
Fターム[5H004GA04]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 定常特性改善 (87)
Fターム[5H004GA04]に分類される特許
41 - 60 / 87
モデル不一致を補償するためチューニング可能積分コンポーネントを備えるモデル予測コントローラ
MPCコントローラ技法はMPCタイプのコントローラで今日一般的に使われている方法より良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法より良好に機能するMPCコントローラをもたらす。具体的には、チューニング可能積分ブロックをMPCコントローラに加えることでMPCコントローラの性能が強化される。このチューニング可能積分ブロックは、予測誤差や他の制御誤差を示す積分コンポーネントを形成し、このコンポーネントをMPCコントローラアルゴリズムの出力へ加えることで、予測誤差のそもそもの究極的理由であるモデル不一致の存在下でより迅速又は良好な制御を提供する。この技法により、MPCコントローラはより速やかに反応し、且つMPCコントローラのロバスト性を低下させることなく、モデル不一致の存在下でより良好な設定点変更及び負荷変動性能を提供することが可能となる。  (もっと読む)
(もっと読む)
移動体の駆動制御方法、露光方法、ロボット制御方法、駆動制御装置、露光装置、及び、ロボット装置
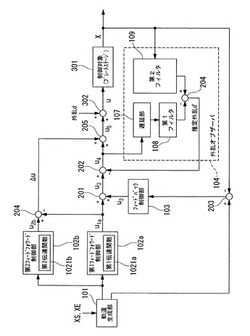
【課題】制御対象モデルに基づくフィードフォワード制御と外乱オブザーバとを利用して高精度な位置制御を行う。
【解決手段】駆動制御装置は、制御対象(301)の伝達特性の逆システムの一部を示す第1伝達関数(1021a)に第1の完全追従制御法を適用させることで第1のフィードフォワード信号(S1a)を求める第1フィードフォワード制御部(102a)と、制御対象(301)の伝達特性の逆システムの一部を示すとともに第1伝達関数(1021a)とは異なる第2伝達関数(1021b)に第2の完全追従制御法を適用させて第2のフィードフォワード信号(S1b)を求める第2フィードフォワード制御部(102b)と、第1のフィードフォワード信号(S1a)に対する第1の補償信号(d')を求める外乱オブザーバ(104)と、を備え、第2のフィードフォワード信号(S1b)と第1の補償信号(d')とから求めた第2の補償信号(S5)を用いて制御対象(301)を駆動する。
(もっと読む)
エネルギ消費効率を制御するシステム及び方法

制御装置は、ビルディングオートメーションシステムと情報を交換するように構成されている。制御装置は、実時間の動作効率を決定して、予測又は理論上の動作効率をシミュレートして、これらを比較して、次に、建物のHVACシステムによって利用されている機器に対する1つ以上の動作パラメータを調節するために、様々な実行可能命令を含んでいる。制御装置は、HVACシステムの動作効率を調節するように動作する。制御装置によって利用される調節モジュールは、様々なHVACの機器が、自然動作曲線近くで、オンラインで、並列に動作する可能性に基づいて、HVACの機器のパラメータを修正し得る。更に、調節モジュールは自己学習の態様を含み得る。自己学習の態様により、制御装置は、同様の将来の調節を必要に応じてより効率的に行うことができる。 (もっと読む)
温度制御方法、温度制御装置および温度制御用プログラム
【課題】反応プロセスにおいて、反応状態の変化など不測な外乱が生じた場合でも良好な温度制御性を確保できる温度制御方法、温度制御装置および温度制御用プログラムを提供する。
