下で基板を処理する処理装置の真空室の雰囲気を置換する方法であって、前記真空室内に設置された保持ユニットで前記基板を保持する工程と、前記真空室の雰囲気を排気又は給気によって置換する工程とを有し、前記真空室の雰囲気を置換する工程では、前記真空室内に設置された集塵ユニットの温度が前記基板の温度よりも低い温度に調節された状態で、前記真空室の圧力を10Pa以上10000Pa以下の範囲で10秒以上600秒以下維持することを特徴とする。
(もっと読む)
搬送システム

【課題】解放式のカセットへのダストの侵入を防止し、クリーン度の低い空間でもカセットを保管・搬送できるようにする。また、シート材でラップしたカセットを用いて、処理装置へ物品を搬入するための具体的な構成を提供する。さらに、シート材のラップやアンラップを容易にできるようにする。
【解決手段】開放式のカセットにラッピング装置14でシート材をラップして周囲から気密にするとともに、アンラッピング装置10でシート材を剥がし、カセットに物品を出し入れできるようにする。
(もっと読む)
搬送装置
【課題】昇降動作のストローク量を大きく確保するとともに装置全体の高さを低く抑えることができる、低床型の搬送装置を提供する。
【解決手段】固定ベース1と、旋回ベース2と、この旋回ベース2を固定ベース1に対して昇降させる昇降機構3と、旋回ベース2を鉛直状の旋回軸Os周りに旋回させる旋回機構と、旋回ベース2に支持された直線移動機構5と、直線移動機構5に支持され、直線移動機構5の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド6A,6Bとを備えた搬送装置Aであって、昇降機構3は、固定ベース1に対してテレスコピック状に伸縮するように組み合わされた2段の昇降部材31,32と、各段の昇降部材をその下位段の部材に対して昇降させる第1および第2の昇降駆動機構33,34と、を備えて構成されており、かつ、旋回ベース2は、最上位段の昇降部材32に支持されている。
(もっと読む)
真空処理装置及び真空処理方法
【課題】製品の歩留まり向上が図られる真空処理装置を提供する。
【解決手段】任意のカセット3−1〜3−3内から大気搬送手段4によって抜き取った未処理試料2−1〜2−3を、大気雰囲気又は真空雰囲気に切り替え可能な室9、真空搬送手段8を介して、真空処理室7−1〜7−3に搬入する制御、真空処理室で処理された処理済試料2−4を待避カセット5に搬送する制御、任意のカセット内に未処理試料が存在しない状態で待避カセットから処理済試料を任意のカセットに戻す制御を行う制御手段とを具備した。
(もっと読む)
走査電子顕微鏡
【課題】
本発明は、静電チャックのクリーニングを容易にし、また静電チャック汚染による不稼働時間を低減可能な走査電子顕微鏡の提供を目的とする。
【解決手段】
上記課題を解決するために、電子ビームによる測定,観察を行うために予備排気室を経由して、試料を導入する電子顕微鏡において、前記予備排気室とは異なる静電チャックの交換室と、当該交換室を真空排気するための真空ポンプを備えた電子顕微鏡を提案する。このような構成によれば、静電チャックのために試料室を大気に戻す必要がなく、且つ静電チャックの清浄化を効果的に行うことが可能となる。
(もっと読む)
イオン注入システムにおけるウェハ保持ロボットのエンドエフェクタの垂直位置決定
【課題】 ウェハ処理ロボット、ウェハ処理ロボットを含むイオン注入システム、および関連する方法を開示する。
【解決手段】 イオン注入システムは、ロードロックが連結されたイオン注入ステーションと、ロードロック内に少なくとも部分的に位置しており、少なくとも1つのウェハを処理するエンドエフェクタとエンドエフェクタを垂直方向に動かすモータとを有するウェハ処理ロボットと、ロードロック内に位置して、エンドエフェクタの垂直位置を決定するセンサと、を備えうる。
(もっと読む)
高スループットの非プラズマ処理を行う処理システム及び方法
高スループットの非プラズマ処理を行う装置及び方法の実施例(100)が一般的に本明細書において記載されている。他の実施例も記載及び主張されている。 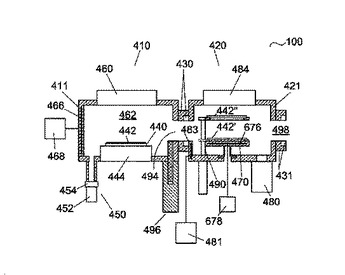 (もっと読む)
(もっと読む)
基板処理装置
【課題】基板処理におけるスループットの低下が抑制されつつ、露光装置内の汚染が十分に防止されるとともに、小型化が可能な基板処理装置を提供する。
