
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
21 - 40 / 235
共振抑制装置及び共振抑制方法
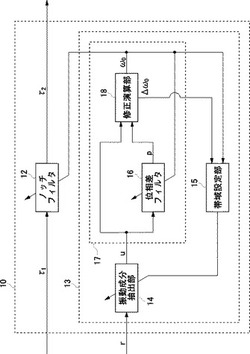
【課題】ノッチフィルタの中心周波数を良好に調整する。
【解決手段】共振抑制装置は、制御系の共振を抑制するために当該制御系に設けられているノッチフィルタ12と、ノッチフィルタ12の中心周波数を更新する中心周波数演算部17と、中心周波数演算部17への入力信号の帯域を制限するための振動成分抽出部14であって、その通過帯域が中心周波数に連動して設定される第1のフィルタを含む振動成分抽出部14と、を備える。通過帯域は中心周波数の修正量が基準を下回る場合に中心周波数に連動して設定されてもよい。
(もっと読む)
フィードバック制御回路、フィードバック制御システム

【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
発電プラントおよび発電プラント制御装置
【課題】蒸気タービン回転数の変動に基づいてガバナ弁を制御する制御機能の試験を的確に安全に行なう。
【解決手段】発電プラント制御装置は、ガバナ弁位置指令信号14を出力するボイラ・タービン協調制御部40と、調整信号21とガバナ弁位置指令信号14とを加算してガバナ弁指令信号22を出力するガバナ制御部41と、を有する。ガバナ制御部41は、定格周波数と蒸気タービンの回転数の実測データとを比較して偏差信号18を出力する減算器17と、偏差信号18に模擬試験信号を加算して調整基礎信号43を出力する試験信号加算部42と、調整基礎信号43に比例処理を行なって調整信号21を出力する比例器20と、調整信号21にガバナ弁位置指令信号14を加算してガバナ弁指令信号22を出力する協調制御加算器23と、を具備する。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
制御スケジューリング・システム及び方法
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
PID制御器のモード切替装置
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
電気エネルギーを生成する風力発電機を制御する方法
圧力制御装置及び圧力制御方法
【課題】サーボモータにより動力伝達手段を介して作動体を動作させて受圧体に与える力を、ロードセル等を使わずに正確に制御し、機械の構成を簡単にし、信頼性を得る。
【解決手段】サーボモータ11により射出圧力を制御する電動射出成形機1の制御装置15は、電動射出成形機1の制御モデルに対して構築され射出スクリュー5が発生する力を推定するオブザーバ19と、サーボモータ11に対する電流指令値Iとパルスエンコーダ14の回転位置θとによりオブザーバ19が推定した力を入力して射出スクリュー5に作用させる力をフィードバック制御する射出圧力フィードバック制御部20とを備え、オブザーバ19は、電流指令として重畳させた振動に応じて生じる抗力が、機械インピーダンス要素を介して被駆動部に作用する力を外乱として同定した制御モデルに基づいて構成される外乱オブザーバ部を備え、被駆動部に作用する力を推定する。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
モータ制御装置
【課題】 モデル制御系のパラメータを簡単に調整でき、しかも、モデル速度制御器から出力されるトルク指令が過大になることがなく、より高速で振動のない位置決めを実現できるモータ制御装置を提供する。
【解決手段】 モデル制御系1は、モータについての第1の慣性系の機械モデルと、負荷についての第2の慣性系の機械モデルと、モータと負荷との間のねじりトルクについてのねじりトルクモデルと、フィードバック加速度指令S10をモデルトルク指令部8にフィードバックする第1の状態フィードバック系と、フィードバック速度指令S5をモデル速度指令部5に状態フィードバックする第2の状態フィードバック系とを備えている。モデル制御系の状態方程式から得られる特性方程式が4重根を持つように演算して得たパラメータの関係式に基づいて、モデル制御系のパラメータが定められている。
(もっと読む)
制御装置、移動体、制御方法、及びプログラム
【課題】複数のフィードバック補償器を有し、これらを順次切り換える制御系において、切り換え時の過渡応答の特性を向上させるようにする。
【解決手段】切換以降の過渡応答、制御入力の振幅、制御入力の差分値、及び切換直前と直後の制御入力の差分値を抑制する評価関数を設計し、この評価関数を最小化する倒立2輪走行用フィードバック補償器60の状態ベクトルの初期値を与える。これによって、制御切換後の過渡応答や、制御入力の振幅、不連続性を向上させることができる。
(もっと読む)
能動適応ジャイロスタビライザー制御システム
