
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
41 - 60 / 235
サーボの軌跡追従の位置決め調整方法及びその制御装置

【課題】 速度制御や位置制御調整後、円弧半径縮小量、最大速度と位置制御ゲインより最大速度フィードフォワードゲインを設定し、最大速度でオーバシュートしない範囲で速度フィードフォワードゲインを調整することができる、サーボ制御装置の軌跡追従の位置決め調整方法を、提供する。
【解決手段】 円弧半径縮小量と最大送り速度に基づいて位置追従遅れ量を算出する追従遅れ算出部と、前記位置追従遅れ量に基づいて最大フィードフォワードゲインを算出する最大フィードフォワードゲイン設定部と、前記追従遅れ量と最大フィードフォワードゲインに基づいて最大移動速度でフィードフォワードゲインを調整するフィードフォワードゲイン調整部と、を備えた。
(もっと読む)
機械装置の制御装置及び機械装置の特性同定方法

【課題】 モータに動力伝達部を介して被駆動部を機械的に結合したものを制御対象とするような機械装置への適用に適し、機械装置における摩擦や装置の自重のような外乱が存在しても精度良く装置特性を同定して駆動制御を実行することのできる制御装置を提供する。
【解決手段】 制御装置は、トルク指令値τMを受けるモータ10と被駆動部11との間を動力伝達部12で連結した慣性共振系を制御対象とし、該制御対象の状態量としてモータ軸角速度ωMを計測する計測手段と、前記モータ、動力伝達部、被駆動部に起因する外乱トルクを推定する外乱オブザーバ17と、推定された外乱トルクを前記トルク指令値から減算する減算部18と、前記減算部の出力及び前記モータ軸角速度ωMに基づいて前記制御対象のパラメータを同定する制御対象特性同定器15を含み、同定されたパラメータに基づいて前記トルク指令値を調整する。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 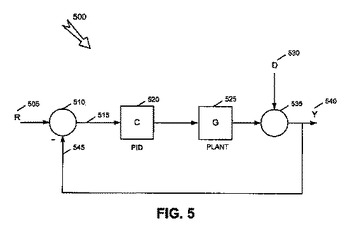 (もっと読む)
(もっと読む)
デュアル位置フィードバック制御を行うサーボ制御装置
【課題】デュアル位置フィードバック制御を行って加工目的に応じた位置偏差の低減を実現するサーボ制御装置を提供する。
【解決手段】サーボ制御装置が、モータの位置を検出する第1の位置検出部と、被駆動体の位置を検出する第2の位置検出部と、位置指令とモータ位置フィードバックとに基づいて第1の位置偏差を演算する第1の位置偏差演算部と、位置指令と被駆動体位置フィードバックとに基づいて第2の位置偏差を演算する第2の位置偏差演算部と、第1の位置偏差と第2の位置偏差との差分を、時定数回路を通して第1の位置偏差に加算することにより、位置制御に使用される第3の位置偏差を演算する第3の位置偏差演算部と、第2の位置偏差又は第3の位置偏差のいずれか一方を選択して出力する切替部と、該切替部からの出力を学習し、第3の位置偏差に対する補正量を出力する学習制御部と、を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】ドライバがハンドルを切る際にはその操作感を損なわないようにしつつ、ハンドル戻し時には急な戻り感を低減して車両の収斂性を向上させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】路面反力に対するモータ速度の特性は、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法でモータを駆動する場合に比べて、従来のダンピング制御ありの場合の特性とほぼ同様に、所定の周波数帯域においてモータ速度が抑制される。一方、ハンドルトルクに対するモータ速度の特性については、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法の特性からほとんど変化がない。このように異なる2つの特性(仕様)を共に満たす制御装置を構成することで、ドライバのハンドル操作を妨げることなく車両の収斂性を向上させることが可能となる。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
水車またはポンプ水車用調速制御装置
【課題】水車またはポンプ水車用調速制御装置において、発電機の負荷遮断後、ガイドベーン閉鎖特性の適正化と、軸系の回転速度および導入鉄管の水圧変動の安定性を確保する。
