
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
221 - 235 / 235
回転軸の制御装置
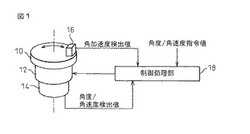
【課題】 回転体と検出器との間に剛性の低い部分が存在することによる振動を抑制または防止する。
【解決手段】 回転体10の回転角加速度を検出する角加速度センサ16を設け、角度/角速度指令値を角加速度の値に従って補正(18)する。
(もっと読む)
サーボ制御装置および方法

【課題】 時間や温度ともに変化する摩擦力をより正確に求め、時間や温度の変化に依存することなく常に位置制御や柔軟制御の制御性能を高く維持することができるようにする。
【解決手段】 実制御と同一構成のシミュレーション位置制御器15およびシミュレーション速度制御器16と、制御対象を模擬したメカモデル演算部18と、実制御とシミュレーションを比較する比較部19と、比較部19の出力から摩擦モデルを生成する摩擦モデル生成部20と、摩擦モデル生成部20の出力に基づいた摩擦補償値を補償する補償部21とを備える。
(もっと読む)
仮想パワーモニタを備えることにより制御対象の安定性を評価解析する機能を備えた制御システム
本発明は、未知の動特性や外乱のあらゆる影響を含むユーザー制御システムからの出力の安定性を評価し、かつ未知の動特性や外乱に拘らずユーザー制御システムからの出力の安定性を保証し得るシステム構成に関する。
すなわち、本発明の、仮想パワーモニタを備えることにより制御対象の安定性を評価解析する機能を備えた制御システムは、ユーザー制御則5によってユーザー制御対象3が制御されるユーザー制御システム2’に於て、ユーザー制御対象3からの帰還信号を受けてユーザー制御対象3に操作量を入力し得る保守的な制御則104と、保守的な制御則104からユーザー制御対象3へ仮想的に伝達されるパワーを観測する仮想パワーモニタ110とを備え、ユーザー制御システム2’からの出力の安定性を評価できる様にしたものである。  (もっと読む)
(もっと読む)
モータ制御装置
【課題】
粘性摩擦を同定でき、その同定結果を使用して摩擦補償を行い、精度よくイナーシャを同定することができるモータ制御装置を提供する。
【解決手段】
速度指令Vrefとモデル速度Vfb’のモデル速度偏差を制御処理してモデルトルク指令を生成するモデル速度制御手段(5)と、モータ速度Vfbに係数Dを乗算して補償トルク指令を生成する補償トルク生成部(18)と、第1トルク指令と補償トルク指令を加算し第2トルク指令を生成するトルク補償手段(17)と、イナーシャを算出するイナーシャ算出手段(19)とを備え、イナーシャ算出手段(19)は、第1モータトルク指令を時間積分してモータトルク指令積分値ITrefとモデル速度制御手段が生成するモデルトルク指令を時間積分したモデルトルク指令積分値ITref’との比からイナーシャJを算出するようにした。
(もっと読む)
閉ループ制御システムにおける周波数制御
プロセス制御装置、方法およびシステムは、閉ループ制御システムのフィードバック信号内で周期的外乱の影響を考慮する周波数制御を提供する。各々の大きさおよび位相を含むフィードバック信号の周波数成分を判定する。各周波数成分のほぼ逆位相およびほぼ同じ大きさを有する各周波数成分に対する波形を生成する。次に、波形を合計して、制御下システムに供給される制御システム出力から周期的外乱の影響を相殺するように制御システムの出力内で合計される補償波形を生成する。  (もっと読む)
(もっと読む)
歩行パターン作成装置、2足歩行ロボット装置、歩行パターン作成方法、2足歩行ロボット装置の制御方法、プログラムおよび記録媒体
【課題】パラレルリンク機構の2足歩行ロボット装置に安定した2足歩行を行わせることができる歩行パターンを作成する歩行パターン作成装置を提供することを目的とする。
