
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
121 - 140 / 235
シーク制御方法、シーク制御装置および媒体記憶装置
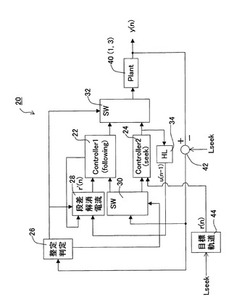
【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
フィードバック制御方法

【課題】制御精度を向上させたフィードバック制御方法を提供する。
【解決手段】PI制御11の制御出力信号(速度指令)に所定のパルス31を掛け合わせ、制御サイクルよりも短い間隔で制御出力をパルス化することにより、見かけの出力分解能を上げて、高い精度でのフィードバック制御ができるようにした。
(もっと読む)
剛性同定装置およびそれを備えたモータ制御装置
【課題】 非剛性パラメータが分からない場合にも、微小動作のみで負荷が低剛性に連結したモータの剛性を高精度に同定することができる剛性同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 剛性同定器107が、トルク指令とモータ位置との乗算値である位置トルク指令乗算値を算出する位置トルク指令乗算器108と、モータ位置の振幅であるモータ位置振幅を算出する位置振幅演算器109と、前記位置トルク指令乗算値と前記モータ位置振幅に基づいて剛性同定値を算出して出力する剛性演算器110と、を備える。
(もっと読む)
内部モデル制御装置および内部モデル制御方法
【課題】直列補償によるオープンループ制御を基本とし、モデル化誤差や外乱が発生した場合にのみフィードバック補償を行なうとともに、目標値に対しての行過ぎ量がほぼ皆無であって、しかも外乱に対するドロップ量が少く抑えられるようにした位置制御装置を提供する。
【解決手段】内部モデルフィルタ24によるオープン制御を行なうようにした内部モデル制御装置において、第2のノミナルモデル29と外乱オブザーバフィルタ30とから成る外乱オブザーバ28をさらに付加し、外乱が生じた場合には制御対象20と第2のノミナルモデル29との偏差をコンパレータ31の出力として取出し、外乱オブザーバフィルタ30によってフィードバックし、推定外乱として加算器33によって制御対象20の入力側に印加し、減算器34を介して加えられる外乱と相殺する。
(もっと読む)
非ホロノミック推進体の制御方法
【課題】非ホロノミック拘束を利用した水中推進体のアイデアはあったが、アクチュエータを減らしても制御が難しくなり性能も劣化するためアクチュエータ低減のメリットがそれに見合わない場合が多く、現在までにこのような推進体の実用化例はない。
本発明は、このような問題点を解決しようとするものである。
【解決手段】非ホロノミック拘束を利用した推進体の運動制御について、独自の工夫を加えて従来の非ホロノミック推進体の制御に代わる新しい最適制御則を導いた。1つのスクリューのみを有する円筒状の水中推進体に適用し、スクリューによる推力の大きさと±符号のみを制御することで3次元空間の任意の位置へ移動できるような制御則を見出した。これにより推進体のコストと信頼性を大幅に改善できる。
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
制御装置
【課題】ゲイン変更時に生じる速度変動を抑制することができ、リアルタイムにゲインの変更をしても、指令値に対する軌跡精度が低下することがない制御装置を提供する。
【解決手段】制御装置は、位置指令を生成する指令生成部2と、所定のタイミングでゲインを変更し、サーボ制御部2に出力するゲイン制御部3と、指令生成部2より出力される位置指令を補正し、補正位置指令を生成する位置指令補正部4と、補正位置指令と、ゲイン制御部3からの変更後のゲインに基づいてモータを駆動するサーボ制御部1とを備えている。
(もっと読む)
外乱補償判断装置、外乱補償判断方法、記録媒体及びディスクドライブ
【課題】外乱補償判断装置及び方法とそれを利用したディスクドライブを提供すること。
【解決手段】プラントを制御する制御入力信号と制御入力信号に相応するプラントのサーボ出力信号とを入力して、プラントに印加された外乱値を推定する外乱観測器1000と、外乱観測器1000で推定された外乱値の絶対値を一定周期内で累積しつつ、累積された推定外乱の値を初期設定された条件によって評価して外乱補償オン/オフモード転換を決定する外乱評価器270と、外乱補償オン/オフモード転換決定によって、外乱観測器1000で推定された外乱値のフィードバックオン/オフをプラントの制御ループにスイッチングするスイッチング手段280とを備えることを特徴とする外乱補償判断装置を提供する。
(もっと読む)
シミュレーションモデルの同定方法およびそのプログラム
【課題】複数のパラメータについての外乱を考慮したモデルを同定する。
【解決手段】パラメータ(外乱)の種類iを決定し(S1)、各パラメータ毎に、残差モデルを作成する(S2)。モデル出力と実機の出力との残差を計算し(S3)、その計算結果に基づいて、複数のパラメータの外乱の大きさを同定する(S4)。このとき、1つの残差についてパラメータの種類に応じた複数の外乱モデルの大きさを同定する。
(もっと読む)
サーボモータの制御装置
【課題】速度指令あるいは位置指令のプロファイルに左右されることが少なく、滑らかな追従性あるいは整定性を発揮するサーボモータを提供する。
【解決手段】速度指令は指令前置フィルタ106を通過した後、フィードバックループ104に入力される。フィードバックループ104は、サーボモータ101に接続されたエンコーダ103の出力信号に従って、サーボモータ101を速度指令あるいは位置指令に追従するように制御する。フィードバックループ104に内包される制御パラメータの値は、パラメータ設定手段105によって剛性設定に従って設定され、同時に指令前置フィルタ106の遮断周波数もパラメータ設定手段105によって剛性設定に従って設定される。
(もっと読む)
システムの最適制御方法
【課題】予見不可能な時変目標値に追従する有限評価区間の非線形最適制御問題の制御則を導くことが課題である.