歳差情報だけに基づいて海洋船舶の運動を安定化するためのジャイロスタビライザー制御システム及び方法。制御システムは自動利得制御(AGC)歳差コントローラ(60)を用いる。システムはジャイロフライホイール(12)に可能な限り大きな歳差−歳差が大きくなるほど、ロール安定化モーメントが大きくなる−を発現させるように、常に漸進的に最小化される利得因子を用いて動作する。この連続利得変化により、海況及び航行状態の変化への適応が与えられる。システムは最大歳差に到達する確度を有効に予測する。このイベントが検出されると、制動歳差トルクを与えるため、利得が急速に高められる。イベントが過ぎてしまうと、システムは再び利得を漸進的に低下させようとする。 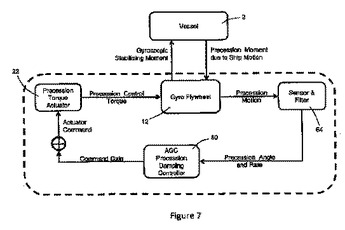 (もっと読む)
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
電動機制御装置
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
印刷装置およびゲイン補正方法
【課題】特定の制御対象について、速度変動を抑えた安定した動作を実現することが困難であった。
【解決手段】制御対象を駆動するモーターと、当該制御対象の速度を検出し、当該検出した速度と当該制御対象の目標速度との差に基づいて当該モーターの駆動をPID制御する制御部とを備える印刷装置であって、上記制御部は、上記モーターを駆動させることにより特定の制御対象を動作させた所定期間における当該特定の制御対象の速度変動量を取得し、上記PID制御のための所定の定数を、当該速度変動量に基づいて求めた補正比率に応じて補正するゲイン演算部を備える構成とした。
(もっと読む)
位置制御装置
【課題】 制御対象機械を目標位置へ移動させて停止させるための位置制御装置において、オーバーシュートの抑制とサイクルタイムの短縮を可能にする。
【解決手段】 フィードフォワード制御ブロック27aは位置指令ブロック21からの前記位置指令値に対して、フィードフォワード設定手段41で設定し出力されるフィードフォワードゲインを乗じた値を、新たな補正量として出力する機能を有し、この位置制御装置40が位置決め制御動作を開始すると、フィードフォワード設定手段41では、位置指令ブロック21からのパルス列形式の位置指令値に含まれるパルス周波数の変化に基づく速度指令演算値を求めつつその変化を監視し、この速度指令演算値が予め定めた切換設定値より小さいときにはフィードフォワード制御ブロック27aへのフィードフォワードゲインのより小さく設定することにより、位置決め終了時のオーバーシュートの抑制と位置決め開始から終了までのサイクルタイムの短縮とを可能にしている。
(もっと読む)
電動機の制御装置
【課題】簡単な調整によって負荷機械に応じた適切な制御パラメータを得ることができ、多種多様な負荷機械を高精度かつ安定に運転可能とした電動機の制御装置を提供する。
【解決手段】電動機16により駆動される負荷機械20の位置が位置指令に一致するように電動機16を制御する制御装置であって、位置制御部12、速度制御部13及び電流制御部16を有する制御装置において、実現したい応答の速さを示す応答性設定信号と負荷機械種別判別信号とに基づいて、位置制御部12、速度制御部13及び電流制御部16にて使用する制御パラメータを自動的に演算する制御パラメータ設定手段23を備え、この制御パラメータ設定手段23における制御パラメータの演算アルゴリズムを、前記負荷機械種別判別信号に応じて変更する。
(もっと読む)
制御パラメータ適合装置
【課題】適合データの信頼性を向上させることができる制御パラメータ適合装置を提供する。
【解決手段】電動パワーステアリングシステムの機械的な構成要素が持つ粘性摩擦及びクーロン摩擦等の動的特性の製品間のばらつきを加味して、ハンドルの自励振動等の特定の問題が最も発生しやすい条件を有してなる検証用モデルを備えた。そして当該検証用モデルに、適合された制御パラメータである適合データを与えて電動パワーステアリングシステムの動作をシミュレーションするとともに、当該シミュレーションの結果に基づき前記適合データの妥当性を検証する。これにより、量産時における製品間の動的特性のばらつきを考慮した制御パラメータの設定が可能となる。ひいては、適合データの信頼性が高められる。
(もっと読む)
自動操舵装置及び方法
【課題】無駄な舵取り量の発生を抑えて省エネルギーの効果を高めることができる自動操舵装置及び方法を提供する。
【解決手段】予め設定されたバッチ区間B1,B2毎に船体運動モデル及び制御ゲインを更新しつつ、バッチ区間よりも短い制御周期毎に針路偏差を解消し得る命令舵角を求めて航走体の針路を自動制御する自動操舵装置及び方法であって、バッチ区間B1からバッチ区間B2に切り替わる直前のバッチ終了期間T1内における針路偏差及び命令舵角を記憶し、バッチ区間B1からバッチ区間B2に切り替わったときに、船体運動モデル及び制御ゲインを更新するとともに、記憶した針路偏差及び命令舵角と更新した船体運動モデルとを用いて状態変数を更新し、更新した制御ゲインと更新した状態変数とを用いて新たなバッチ区間B2における命令舵角を求める。
(もっと読む)
21 - 40 / 235
[ Back to top ]