【解決手段】足部(足底部)を備えた脚部と腰部とから成る2足歩行ロボット装置の歩行パターンを作成する歩行パターン作成装置であって、足部において目標ゼロモーメントポイントを設定し、設定した目標ゼロモーメントポイントに応じて腰部のモーメント補償軌道を算出し、絶対座標系における腰座標系の原点と絶対座標系における足座標系の原点とから腰座標系から見た足部の位置を算出し、絶対座標系から見た足座標系の姿勢を表わす回転行列と絶対座標系から見た腰座標系の姿勢を表わす回転行列とから腰座標系から見た足座標系原点の姿勢を表わす回転行列を算出して足座標系原点の姿勢を表わす回転行列により足部の姿勢を算出する。
(もっと読む)
産業用機器制御方法および産業用機器
【課題】ゲイン特性を低下させることのみに依存せず共振ピークが複数ある場合でも速度制御系を安定させた産業用機器制御方法と産業用機器を提供する。
【解決手段】本発明による産業用機器制御方法は、制御対象120を駆動させる駆動部210と、制御対象120または駆動部210の位置情報を検出する検出部220と、制御対象120または駆動部210の動作速度を規定した速度指令を出力する速度指令発生部230と、検出部220から位置情報を入力し速度指令発生部から速度指令を入力し、位置情報および速度指令に基づいて駆動部210を制御する制御処理部240とを備えた産業用機器において、制御対象120の固有振動数に起因する共振周波数における制御処理部240の入出力の位相特性を産業用機器毎に設定することによって該産業用機器を安定化する。産業用機器は本産業用機器制御方法によって調節されている。
(もっと読む)
モデル予測制御方法
【課題】 モデル予測制御において、最適化演算の処理時間を短縮し、かつ演算精度の低下を抑える。
【解決手段】 制御対象の動的モデルを用いて操作量の各変数について数値微分を行って微分値を求め、微分値を要素とするヤコビアン行列に基づいて評価点を移動させ、移動した評価点ごとに評価を行なって最適操作量を決定するモデル予測制御方法において、微分値を所定値と比較して(S13)微分値が所定値より小さい場合、評価省略フラグをオンにする(S14)。次回のヤコビアン行列作成プロセスでは微分値を0として、数値微分を省略できる。この場合、微分値を0とする数値微分ステップが終了すると評価省略フラグをオフにして(S18)、その次の数値微分ステップでは数値微分を行なうようにすると、演算精度が向上する。
(もっと読む)
位置決め制御装置及び位置決め制御方法
【課題】位置決め機構内の弾性変形を考慮してより正確に位置決めが可能であるとともに、より短時間に位置決め制御が可能な位置決め制御装置及び位置決め制御方法を提供する。
【解決手段】入力された位置指令信号と現在位置信号とに基づいた速度指令信号を速度制御部に出力する位置制御部と、入力された速度指令信号に基づいたトルク指令信号を電流制御部に出力する速度制御部と、入力されたトルク指令信号と外乱トルク信号とに基づいた制御電流を出力してモータを駆動する電流制御部と、モータの回転数に関する物理量を検出してモータの現在位置信号を出力する検出部と、制御電流とモータの回転数に関する物理量とが入力されて外乱トルク信号を出力する外乱トルク推定部とを備え、外乱トルク信号が入力されて位置補正信号を出力する位置補正部を備え、位置決め制御の開始位置から目標位置に到達するまで位置補正信号を位置制御部の入力に追加する。
(もっと読む)
サーボ制御装置
【課題】 目標指令とモータ出力との偏差を最小とする最適なフィードフォワードゲインを自動で設定できるようにする。
【解決手段】 目標指令とモータ2の出力との偏差絶対値の最大値を最小とするようなフィードフォワード制御器におけるフィードフォワードゲインを自動で設定できるフィードフォワードゲイン変更手段5を備える。フィードバック制御器4は目標指令とモータ2の出力とを一致させるような制御入力をモータ制御器3に与え、フィードバック制御器6は、目標指令を入力として加減速度一定時、及び速度一定時の偏差が零となるような複数の補償信号にフィードフォワードゲイン変更手段5において設定されたフィードフォワードゲインを乗じた複数のフィードフォワード信号をモータ制御器3に与え、モータ制御器3はモータ2を制御する。
(もっと読む)
機械定数同定装置および同定方法
【課題】
速度に依存する粘性摩擦と速度の方向に依存するクーロン摩擦に分離して、粘性摩擦係数、クーロン摩擦係数、および、一定外乱トルクをリアルタイムで同定を行うことができるようにする。
【解決手段】