【解決手段】Receding Horizon制御を用いた非線形最適制御問題の近似解法を開発し,非線形システムの実時間制御に適用できる一般的手法を導いた.
具体例としてRR車の旋回限界域におけるDYCの目標横すべり角追従制御に適用した結果、一般的な比例制御に比べ追従性(応答性と収束性とも)が大幅に向上できることを確認した.また旋回限界域においてもニュートラルステア特性を実現できることを明らかにした.
(もっと読む)
モータ制御装置
【課題】 慣性モーメントが変動しても安定で、制御性が高いモータ制御装置を提供する。
【解決手段】 位置偏差に比例ゲインを乗算し第1速度指令を生成する比例制御器(6)と、位置指令を微分し第2速度指令を生成する速度フィードフォワード制御器(8)と、速度偏差を比例・積分制御処理をし第1トルク指令を生成する比例積分器(15)と、位置偏差に比例ゲインを乗算し第2トルク指令を生成するトルクFF部(17)と、位置指令に比例ゲインを乗算し第3トルク指令を生成するトルクフィードフォワード制御器(21)と、モータ速度と速度偏差から粘性摩擦を同定する粘性摩擦同定器(20)と、第4トルク指令と粘性摩擦同定値から第5トルク指令を生成する加算器(24)と、第5トルク指令と速度偏差から慣性モーメント同定値を生成する慣性モーメント同定器(26)と、第5トルク指令と慣性モーメント同定値からトルク指令を生成する乗算器(27)とを備えた。
(もっと読む)
サーボモータ駆動制御装置
【課題】指令の形状に依存して位置偏差のサンプリング周期を可変にして、補正データを記憶するメモリ容量を減らす。
【解決手段】サーボモータ3に繰り返される周期的な位置指令を与えるCNC2から位置指令を受け、かつ位置検出器4から被駆動体の位置を示す信号を受け、位置指令と被駆動体の位置との第1位置偏差を取得する手段13と、CNC2から与えられた情報に応じて第1位置偏差をサンプルするサンプリング周期Bを可変可能に計算する手段14と、サンプリング周期Bに従って第1位置偏差をサンプルして得た第2位置偏差を取得する手段15と、第2位置偏差より第1補正データを求める補正データ算出手段20と、第1補正データを繰り返される周期的な位置指令の少なくとも1周期分記憶する記憶手段21とを備え、第1位置偏差と第1補正データに基づき被駆動体を位置制御する。
(もっと読む)
閉ループ制御のチューニングの自動化
本発明は閉ループシステムのためのフィルタとループ比例ゲインを同時選択するための新規な装置、方法およびシステムに関するものである。本発明の1つの典型的な実施形態によれば、速度ループ補償器として知られるコントローラの一部を自動的に選択する方法が提供される。この方法は速度制御(例えばモータエンコーダ角)のフィードバックに使用されるセンサへの作動力(例えばモータトルク)からのダイナミック応答を表す周波数応答関数(FRF)に作用する。この周波数応答関数はそれぞれ対応する周波数値をもつ複素数の列として表すことができる。このチューニング方法は、安定余裕に関して規定された一連の基準を満たしつつループ比例ゲイン(Kp)の最大化を可能にするフィルタパラメータの組み合わせを決定する。積分ゲインと参照モデルを選択する方法も提示される。 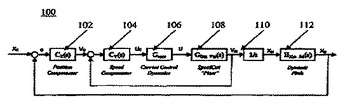 (もっと読む)
(もっと読む)
サーボ制御装置とその調整方法
【課題】 モータ制御装置単体でかつ、自動的に応答誤差調整を行なうことができるサーボ制御装置とその調整方法を提供する。
【解決手段】 位置制御器と、積分制御を有した速度制御器と、移動方向反転からの移動量を計測する移動量測定器(204)と、移動量が所定値に達するまで前記積分制御の積分ゲインを増加させる応答誤差補償器とを有するサーボ制御装置において、モデルに基づいて理想位置を演算する位置制御モデル部(201)と、モデル位置と実際位置との偏差から応答誤差を推定する応答誤差推定器(205)と、テストプログラムを実行した前記応答誤差を低減する積分ゲイン補正部(207)とを備えた。
(もっと読む)
