
Fターム[5H004GA04]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 定常特性改善 (87)
Fターム[5H004GA04]に分類される特許
61 - 80 / 87
PID制御装置及びPID制御方法
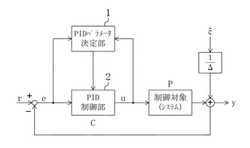
【課題】PID制御対象を制御するためのPIDパラメータを決定して、該PIDパラメータを用いて、上記制御対象を制御する場合に、予測モデルを構築しないで最適なPIDパラメータを容易に決定できるようにして、制御の信頼性を向上させる。
【解決手段】時刻tの時点での制御対象への入力、該制御対象からの出力及び目標値をそれぞれu(t)、y(t)及びr(t)とし、上記入力の差分に対する重み係数をλとし、むだ時間をkとし、差分演算子をΔとしたとき、
φ(t+k)=y(t+k)−r(t)+λΔu(t)
で表される一般化出力φ(t+k)が小さくなるように、上記PIDパラメータを決定する。
(もっと読む)
流体の温度制御装置及び方法

【課題】流体の温度制御装置において、制御の自由度を損なわずに、温度センサの個数を抑制する。
【解決手段】 推定器6が、出口温度センサが備えられていない加温槽15aの出口における流体の出口温度を推定する。制御部5は、出口温度センサ16が設けられている加温槽15bに対しては、測定された出口温度と目標温度とに基づいて操作量を決定し、出口温度センサが設けられていない加温槽15aに対しては、推定器6で推定された推定温度と目標温度とに基づいて操作量を決定する。
(もっと読む)
冷凍装置の制御方法及び制御装置
【課題】冷凍装置の制御対象機器の制御において、PI制御の不感帯内に入った場合においても、簡単かつ高精度な制御を実現する。
【解決手段】冷凍装置の運転制御を行う際に必要な所定の運転状態量とこの制御目標値との偏差を演算し、この偏差に基づいて、運転状態量を制御目標値に近づけるために制御される制御対象機器の動作量をPI演算により演算し、PI演算により演算された動作量が制御対象機器を動作させるために必要な必要動作量に達しない場合には、制御対象機器の動作を実行せずに、必要動作量に達しない動作量を蓄積し、蓄積した動作量が所定量に達した場合には、PI演算により演算された動作量が必要動作量に達していなくても、制御対象機器の動作を実行する。
(もっと読む)
製紙機械におけるキャリパ・プロファイル不良回復装置及び方法
製紙機械におけるキャリパ・プロファイル不良回復装置及び方法は、プロセス制御システム(100)において、1つ以上のアクチュエータ(114〜136)について1つ以上の設定点変更を決定するステップを含む。1つ以上の設定点変更を決定するステップは、第1動作モードで動作しているときは設定点変更を増大させるか又はその頻度を高めるステップと、第2モードで動作しているときには設定点変更を減少させるか又はその頻度を低めるステップとを含む。また、1つ以上の設定点変更を前記1つ以上のアクチュエータ(114〜126)に出力するステップも含む。更に、平半紙(108)が破断し、製紙機械(102)に掛け直した後に、第1モードに入るステップも含むことができる。また、(i)第1モードに入って以来指定の時間量が経過した後、又は(ii)第1モードに入り、平半紙(108)のキャリパ・プロファイルが、所望のキャリパ・プロファイルの指定閾値以内となった後に、第2モードに入るステップを含むことができる。 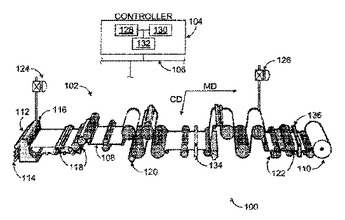 (もっと読む)
(もっと読む)
温度制御方法、温度制御装置およびループコントローラ
【課題】制御点数が増えた場合にも、高精度な傾斜温度制御を可能とする。
【解決手段】傾斜温度制御を行なう温度制御ブロック24H,24L−1,24L−2を階層化し、下層の温度制御ブロック24L−1,24L−2の入力温度モード変換ブロックからの平均温度GPV1を、上層の温度制御ブロック24Hの入力温度モード変換ブロック20Hの入力温度とする一方、上層の温度制御ブロック24Hの前置補償ブロック23Hからの制御出力を、下層の温度制御ブロック24L−1,24L−2の目標温度モード変換ブロック21L−1,21L−2の目標温度とし、これによって、下層の各温度制御ブロック24L−1,24L−2毎に、個別に傾斜温度制御するのではなく、両温度制御ブロック24L−1,24L−2全体として傾斜温度制御するようにしている。
(もっと読む)
燃焼装置を有する制御対象物の制御装置、及びボイラを有するプラントの制御装置
【課題】燃料性状の変化時にガス成分の制御性能が低下する事を抑制する制御装置を提供する事が目的である。