【解決手段】出力増減指令1による指令値と、軸回転速度19とガイドベーン9の開度の検出値との偏差を演算する制御入力演算器3の演算値を入力するPIDコントローラ4と、フィードフォワード制御要素22を設け、発電機18の負荷遮断信号を受信するフィードフォワード制御要素22によって、予め設定されたガイドベーン閉鎖特性の関数でトラッキング演算するようPIDコントローラのI(積分)演算要素6が制御され、その演算結果と、P(比例)5、D(微分)6演算要素の結果和でガイドベーン開度を制御する調速制御装置2。
(もっと読む)
シミュレーション装置及びシミュレーション方法
【課題】制御装置で実行されるタスクの実行周期がモデル演算周期よりも短い場合であっても、シミュレーションの精度を向上させ、適切な信号値を制御装置に出力できるシミュレーション装置を提供する。
【解決手段】制御対象を模擬して制御対象の状態値を算出するモデル演算を所定のモデル演算周期で繰返すモデル演算部2と、前記モデル演算部2で算出された状態値を信号値に変換して制御装置7に出力する信号出力部4を備えているシミュレーション装置1であって、前記モデル演算部2により状態値が更新されるまでの間、過去の状態値に基づいて状態値を補正する状態値補正部51cを備え、前記信号出力部4は、前記状態値補正部51cにより算出された補正状態値を信号値に変換して前記制御装置7に出力するシミュレーション装置1。
(もっと読む)
適応制御装置
【課題】 人工衛星の姿勢について適応制御を行う際、未知のパラメータの随時更新によって、推定及び更新項がフィードバック制御系ゲインに加えられることになり、見かけ上ゲインが変更されたことになり、制御系安定性に影響を与えるため、制御系設計上の制約が大きくなるという問題があった。
【解決手段】 未知パラメータの推定及び更新を、姿勢変更開始から終了までの間で非随時とすることで、姿勢変更時に発生する姿勢角度誤差を、当該更新以降で抑制することによって、制御系の安定性を損なうことなく外乱を抑制することができる。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
外乱補償装置
【課題】モータに作用する負荷トルクの変動だけでなく、前記モータの電機子インダクタンス、直流抵抗(発熱により大きく変動する)および逆起電力定数の影響の変動をも補償できる外乱補償装置を提供する。
【解決手段】モータ3の回転速度を検出する速度センサ11と、モータ3の電機子インダクタンスL、直流抵抗Rおよび逆起電力Eemfがモータ3の回転動作に与える影響を反映させた影響合成信号ω(JLs2+JRs+KtKemf)を、回転速度ωから生成する合成信号生成部13と、影響合成信号に基づいて、前記電力供給指令値Eiを補正する補正部15と、を備える。
(もっと読む)
位置決め制御装置の振動抑制制御装置
【課題】フィルタ位相遅れの影響を受けずに振動の抑制を可能とする。
【解決手段】外乱オブザーバ10を用いた加速度制御系を含む位置決め制御装置の振動抑制制御装置において、位置指令の部分に低域通過フィルタ12を挿入し、位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記位置指令部分の低域通過フィルタ12のカットオフ周波数とする。ここで、前記位置指令の部分に加えて、速度フィードフォワード指令の部分にも低域通過フィルタ14を挿入し、前記位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記速度フィードフォワード指令部分の低域通過フィルタのカットオフ周波数とすることができる。
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
制御対象の制御入力決定手段
【課題】制御対象に入力する制御入力を生成する複数の制御関数の重みを自動的に決定する制御入力決定手段を提供する。
【解決手段】重みが設定された複数の制御関数を有する制御式を用い入力される車両4の制御入力決定手段2であり、価値決定手段6が有する価値部分空間情報に基づいて要求指令に対応する状態の価値と重みの関係データを求め、方針決定手段8で関係データから制御目的を達成する最適化重みを選択し、最適化手段10でその最適化重みを制御式に適用して制御入力を生成し、その制御入力により車両4を制御する。次に、状態抽出手段12でその制御後の車両4の状態を抽出する。価値更新手段14で車両4の制御前の状態と制御後の状態との変化に基づいて、価値部分空間情報の価値を更新する。さらに、評価手段16で制御後の状態と制御目的の目標値との差を求め、その差に基づいて価値更新手段14の価値の更新を補正する制御入力決定手段2。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
