
Fターム[5F031NA07]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 雰囲気管理 (4,208) | 雰囲気での出入り、搬送 (1,011)
Fターム[5F031NA07]の下位に属するFターム
搬送トンネル,クリーントンネル部 (101)
ゲート,シャッター部 (552)
Fターム[5F031NA07]に分類される特許
141 - 160 / 358
リソグラフィマシン及び基板処理構成体
複数の荷電粒子リソグラフィ装置を具備する構成体であって、各荷電粒子リソグラフィ装置は、真空チャンバ(400)を有する。この構成体は、複数のリソグラフィ装置にウェーハを運搬するための共通のロボット(305)と、夫々の真空チャンバ(400)の前面に配置された、各荷電粒子リソグラフィ装置のためのウェーハロードユニット(303)とをさらに具備する。複数のリソグラフィ装置は、これらリソグラフィ装置の前面が、各装置にウェーハを運搬するための共通のロボット(305)の通路を収容している通路(310)を面している状態で、列をなして配置され、各リソグラフィ装置の後面は、アクセス通路(306)に面し、各真空チャンバの後壁には、夫々のリソグラフィ装置へのアクセスのためのアクセスドアが設けられている。 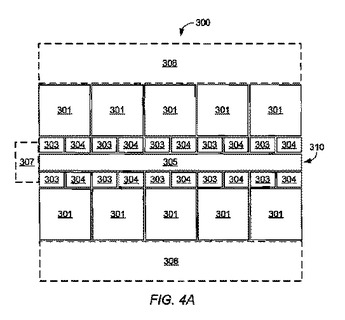 (もっと読む)
(もっと読む)
半導体製造装置

【課題】一時待機空間の気圧がウエハ搬送空間の気圧よりも高くなる所望の気圧分布を実現できる半導体製造装置を提供する。
【解決手段】本発明の半導体製造装置は、ロードロック10により区画された一時待機空間が設けられ、その一時待機空間から内部(処理空間)へ移動された半導体ウエハに対して処理を実行する処理装置1と、ウエハ収納容器2が設置されるローダー3と、半導体ウエハが搬送されるウエハ搬送空間へ清浄化された気体を供給する清浄化装置6と、清浄化装置6から噴出する気体を一時待機空間とウエハ搬送空間へ分けて送るとともに、一時待機空間の気圧がウエハ搬送空間の気圧よりも高くなるように、一時待機空間とウエハ搬送空間へ送り出す気体の量を制御する気流制御装置14と、を備える。
(もっと読む)
搬送チャンバ及びパーティクル付着防止方法

【課題】被処理基板にダメージを与えずに被処理基板を除電して被処理基板への静電気力によるパーティクル付着を防止することができる搬送チャンバ及びパーティクル付着防止方法を提供する。
【解決手段】基板処理システム1において、基板処理部2と大気系搬送部3との間に設けられる搬送チャンバ4は、被処理基板であるウエハWを収容するチャンバ本体51を備えている。チャンバ本体51は、給気システム52と排気装置53によって減圧環境と大気圧環境とで切り替え可能である。給気システム52は、チャンバ本体51の外側に、イオン化ガスを発生させるイオン化装置60を備えている。イオン化装置60で発生させたイオン化ガスをチャンバ本体51に供給して、チャンバ本体51に収容されたウエハWを除電する。
(もっと読む)
ストッカー装置及び基板処理装置
【課題】
装置の大型化を抑えることができるとともに、効率良く基板の払出及び回収が行えるストッカー装置及び基板処理装置を提供する。
【解決手段】
基板処理装置本体1に対して基板の払出及び回収を行うために、複数枚の基板を収納する容器であるフープFを載置するオープナー10a〜10dと、フープFを把持して搬送する搬送機構と、オープナー10a〜10dの上方に位置してフープFを載置する棚20とを備え、棚20は、外部搬送装置からフープFを受け取るための受取棚21と、外部搬送装置にフープFを引き渡すための引渡棚22と、基板Wが払出された後の空になったフープFを保管する処理中用保管棚BF1、BF2とを含み、オープナー10a〜10dは、基板Wを払出すための払出専用オープナー10a、10bと、基板を回収するための回収専用オープナー10c、10dとを含むことを特徴とする。
(もっと読む)
真空処理装置
【課題】真空搬送室内において基板搬送手段を冷却する冷却ブロックを設けることにより、基板搬送手段における蓄熱を防止することである。