【解決手段】反応塔のように反応容器内に温度分布を持ち、反応容器内を流体が入口方向から出口方向に向かって流れる反応プロセスの多点温度制御において、操作量と制御量の関係を表した予測モデルに、流動による温度検出部位間の熱伝達を考慮したモデルを設けて予測制御することで、反応状態の変化など不測な外乱が生じた場合でも良好な温度制御性を得ることができる。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、複数のゾーンZ1,Z2のうち予め規定されたゾーンの制御の整定状態を検出したときに、整定時の各ゾーンZ1,Z2の操作量MV1,MV2と整定時の操作量総和MV_allとの比に応じて、予め規定された操作量総和下限値OL_allを各ゾーンに配分し、この配分した値を各ゾーンの操作量下限値OL1,OL2とする下限値配分部32−1,32−2とを備える。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、操作量総和MV_allが予め規定された操作量総和下限値に到達してこの下限値以下になったときに、操作量MV1,MV2を、到達が生じた時点の操作量MV1,MV2に基づく値に固定する操作量固定部32−1,32−2とを備える。
(もっと読む)
制御装置
【課題】偏差が小さな領域における制御応答性を向上させることができる制御装置を提供する。
【解決手段】偏差が0<偏差<閾値記憶部11の閾値となる領域では、固定値記憶部13に記憶された固定値がランプ関数発生器18を介して加算器5に供給されるので、一般的な制御方法に比べて目標値により急速に収束することになる。そして、偏差が閾値記憶部15に記憶された固定値<偏差<0となる領域、すなわち、目標値を超えた領域においても、固定値記憶部17に記憶された固定値がランプ関数発生器18を介して加算器5に供給されるので、一般的な制御方法に比べて目標値により急速に収束することになる。すなわち、偏差が小さな領域でのゲインが高くなり、応答性が向上する。
(もっと読む)
制御装置、温度調節器および目標値加工装置
【課題】非干渉化による制御性能の悪化を抑制できるようにすることを目的とする。
【解決手段】非干渉化部4で非干渉化に用いる干渉行列Gpの逆行列Gp−1に、不所望な値の項が生じているか否かを判定部7で判定し、生じているときには、補正部8で逆行列Gp−1を補正し、この補正した逆行列を用いて非干渉化するので、前記不所望な項、例えば、絶対値が非常に大きな項に起因する操作量の発振や定常偏差を抑制して制御性能を改善する。
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
モデル不一致を補償するためのチューニングを有する頑健な適応モデル予測コントローラ
MPC適応およびチューニング技法は、MPCタイプコントローラにおいて今日一般に使用される方法に比べて良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法に比べて良好に働くMPC適応/チューニング技法をもたらす。MPCコントローラ性能は、コントローラ適応/チューニングユニットをMPCコントローラに追加することによって高められ、その適応/チューニングユニットは、最適化ルーチンを実施して、特定の量のモデル不一致またはある範囲のモデル不一致の存在下でオンラインプロセス制御中にMPCコントローラ内で使用するための、最良のまたは最適な一組のコントローラ設計および/またはチューニングパラメータを確定する。適応/チューニングユニットは、以前に確定されたプロセスモデルおよび既知のまたは予想されるプロセスモデル不一致またはプロセスモデル不一致範囲に基づいて、たとえば、MPC形態、MPCコントローラおよび観測器のいずれかまたは両方についてのペナルティ因子、およびMPCコントローラで使用するためのコントローラモデルを含む、1つまたは複数のMPCコントローラチューニングおよび設計パラメータを確定する。閉ループ適応サイクルは、予測誤差または制御誤差に対して自己相関解析を実施して、有意のプロセスモデル不一致がいつ存在するかを判定してもよく、または、所定期間にわたって、プロセスモデル不一致の増減を判定してもよい。  (もっと読む)
(もっと読む)
ファジィ制御装置、プラントシステム、および、ファジィ制御方法
【課題】制御ルールをもとにファジィ制御を行うプラントシステムにおいて、制御精度の向上、および、制御ルールの調整期間の短縮化をすること。