車両の制御装置
【課題】ダイナミクスを考慮したモデリングを可能にして推定精度を向上させると共に、限られたメモリ容量しか実装できない車両へのJITモデリングの適用を可能にするようにした車両の制御装置を提供する。
【解決手段】車両の運転を示すパラメータ群を計測し(S10)、計測されたパラメータ群を入力とし、対応して設定された出力と共に入力データuDB(i)、出力データyDB(i)として時系列に従って蓄積して蓄積データを得(S12)、入力に対して時刻tのときのモデルを同定するための要求点を設定し(S14)、設定された要求点と蓄積入力との距離を過去の入力も含めて求めて類似度を算出し(S16)、蓄積データから距離が小さいデータの集合を探索して近傍のデータとして決定し(S18)、それに含まれる出力データから推定出力を算出し(S20)、それに基づいて車両の運転を制御する(S22)。
(もっと読む)
モータ制御装置及び制御方法
【課題】 いかなる条件でサーボシステムが不安定になった場合にも発振して暴走するような危険な状態を回避することができるモータ制御装置及び制御方法を提供する。
【解決手段】 駆動系の発振状態を検出する発振検出部103と、トルク指令urefを予め設定したリミット値TLIMT以下に制限するリミット演算部5と、発振検出部103が発振を検知して発振中であると判断している間のみ、トルク指令urefをリミット演算部5を介して出力する切り替えスイッチ1、及び積分制御器3への入力をオフとする切り替えスイッチ2とを備えた。
(もっと読む)
位置決め制御装置及びレーザ加工機
【課題】
位置決め時間を短くする位置決め制御装置を提供する。
【解決手段】
モータの位置決め制御を行う閉ループ制御系の位置決め制御装置100であって、モータの目標位置が入力される目標位置入力ブロック1と、モータの実位置及び実速度をフィードバックして、目標位置入力ブロック1に入力された目標位置とモータの実位置との偏差に応じた第一の目標指令信号を生成する制御則A(17a)と、モータの実位置及び実速度をフィードバックして、目標位置とモータの実位置との偏差に応じた第二の目標指令信号を生成する制御則B(17b)と、目標位置に応じて、第一の目標指令信号と第二の目標指令信号とのいずれかをモータに入力するように切り替えるスイッチブロック5とを有し、制御則A及び制御則Bは、閉ループ制御系の極配置が互いに異なるように設定されている。
(もっと読む)
制御装置、制御プログラム及び方法
【課題】ニューラルネットワーク制御に係る処理負荷を軽減させる制御装置、制御プログラム及び方法を提供する。
【解決手段】互いにネットワーク構成が異なる複数のニューラルネットワークのうち、所定のニューラルネットワークである第1ニューラルネットワークを選択し、複数のニューラルネットワークのうち、第1ニューラルネットワークとは異なるニューラルネットワークである第2ニューラルネットワークを選択し、第1ニューラルネットワークによる制御と、第2ニューラルネットワークによる制御とによる制御誤差を測定し、第1ニューラルネットワークによる制御誤差と、第2ニューラルネットワークによる制御誤差とを比較し、より制御誤差が低いニューラルネットワークを判断する選択部16と、選択部16によってより制御誤差が低いと判断されたニューラルネットワークによりシステムの動作を制御する算出部16及び最終コントローラ102とを備える。
(もっと読む)
制御装置
【課題】操作量の算出に用いる参照速度を、推定速度から計測速度に切り替える制御装置において、当該切り替えによる影響を抑える。
【解決手段】本発明が適用されたプリンタ装置は、目標速度Vrと参照速度Vgとの偏差E=Vr−Vgから、キャリッジに対する操作量Uを求め、キャリッジの速度を制御するが、制御初期段階では、参照速度Vgを、エンコーダ信号に基づくキャリッジの検出速度Vmではなく、関数A(t)=Va・tで定まる規定速度に設定する(Vg=A(t))。そして、最短速度推定領域通過後には、参照速度Vgの傾きVaを、参照速度Vgがキャリッジの実速度に一致する方向に、補正する。例えば、参照速度Vgがキャリッジの実速度より低ければ、参照速度Vgの傾きVaを、傾き(Va+Vb)(但し、Vb>0)に補正し、参照速度Vgが、キャリッジの実速度に一致すると、参照速度Vgを、検出速度Vmに切り替える。
(もっと読む)
41 - 60 / 235
[ Back to top ]