【解決手段】予備真空室(ロードロック室22,23)と複数の真空処理室25A〜25Dとの間で基板を搬送するために真空搬送室(第2の搬送室24)に設けられた基板搬送手段(第2の搬送アーム3)を備え、前記第2の搬送室24内における加熱した状態で真空処理が行われる真空処理室25B,25Cの搬送口に臨む位置において、前記第2の搬送アーム3の保持アーム33が前記真空処理室25B,25Cに対して進退するときに、その表面が当該保持アーム33に接近して設けられると共に、その表面を冷却するための冷却手段を備えた冷却ブロック51を設けると共に、前記保持アーム33と前記冷却ブロック51の表面との間に熱伝導ガスを供給するための熱伝導ガス供給手段を設ける。
(もっと読む)
基板反転装置、真空成膜装置及び基板反転方法
【課題】真空中で迅速に基板を反転させる技術を提供する。
【解決手段】本発明の基板反転装置20は、真空槽であるチャンバー21内において、基板50を昇降させる昇降機構60と、基板50を挟んで保持する把持部41a、42aを有する基板保持機構4A〜4Dと、基板保持機構4A〜4Dの把持部41a、42aを回転させて基板50の上下関係を反転させる基板回転機構30とを有する。本発明においては、基板50を保持した状態で、水平方向に延びる直線を回転軸として基板回転機構30を180°回転させる。
(もっと読む)
基板装填脱装方法および半導体装置の製造方法
【課題】キャリアの開放時における基板への自然酸化膜の堆積やパーティクルの付着、基板搬送室の汚染や酸素濃度の上昇等の弊害の発生を防止する。
【解決手段】ポッド10の収納室10cからウエハ9を取り出す際に、収納室10cの出し入れ口10bを塞ぐ蓋体10aを出し入れ口10bから移動させ、出し入れ口10bが開かれ、ポッド10と連設されたポッドオープナ室61を密封した状態で、ポッドオープナ室61へ不活性ガスを流し、収納室10cに不活性ガスを供給する。空のポッド10の収納室10cにウエハ9を収納する際に、空のポッド10の収納室10cにウエハ9を収納する前に、収納室10cの蓋体10aを出し入れ口10bから移動させて、出し入れ口10bを開き、ポッドオープナ室61を密封した状態で、ポッドオープナ室61に不活性ガスを流し、収納室10cに不活性ガスが供給する。
(もっと読む)
半導体装置の製造方法およびウェハ処理システム
【課題】ドライエッチング加工を行ったウェハにおけるデガスの影響による異物の発生を低減する。
【解決手段】半導体装置の製造方法は、各ウェハ150を略水平にして複数のウェハ150を上下に並べて収容するとともに、側方に設けられたドア104を含む収納容器100に、ドライエッチング加工が行われた複数のウェハを順次収容する工程と、ドア104が開いた状態で、収納容器100に収容すべきすべてのウェハ150が当該収容容器に収容されてから30秒以上、収納容器100内のウェハ150に対して水平方向からパージガスを吹き付ける工程と、を含む。
(もっと読む)
基板処理装置及び基板処理装置における表示方法
【課題】搬送中のキャリアやボートの位置、搬送元、搬送先の把握を容易とする。
【解決手段】基板を搬送する搬送系と、搬送系の動作状態を操作画面に表示する操作部と、搬送系の動作を制御する制御部と、を備え、操作部は、搬送系の搬送元に対応する操作画面内の所定位置に搬送対象である搬送系を示す搬送系アイコン及び搬出中アイコンを表示し、搬送系の搬送先に対応する操作画面内の所定位置に搬入中アイコンを表示する。
(もっと読む)
真空被膜システムおよび真空被膜システムを動作させるための方法
本発明は、排気され得る少なくとも1つのプロセスチャンバ(02)と、少なくとも1つの入口開口(10)および少なくとも1つの出口開口(11)とを備える真空被膜システム(01)に関する。プロセスチャンバ(02)を通過しながら被膜されるウェハ要素(03)は、入口開口(10)および出口開口(11)を経てプロセスチャンバ内に送り込まれ、かつそこから取出されることができる。パドルバルブ閉止経路に沿って開放位置と耐圧に閉止される位置との間で調節され得るパドルバルブ(08,09)は、入口開口(10)および出口開口(11)上にそれぞれ設けられる。ウェハ要素(03)を搬送する目的で、少なくとも3つの搬送装置(04,05,06,07)を有する搬送システムが設けられ、第1の搬送装置(04,17)は入口開口(10)の上流に配置され、第2の搬送装置(05,17)はプロセスチャンバ(02)内に配置され、第3の搬送装置(06,17)は出口開口(11)の下流に配置される。各搬送装置(04,05,06,17)は、ウェハ要素(03)を上方から載置し、かつ、搬送要素(14,18)を回転駆動することによりウェハ要素(03)を搬送方向(07)に真空被膜システム(01)内を通して引き渡すことのできる、少なくとも1つの回転搬送要素(14,18)を備える。