【解決手段】燃焼装置を有する制御対象物の計測データを入力し制御対象物への操作指令値を演算する基本制御指令演算手段と、燃焼装置へ供給する燃料の複数の燃料組成に対して、燃焼装置の操作パラメータとガス中成分のデータセットを格納する燃料データ格納手段と、制御対象物の過去の運転実績値を格納する運転実績データベースと、制御対象物の過去の運転実績値とデータセットのデータ間距離を算出し、データ間距離が最短となるデータセットを決定するデータ作成手段と、データ作成手段により決定されたデータセットを用いて、操作パラメータと燃焼装置の燃焼ガス中成分との関係をモデル化するモデル化手段と、基本制御指令演算手段の操作指令値をモデルを用いて現在のガス中成分より良い条件となる操作パラメータで補正する補正手段を有する制御装置。
(もっと読む)
廃棄物燃焼プロセスの制御
【課題】湿分が変動する廃棄物を処理する廃棄物焼却プラントの、自動化されたリアルタイム制御を可能にする。
【解決手段】廃棄物燃焼プロセスを制御するための方法及びシステムにおいて、入ってくる廃棄物水分などの、廃棄物燃焼プロセスの経時変化するプロセス・パラメータが、カルマン・フィルタに基づく、経時変化するパラメータのためのパラメータ評価アルゴリズムを介して、評価する。その評価されたプロセス・パラメータは、次に、廃棄物焼却プラントのリアルタイム制御のためのコントローラの中で、廃棄物燃焼プロセスのモデルの入力変数に対応する廃棄物供給速度などの、制御パラメータを決定するために使用する。
(もっと読む)
位置決め制御システム及びフィルタ
【課題】外乱オブザーバを用いることにより制御精度を向上させるとともに、ワインドアップ現象を防止する。
【解決手段】位置決め制御システム10は、制御対象Pのシリンダ12の進退量Yから外乱Dを推定してフィードバックを行う外乱オブザーバ46と、該外乱オブザーバ46によるフィードバックループ内に設けられた飽和要素48及び低域通過要素Qと、飽和要素48の飽和値Lを偏差εに基づいて変化させる飽和値変更部50とを有する。飽和要素48は正帰還のマイナーループ70内の前向き通路に設けられている。低域通過要素Qは正帰還のマイナーループ70内のフィードバック通路に設けられている。
(もっと読む)
フィルタ装置、及びそれを用いたフィードバック制御装置
【課題】入力信号のうちノイズ等の無用な高周波成分を低減させながら、制御すべき周波数帯域の位相遅れが小さいフィルタ装置、及びそれを用いたフィードバック制御装置を提供することを目的とする。
【解決手段】入力信号の高周波ノイズを低減するフィルタ装置であって、入力信号を位相遅れ処理して位相遅れ信号を出力する一次遅れフィルタ部と、前記入力信号を微分処理して微分信号を出力する微分特性処理部と、前記位相遅れ信号と前記微分信号を加算して出力信号を得る加算処理部とを備えることを特徴とするフィルタ装置、及びそれを用いたフィードバック制御装置。
(もっと読む)
トンネル換気制御方法および装置
【課題】トンネル換気制御において、煤煙濃度やCO濃度の予測値が、測定不能な自然
風や車の汚染物質排出量の影響で不正確になり、適切な運転が難しい。
【解決手段】直近の予測結果と対応した実績値のみに着目して予測誤差の時系列を生成し、
これに従って予測演算部の予測結果を補正する。また予測誤差時系列の自己相関を算出し、この自己相関を評価し予測誤差算出部の出力に乗じるゲインを決定する。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
モデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システム
【課題】 高炉を用いた銑鉄の生産等の断続的に原料を投入して生産物を取り出す生産プロセスについて、生産プロセスの状態を予測するためのモデル式を簡便に生成することができるモデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システムを提供する。
【解決手段】 状態予測装置1は、生産プロセスでの各種の生産条件を示す条件データ及び生産プロセスの状態を示す状態データを蓄積しておき、ある時点で得られた状態データとその時点以前の所定期間内で得られた複数種類の条件データとの対応関係を解析して、条件データから状態データを予測するモデル式を生成する。状態予測装置1は、生成したモデル式を用いて未来の状態データを予測できる。生産条件が変動した場合でも、モデル式に基づいて他の生産条件を適宜制御することにより、生産プロセスの状態を良好に調整することができる。
(もっと読む)
位置決め制御装置の制御パラメータ調整方法
【課題】推定誤差や計算誤差を含まない精度の高い最適制御パラメータを決定することができる位置決め制御装置の制御パラメータ調整方法を提供すること。
【解決手段】制御対象(3)を目標位置に位置決めする位置決め制御装置の制御パラメータを調整する方法であって、制御パラメータを所定の刻み幅で変化させ、その変化の度に位置決め制御装置の応答性を表す評価値を算出するステップと、各評価値に基づいて最適制御パラメータを決定するステップと、最適制御パラメータを位置決め制御装置に設定するステップと、含む。
(もっと読む)
デジタル速度制御装置、デジタルモータ制御装置、紙搬送装置、デジタル速度制御方法、その方法をコンピュータに実行させるプログラム、コンピュータ読み取り可能な記録媒体、および画像形成装置