システム同定装置およびそれを備えたモータ制御装置
【課題】 可動範囲の限定された負荷が低剛性に連結した制御対象の剛性を、機械的負担をかけず、静かに、雑音などの影響を抑制し高精度に同定することができるシステム同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 剛性同定器107が、トルク指令振幅とモータ位置振幅に基づいて、剛性同定値を算出して出力する剛性演算器116を備え、また、剛性同定器107が、トルク指令に基づいてトルク指令振幅を算出して出力するトルク指令振幅演算部108と、モータ位置に基づいてモータ位置振幅を算出して出力するモータ位置振幅演算部112と、を備える。
(もっと読む)
移動体の位置決め制御装置及びレーザ加工装置
【課題】温度変化に起因するセトリング応答におけるオーバーシュートの増大を抑制することによって、位置決め精度に優れる移動体の位置決め制御装置及びレーザ加工装置を提供すること。
【解決手段】角度指令データ8の絶対値sが予め定める角度範囲(H≧s≧h)である場合、離散的時刻が開始された後、電流指令が出力されると、ループゲイン修正器12により今回測定されたオーバーシュート量Ovと予め定めるオーバーシュート量の許容値NOvとの差に基づいて次回の位置決めに使用するループゲインαを定める補正量Mを演算し、その結果に基づいてループゲインαを修正する。この場合、オーバーシュートに引き続いて発生するアンダーシュートの大きさを考慮するようにすることができる。
(もっと読む)
ロボット制御装置
【課題】 コンベア等の搬送装置におけるロボットの作業対象物の移動量の変化が大きくても高速高精度な追従作業を実行可能なロボット制御装置を得る。
【解決手段】 ロボット制御装置において、搬送装置位置検出部と、搬送装置位置生成部と、搬送装置位置生成部で得られたロボットの指令値を生成する搬送装置移動量生成部と、ロボットの搬送装置に対する追従誤差を記憶しておく追従誤差記憶部と、ロボットの追従遅れを補正する追従遅れ補正量を求め、追従遅れ補正量と追従誤差記憶部に記憶された追従誤差より追従目標移動量を生成する追従遅れ補正部と、追従遅れ補正部で生成された追従目標移動量から次制御周期の追従移動量を生成する追従移動量生成部とを備えるようにした。
(もっと読む)
システム同定装置およびそれを備えたモータ制御装置
【課題】 可動範囲が限定された負荷の連結したモータの慣性モーメント、粘性摩擦、クーロン摩擦を、微少範囲で高精度に同定することができるシステム同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 システム定数同定器が、位置フーリエ係数とトルク指令フーリエ係数に基づいてシステム定数同定値を算出して出力するシステム定数演算器103を備え、また、前記システム定数同定器が、モータ位置に基づいて前記位置フーリエ係数を算出して出力する位置フーリエ変換器101と、トルク指令に基づいて前記トルク指令フーリエ係数を算出して出力するトルク指令フーリエ変換器102と、を備える。
(もっと読む)
適応ノッチフィルタとそれを用いた制御装置
【課題】 幅や深さを自動的に調整し、振動している周波数が複数あっても抑制したい周波数に確実に適用でき、手動調整とも容易に併用できるノッチフィルタとそれを用いた制御装置を提供する。
【解決手段】 ノッチフィルタ周波数設定値を決定するノッチフィルタ周波数決定部(11)と、ノッチフィルタの入力および出力とノッチフィルタ周波数設定値から適応入力を算出する適応入力演算部(14)と、ノッチフィルタの入力とノッチフィルタ周波数設定値と基準信号から適応基準を算出する適応基準演算部(15)とを備え、ノッチフィルタはノッチフィルタ周波数をノッチフィルタ周波数設定値で固定とし、幅または深さまたはそれら両方が可変となっており、フィルタ係数設定部(13)は、適応入力と適応基準とを用いてノッチフィルタの幅または深さまたはそれら両方を逐次演算により決定するようにした。
(もっと読む)
121 - 140 / 235
[ Back to top ]