【解決手段】基板処理装置500は、インデクサブロック9、反射防止膜用処理ブロック10、レジスト膜用処理ブロック11、レジストカバー膜用処理ブロック12、現像処理ブロック13、レジストカバー膜除去ブロック14、洗浄/乾燥処理ブロック15およびインターフェースブロック16を含む。これらのブロック9〜16は上記の順で並設される。インターフェースブロック16に隣接するように露光装置17が配置される。露光装置17においては、液浸法により基板Wの露光処理が行われる。洗浄/乾燥処理ブロック15は、洗浄/乾燥処理部80を有する。洗浄/乾燥処理部80には、基板の表面および端部を洗浄する表面端部洗浄/乾燥ユニットが設けられる。
(もっと読む)
真空処理装置及び真空処理方法並びに記憶媒体
【課題】搬送アームの負荷を軽減してスループットを高めると共に、ウエハを高い位置合わせ精度で真空処理室に搬送すること。
【解決手段】第1の搬送アームA1及び第2の搬送アームA2との間で、回転ステージ5を介してウエハの受け渡しを行い、真空処理前のウエハWに対して、前記回転ステージ5を回転させながら、ラインセンサ6を用いてウエハWの周縁の位置データを取得する。この位置データに基づいて、ウエハの中心とウエハの向きの位置を求め、このウエハの向きに基づいて、この向きを合わせるために前記回転ステージの回転を制御し、前記ウエハの中心位置に基づいて、このウエハの中心と真空処理室のウエハの載置部の中心とが一致した状態で、当該ウエハを前記載置部に受け渡すように前記第2の搬送アームA2を制御する。
(もっと読む)
自動倉庫
【課題】送風装置のメンテナンスのために必要なスペースを削減することができる自動倉庫を提供する。
【解決手段】自動倉庫1は、クリーンルーム内で用いられており、荷Wを収容する収容部2を複数有する収納棚3を備えている。そして、収容部2には、出し入れ口2aと腕木3cとが設けられている。また、収容部2の奥部には、開口部が設けられており、開口部にFFU12が取付けられている。FFU12は、ファン11とフィルタ10とが一つのケース内に収容されることで構成されている。また、FFU12は、フランジを備えるとともに、収容部2側に位置するボルトによって開口部に嵌め込まれた状態で締結されている。そして、FFU12を出し入れ口2aから出し入れすることによって、開口部及びネジ穴に対するFFU12の取外し及び取付けを行えるように構成されている。
(もっと読む)
基板処理装置
【課題】基板処理装置の内部に滞留している基板を、基板及び基板処理装置の損傷を抑制しつつ、自動的に短時間で回収する基板処理装置を提供する。
【解決手段】基板を処理する基板処理室と、複数枚の基板を収容する基板収納容器と基板処理室との間に設けられ内部の圧力を制御可能な予備室と、予備室内に設けられ基板収納容器と基板処理室との間で基板の搬送を行う搬送手段と、搬送手段の動作を制御する制御手段とを備え、制御手段は、基板処理装置内における基板の位置を示す位置情報を管理するとともに、搬送手段による搬送処理が中断されて位置情報を管理することが出来なくなった場合に、基板処理装置内に残留している基板を基板収納容器から近い順に基板収納容器内へ搬送させるように搬送手段の動作を制御する。
(もっと読む)
露光装置
【課題】半導体集積回路等のリソグラフィに用いられる露光装置に関し、ウエハステージにウエハを搬送する真空ロボットの振動を低減する露光装置を提供する。
【解決手段】ロードロック室15からのウエハを真空チャンバ11内のウエハステージ29に搬送する露光装置において、前記真空チャンバ11内に配置され前記ロードロック室15からのウエハを搬送する第1の真空ロボット25と、前記真空チャンバ11内に配置され前記ウエハを前記ウエハステージ29に搬送する第2の真空ロボット27とを備え、前記第1の真空ロボット25は前記第2の真空ロボット27とは独立に駆動されることを特徴とする。
(もっと読む)
半導体ウエハー及び液晶ガラスエアー浮上搬送装置
【課題】搬送対象物を浮上させる流体膜を吹き上げる多孔質体を用いることなく、流体膜の目詰まり等による搬送物浮上高の変動が生ずることをなくし、所定の浮上高を保つことが出来るようにする。被搬送物の周囲をクリーンな環境に保つことを課題の一つとして、被搬送物を浮上させるための流体をヘパフィルターを介して吹出させることにより、被搬送物の浮上と同時に被搬送物周囲へのクリーンエアの供給を可能としている。被搬送物端面への気流の吹き付けにより、被搬送物の所定方向へのガイドを可能とする。
【解決手段】半導体ウエハー及び液晶ガラス等の板状体よりなる被搬送物を浮上搬送する装置で、その搬送路下部に搬送路に向け被搬送物押出方向噴気流を噴出する噴気噴出手段を有するファンフィルターユニットを配し、前記被搬送物を浮上搬送すると共に、被搬送物周囲を清浄噴気流で囲うことによって、清浄空気の流れの雰囲気中で所定高さの浮上搬送を行う。
(もっと読む)
露光装置