【課題】正確な制御が可能なデジタル速度制御装置を提供する。
【解決手段】デジタル速度制御装置10は、搬送ベルト301の変位量を標本化周期に対応する最小単位の変位量の整数倍によって取得する移動距離検出装置500と、標本化時刻に基づいて搬送ベルト301の目標速度を算出する目標速度算出部101と、搬送ベルト301の現在速度を変位量および標本化時刻の差分で算出する現在速度算出部102と、目標速度が所定値よりも小さいか否かを判定する目標速度判定部105と、目標速度は所定値よりも小さく、かつ、現在速度は標本化周期あたり最小単位の変位量であると算出された場合、現在速度を設定値に置き換える速度補正部106と、置き換えた設定値と目標速度との誤差を算出する速度誤差算出部103と、速度誤差に基づいて駆動モータ200を制御する調節計部104と、を備える。
(もっと読む)
プロセス制御装置における非干渉制御方法、およびプロセス制御装置
【課題】 自動制御を行う3系列以上の制御ループに容易に適用することができ、かつ各制御ループの相互干渉を十分に抑えることが可能な非干渉制御方法を提供する。
【解決手段】 少なくとも3入力3出力以上の入出力変数を有するプロセス2と、このプロセス2と共に3系列以上の制御ループを構成する制御系3を有する。この制御系3は、3系列以上の制御ループの間に各制御ループ間の相互干渉を打ち消す非干渉要素29を備える。この非干渉要素29は、各制御ループの伝達関数および他の制御ループから干渉してくる干渉要素の伝達関数をむだ時間を含んだ一次遅れ系の応答形に近似して算出したものとする。
(もっと読む)
サーボ制御装置
【課題】 積分演算を含むサーボ制御を行う際に、外乱による影響を抑える。
【解決手段】 制御対象の状態を表す物理量に対して積分演算を行う際に、正積分演算及び負積分演算の2回の積分演算を施す。これで、制御の状況に応じて差別化された情報が得られる。そして、制御対象の状態が目標制御値になるように制御する際に、実制御値及び目標制御値に基づいて、正積分演算または負積分演算のどちらから得られた積分値を用いるかを選択する。これにより、位相遅延を含めていると判断された制御パラメータが除去される。したがって、全体の制御における位相遅延が抑えられることになり、例えば適切な操舵支援制御を行うことができる。
(もっと読む)
目標温度加工装置およびその階層構造
【課題】汎用の温度調節器であっても、傾斜温度制御を実現できるようにする。
【解決手段】 制御対象1の検出温度を、モード変換器6で傾斜温度および平均温度に変換し、入力される目標傾斜温度および目標平均温度になるように、PID制御部8−1,8−2で操作信号を出力し、この操作信号を、前置補償器9、リミッタ10−1,10−2および補償部11−1,11−2を介して温度調節器2−1,2−2の目標温度として与え、傾斜温度制御を行なっている。
(もっと読む)
制御装置
【課題】 制御対象が位相遅れやむだ時間などが比較的大きい動特性を示す場合でも、制御対象の入出力間での制御タイミングのずれを解消することができ、それにより、制御の安定性および制御性を向上させることができる制御装置を提供する。
【解決手段】 制御装置1は、制御対象の出力状態の予測値PREVO2を算出する予測値算出手段(ECU2、状態予測器22)と、Δ変調アルゴリズム、ΔΣ変調アルゴリズムおよびΣΔ変調アルゴリズムのうちのいずれか1つの変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、制御対象の出力Voutを制御するための、制御対象への制御入力(目標空燃比KCMD)を算出する制御入力算出手段(ECU2、DSMコントローラ24)と、を備える。
(もっと読む)
制御装置
【課題】状態量差が小さくなるように制御する際に、操作量の飽和を緩和し、本来の目的である状態量差を小さくするという効果が損なわれることを回避する。
【解決手段】制御装置は、各制御ループの状態量計測値を状態量変換行列により各状態量計測値を線形結合した値に変換する状態量計測値変換部5と、変換された状態量計測値とこれに対応する状態量設定値との制御偏差に基づき各制御ループの操作量を算出するPID制御演算部6−1〜6−3と、算出されたn個の操作量を操作量変換行列により各制御ループに配分されるように変換する操作量変換部7と、状態量設定値に対して急変動を抑制するフィルタリング処理を施す状態量フィルタリング設定値算出部3−1〜3−3とを備える。
(もっと読む)
プラントにおけるプロセスを制御するための方法とシステム
設定値に対してプロセスのパラメータを制御するために使用される比例−積分−微分(PID)用に制御因子を設定することによってプロセスを制御する方法とシステムが開示された。プロセスのパラメータに関するフィードバック信号をプロセスのセンサおよび第1のフィードバック・ループが受け取る。PIDコントローラの制御因子は、フィードバック信号に基づいて自動的に調整される。  (もっと読む)
(もっと読む)
61 - 80 / 87
[ Back to top ]