搬送システムは、入口開口(10)および/または出口開口(11)に調節可能な移動搬送装置(12,13,16)を有し、移動搬送装置は、移動位置とアイドル位置との間で調節可能であり、移動搬送装置(12,13,16)の移動位置においては、ウェハ要素(03)を、開放されている入口開口または開放されている出口開口を経て、1つの搬送装置(04,05,06,17)から引き渡し方向(7)の下流の次の搬送装置に移動させることができ、移動搬送装置(12,13,16)のアイドル位置においては、パドルバルブ閉止経路に沿って関連のパドルバルブ(08,09)を調節することにより、入口開口(10)および/または出口開口(11)を開放または閉止することができる。  (もっと読む)
(もっと読む)
吸着ハンド及びこれを用いたウェーハ搬送装置
【課題】大型のウェーハの裏面を真空吸着して保持する吸着ハンドにおいて、ウェーハの自重による変形および真空吸着力による局所的な変形を抑制する。
【解決手段】ウェーハを吸着するための吸着部を有し、この吸着部と前記ウェーハの裏面との間に減圧部を生じさせることにより前記ウェーハを吸着して保持する吸着ハンドであって、前記吸着部を3か所以上設け、これらの吸着部の中心を頂点とする多角形の内側に前記ウェーハの中心が位置し、且つ前記吸着部が前記ウェーハの外周の内側に位置するように前記ウェーハを保持する。
(もっと読む)
真空処理装置
【課題】複数のウエハーを搬送し、真空処理するための手段を提供する。
【解決手段】本発明の真空処理装置によれば、複数の指156を有するハンド部155を搬入用真空槽112a内に設けておき、大気雰囲気中で各指156上に複数の基板31を両端をはみ出した状態で配置し、搬入用真空槽112a内を真空排気し、処理用真空槽113と接続してハンド部155を処理用真空槽内に移動させる。処理用真空槽113内には複数の横棒162を有する昇降機構161を設けておき、横棒162を上方に移動させ、一本の指上の基板の両端を二本の横棒に載せて降下させ、載置台165に載せて真空処理を行う。ピンやトレイを使用せずに搬出入できる。
(もっと読む)
基板処理装置
【課題】 基板の搬送効率を高め、基板処理工程の生産性を向上させる。
【解決手段】 複数枚の基板を保持するロードロック室と、ロードロック室内に連通可能な第1搬送室と、第1搬送室内に連通可能で基板を処理する第1処理室と、第1搬送室内に連通可能な中継室と、中継室内に連通可能な第2搬送室と、第2搬送室内に連通可能で基板を処理する第2処理室と、ロードロック室、第1処理室、中継室間での基板の搬送を行う第1搬送ロボットと、中継室、第2処理室間での基板の搬送を行う第2搬送ロボットと、第1搬送ロボットによる第1処理室内外への基板の搬送時間帯が、第2搬送ロボットによる第2処理室内外への基板の搬送時間帯と少しでも重なり合うように、第1搬送ロボット及び第2搬送ロボットを制御する制御部と、を備える。
(もっと読む)
被処理体の処理装置
【課題】処理容器内にて被処理体を回転させながら処理する処理装置を提供する。
【解決手段】基板処理装置10は、処理源155を用いて内部にて基板Gを処理する処理容器100と、処理容器100の壁部に配設され、基板Gを処理容器内に搬入又は処理容器内から搬出する複数のバルブVと、処理容器100の底面に対して鉛直方向の中心軸Oを中心に点対称に配置され、処理容器内にて中心軸Oを中心に回転可能な複数のステージ110a,110bと、複数のステージ110a,110bを支持し、複数のステージ110a,110bのうちのいずれかのステージを複数のバルブのうちのいずれかの搬送口近傍まで回転させるタイミングに併せて、複数のステージ110a,110bのうちの他のいずれかのステージを複数のバルブVのうちの他のいずれかのバルブVの近傍まで回転させるステージ支持部材115と、を有する。
(もっと読む)
チャージ−ディスチャージロック内の圧力を下げるための方法および関連装置