真空の中で基板を放射エネルギーに曝す露光装置は、中に前記真空が形成されるチャンバーと、前記チャンバーの中に配された供給ノズルを含み、前記真空が形成された前記チャンバーの中に配された物体に対して前記供給ノズルを介してガスを噴射する噴射デバイスと、前記チャンバーの中に配された回収ノズルを含み、前記供給ノズルを介して前記チャンバー内に噴射されたガスを、前記回収ノズルを介して回収する回収デバイスとを備え、前記噴射デバイスから前記回収デバイスへ向かう方向とは逆の方向であって前記噴射デバイスによる噴射とは平行に前記物体が移動するように構成されている。 (もっと読む)
高生産性ウエハノッチアライメント装置
イオン注入装置、システム、および方法は、真空と大気圧との間において、複数のワークピースを搬送するために提供される。アライメント機構は、複数のワークピースを、複式ワークピースロードロックチャンバに対して略同時に搬送するために、位置合わせするよう機能する。アライメント機構は、評価装置、昇降装置、および、2つのワークピースを支持するための2つの垂直配向ワークピース支持部を備える。第1および第2大気ロボットは、ロードロックチャンバ、アライメント機構、およびFOUPの間において、一度に2つのワークピースを略同時に搬送するように構成されている。第3および第4真空ロボットは、ロードロックモジュールおよび処理モジュールの間において、一度に1つのワークピースを搬送するように構成されている。  (もっと読む)
(もっと読む)
真空装置
【課題】真空状態の処理室にて試料を処理する真空装置において、試料の搬送時間の短縮とフットスペースの削減を図る。
【解決手段】真空装置1に、個別に真空引きすることが可能な上下に連なる上室10及び下室20を設け、さらにこれらの間を開閉するゲートバルブ40と、試料Sを載置する試料台31と、試料台31を昇降させて2つの室10、20の一方から他方へと試料Sを搬送する昇降機構32とを設ける。
(もっと読む)
オーバーヘッド型搬送システム用搬送装置
電子部品またはディスプレイの製造領域から基板を搬送し、基板を処理装置(4)へ供給するために設けられている搬送装置(5)は、基板搬送ボックス(2)のためのオーバーヘッド型搬送システムに接続している第1の搬出入接続部(7)と、処理装置(4)に接続している第2の搬出入接続部(26)とを有している。第1の搬出入接続部(7)は鉛直方向に関し第2の搬出入接続部(26)の上方に配置されている。このような搬送装置(5)を用いて搬送ボックス(2)内で基板を搬送するようにリンクしている生産設備において、処理装置(4)に供給される基板の供給順序で優れた順応性が可能であるようにするため、基板を、搬送装置(5)内に配置されている操作装置(12)により、搬送ボックスから切り離して、一方の搬出入接続部(7または26)から他方の搬出入接続部(26、7)へ搬送可能にするための手段を設けることを提案する。  (もっと読む)
(もっと読む)
真空処理装置における処理対象物搬送方法
【目的】真空処理装置の高速タクトの実現を可能とする処理対象物搬送方法を提供する。
【解決手段】処理対象物が搬入された真空チャンバーは圧力が高真空側へ移行するように排気し、処理対象物が搬出された真空チャンバーは圧力が大気圧側へ移行するようにベントしつつ処理対象物を移送する。
(もっと読む)
真空処理装置
【課題】複数の処理室でのウエハ処理にぽいて、ウエハ面内の不均一を良くすることができ、処理の効率や歩留まりを向上させた真空処理装置を提供する。
【解決手段】減圧された内部に配置された処理対象の基板状の試料を処理可能な処理室を備えた複数の真空容器と、前記試料が複数収納可能なカセットが載置されるカセット台と、前記試料を前記カセットから一つの前記処理容器内の処理室に所定の経路に沿って搬送しこれら処理室で処理された試料を前記カセットに戻す少なくとも1つの搬送装置と、前記カセット台と前記複数の真空容器との間の前記経路上に配置され内部で前記試料を予め定められた位置に位置合わせする位置合せ装置とを備えた真空処理装置であって、前記位置合せ装置が、前記試料に施される処理に応じて異なる位置に前記試料を位置合わせする。
(もっと読む)
基板保管庫
【課題】カセットに収容される基板の入れ替え処理を行うと共に、カセットを適時に搬入出することができる自動倉庫を提案する。
【解決手段】基板保管庫1は、複数の基板Wを収容する気密蓋付カセット80を複数載置可能な多段棚5と、多段棚5の正面5a側に移動可能に配置されて多段棚5に載置された気密蓋付カセット80の気密蓋を開閉すると共に気密蓋付カセット80同士間において基板Wを搬送する基板搬送部20と、多段棚5の背面5b側に移動可能に配置されて多段棚5の全てのカセット載置位置5cに対して気密蓋付カセット80を搬入出するカセット搬送部30と、を備える。
(もっと読む)
201 - 220 / 358
[ Back to top ]