【解決手段】ファジィ制御装置13は、制御ルール空間から制御が悪化する可能性の有る悪化制御ルール空間を決定する悪化制御ルール空間決定機構7と、悪化制御ルール空間から、全プラントに対する制御ルールを示す1本の遺伝子を作成する制御ルール抽出機構8と、制御ルール抽出機構8が絞り込んだ制御ルールに基づいて各プラントを制御した制御結果を、所定の評価関数で評価する評価機構4と、評価機構4の評価結果に基づいて、各プラントの制御中に、制御ルール抽出機構8が作成した遺伝子を遺伝的アルゴリズムにより最適化する遺伝的操作機構10と、を有する。
(もっと読む)
液圧作動ブームの調整方法、装置およびコンピュータプログラム
本発明は、液圧作動ブームの動作を調整する方法および装置ならびにコンピュータプログラムに関するものであり、ブーム(1)は、液圧アクチュエータ(5a〜5b、7a〜7b)によって相対的に動くように連結された少なくとも2つの可動的相互連結ブーム部(1a、1b)と、液圧アクチュエータを制御する制御手段(13、14)と、ブーム部(1a、1b)間の位置を検出する検出器(15)とを含み、それにより、ブーム(1)の動作を調整するために、制御手段にある継ぎ手制御装置の、動きに固有の調整パラメータを個々の動きごとに設定することができる。本発明では、ブーム部(1a、1b)の相対的動きをブーム部(1a、1b)間の所定の位置に対してその両側において制御し、制御信号に応じて検出器(15)から取得した実際の位置および運動速度の値を理論上の位置および運動速度の値と比較し、これらの値の間の差に基づいて継ぎ手制御装置の調整パラメータを調整する。 (もっと読む)
フィードバックループの制御方法
【課題】従来のフィードバックループの制御方法は、フィードバックループのループゲインを固定値としているので、動特性と静特性とを両立することができず、動特性及び静特性のいずれか一方を犠牲にする必要がある。
【解決手段】本発明によるフィードバックループの制御方法は、制御偏差εである角度差Nθ−φに対応した処理信号KE1sin(Nθ−φ)の大きさを監視し、この処理信号KE1sin(Nθ−φ)の大きさに応じて第1及び第2ループ内増幅器107,108のいずれか一方のみを接続状態とすることで、回転位置信号変換回路100のループゲインを第1ゲイン107aと第2ゲイン108aとで切り替える。
(もっと読む)
多入力多出力系の制御装置
【課題】この発明は、多入力多出力系の制御装置に関し、比較的簡便な線形モデルを用いて、多入力多出力の制御系の問題を良好に扱えるようにすることを目的とする。
【解決手段】ECU30内に、二次電池28に印加される電流Ibおよび当該二次電池28の冷却のための冷却温度Tcをモデル入力情報とし、二次電池28の電池電力Pbおよび電池温度Tbをモデル出力情報とする線形モデル50を構築する。当該線形モデル50を表した線形式((1)式参照)中のモデルパラメータa11等を、当該線形式を利用した逐次学習によって取得する。
(もっと読む)
プロセス制御方法およびプロセス制御システム
【課題】圧延設備における板厚制御のような特性を有するプロセスの制御について、より安定的な制御を行えるようにする。
【解決手段】入力量Aと入力量Bがあり、影響係数が入力量Aに相関しているプロセス31を制御対象とし、当該制御対象プロセスの状態量33からの制御量38による積分制御を含むフィードバック制御を入力量Bに対して行うようにされているプロセス制御方法について、第1の積分器55と第2の積分器56を第1の入力量の状態に応じて使分けることで得られる第1の積分器からの第1の積分出力58と第2の積分器からの第2の積分出力59によりフィードバック制御の制御出力60を得ることにより、第1の入力量が一定に保たれる定常領域について、先行の定常領域での制御出力が後続の定常領域に影響するのを抑制することで、より安定的な制御を行えるようにしている。
(もっと読む)
位置制御装置
【課題】位置制御装置における摩擦外乱を適切に補償できるようにする。