本発明は、装置チャージ−ディスチャージロック内の圧力を大気圧から大気圧より低い移送圧力に下げるための方法に関し、前記ロックは、少なくとも1つの基板が大気圧で配置されるチャンバを備え、前記方法は、ポンピングレートが限定されている一次ポンプを使用して、前記チャンバのターボ分子ポンピングを隔離しながら大気圧から第1の特性閾値への第1の一次ポンピングが実行される第1のステップ101と、ターボ分子ポンピングの隔離を維持しながら前記第1のステップの場合より速く第2の特性閾値への第2の一次ポンピングが実行される、前記第1のステップ101に続く第2のステップ102と、第1のポンピングから上流で前記ターボ分子ポンピングを使用して第2のポンピングが実行され、一次ポンプチャンバが隔離される、前記第2のステップ102に続く第3のステップ103とを備える。本発明はまた、本方法を実装するための装置に関する。  (もっと読む)
(もっと読む)
基板処理装置のセットアップ方法。
【課題】処理炉を複数備える基板処理装置の運用を開始させる際のセットアップ工程の所要時間を短縮させる。
【解決手段】複数の処理炉制御部PMC1,PMC2を統合制御部90及び第1の操作部100からそれぞれ切り離し、擬似統合制御部及び第2の操作部を備えたテスト端末を複数の処理炉制御部にそれぞれ接続し、第2の操作部から複数の処理炉制御部へ、擬似統合制御部を介してテスト動作命令を送信させ、テスト動作命令を受信した複数の処理炉制御部により、複数の処理炉PM1,PM2の動作を並行してテストさせ、複数の処理炉制御部から第2の操作部へ、擬似統合制御部を介してテスト動作報告を送信させる。
(もっと読む)
真空処理装置
【課題】生産性を向上させた真空処理装置を提供する。
【解決手段】減圧された内部のプラズマを用いて試料が処理される複数の真空処理容器と、真空処理容器がその周囲に連結されその内部が減圧されて前記試料が搬送される搬送室と、該搬送室と連通され真空側と大気側とで前記試料がやりとりされる複数のロック室と、前記搬送室内に配置され前記ロック室と前記複数の真空処理容器内の処理室との間で前記試料を搬送する真空搬送手段と、前記ロック室の大気側で内部に大気圧下で前記試料を搬送する空間を有した大気搬送容器と、該大気搬送容器内の空間に配置されカセットから前記試料を搬送する大気搬送手段と、複数の前記試料を定められた滞留時間を含み前記カセットから搬出し前記処理室で処理された後該カセットに戻すまでの複数の動作の予定情報に基づいて前記動作を調節する制御装置とを備えた真空処理装置。
(もっと読む)
搬送機構の制御方法、基板処理装置、及び記憶媒体
【課題】搬送機構を長時間停止させておいた場合でも、初回駆動時にエラーを起こし難い搬送機構の制御方法を提供すること。
【解決手段】ロードポートと、ロードポートに接続された搬入出室と、搬入出室に接続されたロードロック室と、ロードロック室に接続された搬送室と、搬送室に接続された複数の処理室と、搬送室に設けられ、被処理基板を搬送する搬送機構と、を備えた基板処理装置の搬送機構の制御方法であって、被処理基板がロードポートに到着した後、かつ、被処理基板が搬送室に移送される前に、搬送機構を微少駆動させる。
(もっと読む)
シザーリフト搬送ロボット
真空環境内で使用されるかもしれない搬送ロボットのための方法及び装置が説明される。搬送ロボットは、第1プラットホームと、複数の支持部材によって第1プラットホームに結合される第2プラットホームを含むリフトアセンブリを含み、複数の支持部材は、支持部材の第1組と、支持部材の第2組を含み、搬送ロボットは、複数の支持部材の一部に結合される第1駆動アセンブリを更に含み、第1駆動アセンブリは、複数の支持部材に動力を提供し、これによって第1プラットホームに対して第2プラットホームを第1直線方向に動かし、搬送ロボットは、第2プラットホーム上に配置され、第2駆動アセンブリによって第2直線方向に可動なエンドエフェクタを更に含み、第2直線方向は、第1直線方向に対して直角である。  (もっと読む)
(もっと読む)
基板位置合わせ装置及び基板処理装置
【課題】パーティクルの発生を抑制でき、コンパクトで寿命の長い基板位置合わせ装置を提供する。
【解決手段】基板Wが基準点に一致するように基板の位置合わせを行う基板位置合わせ装置100は、それぞれの軸方向に平行な回転軸を中心に回転する複数の支柱103と、複数の支柱を同一方向に同一角度だけ同期して回転させる駆動機構と、基板の前記基準点からのずれ量を検出する検出器と、複数の支柱の上面部にそれぞれの回転軸からずらして配置されていて、基板を支持する支持ピン101とを具備し、検出器で検出された位置ずれ量に基づき駆動機構により複数の支柱を同一方向に同一角度だけ同期して回転させることにより、基板の位置合わせを行うことを特徴とする基板位置合わせ装置。
(もっと読む)
141 - 160 / 358
[ Back to top ]