速度指令Vrefを出力する指令発生部11と、モータ速度を制御する速度制御部12と、摩擦を全て速度に比例した粘性摩擦として粘性摩擦係数D’から算出する全摩擦算出部13と、クーロン摩擦同定部14と、粘性摩擦同定部15と、同定したクーロン摩擦と粘性摩擦と一定外乱を表示する摩擦表示部16を備える。
(もっと読む)
適応型空間ノッチフィルタ
生産システム内で回転要素の角速度の変化に従って適応する空間ノッチフィルタを記述する。生産システムにおいて、構成要素やセンサーの欠陥等、システム内に空間的に分布する物理特性に起因してフィードバック信号にノイズが現れる場合がある。このノイズは、システムの回転要素の角速度が変化するにつれて変化する周波数帯域に集中する場合がある。本発明は、1個以上のノッチフィルタを用いてノイズをフィルタリングして、ノッチフィルタの中心周波数を角速度の関数として適応させる技術を提供する。ノイズ周波数が変化した場合に、ノッチフィルタの中心周波数がノイズを追跡する。  (もっと読む)
(もっと読む)
サーボ機構制御系のための適応コマンドフィルタリング
本発明の好適な実施例は、コマンドトラジェクトリの間および/またはその後のサーボ誤差を減少させるために、コマンドトラジェクトリ、サーボ機構制御系(10)のアーキテクチャまたはその両方を修正するための方法を実施する。反復微調整手順は、サーボ機構制御系で使用するために補正入力duを生成し、この補正入力は、サーボ機構制御系出力の要求された値(yd)と、その現実値(y)との間の誤差(e)を著しく減少する。一実施例では、独特に識別されたプラントモデルは、微調整手順の性能および信頼性を改善する近似傾斜を計算するために、反復微調整手順で使用される。他の実施例では、実際のプラント応答が反復微調整手順の特定モデルに代えて使用される。これは、補正入力信号duを更新するために、それをプラント(12)に適用する前に、トレーニング運転から蓄えられた誤差信号を時間反転することによって成し遂げられる。 (もっと読む)
電動機駆動システム用のセンサレス制御方法および装置
拡張カルマンフィルタ(330)を使用して初期回転子位置を予測し、その後回転子位置および/または速度を様々なタイプの負荷条件下で正確に予測する方法および装置が、電動機(106)のための状態オブザーバ制御システム(600)を提供する。初期回転子位置の様々な設定から、推定回転子位置/速度を出力としてもたらすことができる、制御システムモデル(300)が生成される。制御システムモデル(300)は、EKF(拡張カルマンフィルタ)推定器(330)と、速度コントローラ(322)と、電流コントローラ(324)と、可変負荷構成要素(310)とを含む。動作中、EKF推定器(330)は、速度および電流コントローラ(322、324)とフレーム変換(326、328)からの入力によって生成された基準電圧(402、404)および基準電流(1325)に基づいて、回転子速度(327)および位置(333)を推定する。さらに、基準電圧および基準電流(402、404、1325)は、システム(600)内のフィードバック信号(418、346)として、かつ電動機負荷(602)に印加する電力を制御するための駆動信号として使用されるように、フレーム変換される。  (もっと読む)
(もっと読む)
サーボモータの制御装置
【課題】速度追従から力追従への自動切換を安定して行うサーボモータの制御装置を簡便に実現する。
【解決手段】電動モータ1と、その駆動電流を帰還制御する電流制御手段12と、この電流制御手段12を介して電動モータ1の速度を速度指令Vcに追従させる速度制御手段11と、電動モータ1にて駆動される作動部2に生じた力Ffを検出する力検出部4と、電流制御手段12を介して電動モータ1の出力を力指令Fcに追従させる力制御手段24とを具えたサーボモータの制御装置において、力指令Fcと力検出部4の出力Ffとの差ΔFを演算する第1差演算手段24aと、速度指令Vcと電動モータ1の速度Vfの差ΔVを演算する第2差演算手段11aと、それらの差ΔF,ΔVを比較してその大小に応じて選択的に速度制御手段11と力制御手段24との何れか一方を電流制御手段12に結合させる選択切換手段22+23とを備える。
(もっと読む)
221 - 235 / 235
[ Back to top ]