【解決手段】移動方向信号出力部27は、移動体の移動方向を判定し、その移動方向に応じた信号を出力する。移動方向信号出力部27の一方の移動方向に応じた信号をフィルタ処理する第1フィルタ回路25と、移動方向信号出力部27の他方の移動方向に応じた信号をフィルタ処理する第2フィルタ回路26を設けて外乱相殺フィードフォワード補償器(FFC)を構成する。第1フィルタ回路25は、無駄時間回路部21と正方向フィルタ23とから構成し、第2フィルタ回路26は、無駄時間回路部22と負方向フィルタ24とから構成する。正方向フィルタ23、負方向フィルタ24を通過した出力Yp 、Ym を足し合わせてFFC指令を求め、このFFC指令をモータ(駆動源)への位置指令に足し合わせて該位置指令を補償する。
(もっと読む)
被処理物の熱処理装置
【課題】 制御の追従性と定常特性の向上を図ることができる被処理物の熱処理装置を提供する。
【解決手段】 被処理物を熱処理する熱処理炉4と、熱処理炉を制御するための複数の設定値と複数の制御部選択信号を出力するシーケンサ10と、熱処理炉の複数の制御量を制御するために構成されている複数の制御系ループとを備え、各制御系ループに、前記シーケンサからの設定値と前記熱処理炉からの制御量とに基づいて操作量を出力する複数の制御部と、複数の制御部から出力される操作量のうち1つをシーケンサ10からの制御部選択信号に従って選択して熱処理炉4に出力する切替器3−1,3−2,3−3とをそれぞれ備えた被処理物の熱処理装置において、シーケンサ10は、複数の制御系ループの制御構成の切替をそれぞれ独立して行うための手段を有する。
(もっと読む)
XYステージ
【課題】ステージの機械的な特性に基づく位置決め誤差を補正できるXYステージを実現する。
【解決手段】XYステージにおいて、下軸リニアモータの軸方向及び上軸リニアモータの軸方向の所定距離毎のロール角,ピッチ角,ヨー角を測定して収集する第1データ収集手段及び第2データ収集手段と、前記第1データ収集手段の収集データ及び前記第2データ収集手段の収集データに基づいてロール角,ピッチ角,ヨー角の変化を関数で近似する第1関数化手段及び第2関数化手段と、前記第1関数化手段及び第2関数化手段の関数に基づいて下軸及び上軸の垂直真直度と水平真直度を演算する第1積分演算手段及び第2積分演算手段と、前記位置指令値、前記第1関数化手段及び第2関数化手段の関数データ、前記第1積分演算手段及び第2積分演算手段の垂直真直度と水平真直度データに基づいて、前記上軸スライダの絶対座標位置を演算する絶対座標位置演算手段と、を備える。
(もっと読む)
フィードバック制御装置及びフィードバック制御方法
【課題】制御対象の動作状態を検出する状態検出器の精度が悪化しても、制御対象に発生する振動を悪化前と同等のレベルに抑制することが可能なフィードバック制御装置及びフィードバック制御方法を提供する。
【解決手段】フィードバック制御装置100を、レゾルバ信号に基づいて、回転軸の回転位置及び回転速度を算出するレゾルバ信号処理部10と、レゾルバ信号処理部10からの回転速度信号に基づき、フィルタリングを行うか否かを判断する判断部11と、モータの制御信号を生成する制御信号生成部12と、レゾルバ信号処理部10からのフィードバック信号から誤差成分の周期情報を検出する誤差周期検出部13と、回転位置指令信号又はフィードバック信号における誤差成分の周波数を算出する誤差周波数算出部14と、誤差周波数算出部14で算出した周波数に対応するフィルタを用いて制御信号をフィルタリングするフィルタリング部15とを含んだ構成とした。
(もっと読む)
制御方法及び制御装置
【課題】モータを高効率に駆動するために好適な制御方法を提供すること。
【解決手段】印刷装置は、記録ヘッドを搭載したキャリッジを、主走査方向に往復運動させ、キャリッジの往復運動に合わせて、用紙を挟持するローラをLFモータにより駆動して、用紙を所定量ずつ送り出し、用紙に画像を形成する。この装置のLFモータ制御部35は、用紙位置y(t)を検出する位置検出部351と、LFモータへの操作量u(t)を算出する操作量演算部353と、操作量u(t)の演算に用いるパラメータθiを、用紙位置y(t)に基づき補正するパラメータ更新部355と、を備える。また、操作量演算部353は、最大速度V及び加速時間Tで定められる目標位置r(t)に基づき、操作量u(t)を算出する。
(もっと読む)
41 - 60 / 87
[ Back to top ]