
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
101 - 120 / 235
振動低減装置のコントローラの設計方法、振動低減装置のコントローラ及び振動低減装置
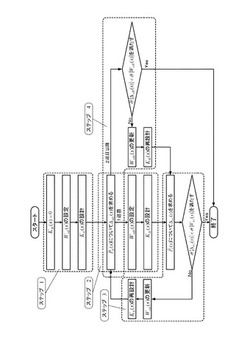
【課題】騒音抑制や速応性などに関する制御性能およびロバスト安定性の両面を考慮して複数の周波数帯域の振動の低減をそれぞれ対応して制御する複数のコントローラの設計方法等を提供することにある。
【解決手段】複数のコントローラのうち1つのコントローラについて、1つのコントローラを除く他の1以上のコントローラでフィードバックした状態で1つのコントローラの制御対象からモデル誤差を求め、当該モデル誤差を用いてロバスト安定性を満たす重み関数を求めて1つのコントローラを設計する。これにより、周波数帯域を分割して各帯域のモデルを低次元で同定することができ、モデル化のための計算時間の短縮、モデル化精度の向上を達成することができる。各帯域用コントローラは、それぞれの帯域に対応した低次元モデルから設計されるため、制御系設計の高効率化を図ることができると同時に設計されるコントローラも低次元で構成することができる。
(もっと読む)
NC制御のサーボ駆動装置

【課題】 装置構成が変更された場合であっても、サーボ制御パラメータを適切に設定することができるサーボ制御パラメータの設定機能を備えるサーボ制御装置を提供する。
【解決手段】 サーボ制御を行うNC制御装置に、予め定める同一の動作パターンを周波数を変えて指令する動作パターン出力部11と、指令データと応答データとを記憶する記憶部10,12と、指令データと応答データとからゲインの周波数特性を算出する周波数特性作成部13と、作成された周波数特性の特徴を抽出する特徴抽出部14と、ゲインが予め定める範囲に入るまで、サーボ制御パラメータの値を代えるパラメータ作成部15とを設ける。
(もっと読む)
位置制御装置
【課題】モータを駆動源とする位置制御装置において、あらゆる動作条件下で外乱を精度良く補償できるようにする。
【解決手段】外乱補償回路21は、外乱の位置特性を近似する位置外乱推定回路22と、外乱の速度特性を近似する速度外乱推定回路23と、外乱の加速度特性を近似する加速度外乱推定回路24と、外乱の加加速度特性を近似する加加速度外乱推定回路25とから構成されている。この外乱補償回路21の各推定回路22〜25は、それぞれ位置指令、速度指令、加速度指令、加加速度指令を入力とし、各推定回路22〜25の出力の和を外乱補償量Disとする。そして、プラントへの入力に外乱補償量Disを足し合わせることで、実外乱を相殺して軌跡追従精度を向上させる。
(もっと読む)
フィードバック制御装置及びフィードバック制御方法
【課題】制御対象の動作状態を検出する状態検出器の精度が悪化しても、制御対象に発生する振動を悪化前と同等のレベルに抑制することが可能なフィードバック制御装置及びフィードバック制御方法を提供する。
【解決手段】フィードバック制御装置100を、レゾルバ信号に基づいて、回転軸の回転位置及び回転速度を算出するレゾルバ信号処理部10と、レゾルバ信号処理部10からの回転速度信号に基づき、フィルタリングを行うか否かを判断する判断部11と、モータの制御信号を生成する制御信号生成部12と、レゾルバ信号処理部10からのフィードバック信号から誤差成分の周期情報を検出する誤差周期検出部13と、回転位置指令信号又はフィードバック信号における誤差成分の周波数を算出する誤差周波数算出部14と、誤差周波数算出部14で算出した周波数に対応するフィルタを用いて制御信号をフィルタリングするフィルタリング部15とを含んだ構成とした。
(もっと読む)
XYステージ
【課題】ステージの機械的な特性に基づく位置決め誤差を補正できるXYステージを実現する。
【解決手段】XYステージにおいて、下軸リニアモータの軸方向及び上軸リニアモータの軸方向の所定距離毎のロール角,ピッチ角,ヨー角を測定して収集する第1データ収集手段及び第2データ収集手段と、前記第1データ収集手段の収集データ及び前記第2データ収集手段の収集データに基づいてロール角,ピッチ角,ヨー角の変化を関数で近似する第1関数化手段及び第2関数化手段と、前記第1関数化手段及び第2関数化手段の関数に基づいて下軸及び上軸の垂直真直度と水平真直度を演算する第1積分演算手段及び第2積分演算手段と、前記位置指令値、前記第1関数化手段及び第2関数化手段の関数データ、前記第1積分演算手段及び第2積分演算手段の垂直真直度と水平真直度データに基づいて、前記上軸スライダの絶対座標位置を演算する絶対座標位置演算手段と、を備える。
(もっと読む)
シミュレータ及び記憶媒体及びプログラム及び制御装置及びシミュレータの制御方法
【課題】本発明は制御装置を代えずに制御システムを高機能化及び高速処理化することを課題とする。
【解決手段】シミュレータ10には、シーケンサ20と、軌道生成器30と、理想フィードバック制御器40と、ホルダ50と、実システムモデル60とがコンピュータ上の仮想機器として形成される。理想フィードバック制御器40は、シミュレータ10上において、制御対象モデル90の状態量と、動作指令パターンから実システムモデル60への入力を決定し、フィードバックループを策定すると共に、実システムモデル60への入力を時系列データとしてメモリ15に出力する。ホルダ50は、シミュレータ10上において、実システム110上のシーケンサ112のサーボサイクル毎に演算結果によって値が更新され、次のサーボサイクルまで値を保持する。ホルダ50で生成される理想制御入力の更新周期は、シーケンサ112と同じサーボサイクルになる。
(もっと読む)
制御マップ自動構成装置
【課題】制御対象に生じ得る種々の状況を適切に認識、分類して制御マップの自動構成を行うことが可能な制御マップ自動構成装置を提供する。
【解決手段】制御マップ自動構成装置1は、入力された状態ベクトルxに特定の代表ベクトルWkを対応づけて出力する状況認識手段3と、制御パラメータPnを出力する複数の制御マップMnと、代表ベクトルWkと制御マップMnとを対応づけて、前記特定の代表ベクトルWk*に対応する制御マップMselectが出力する制御パラメータPselectを出力する制御マップ切替手段4と、複数の制御マップMnの各評価値Qnを算出する評価値算出手段6と、評価値Qnに基づいて状況認識手段3において代表ベクトルWkを増殖させるか否かおよび制御マップMnを新たに生成するか否かを判定する判定手段7と、制御マップMnの評価値Qnに基づいて制御マップMnを更新する更新手段8とを備える。
(もっと読む)
ファジィ制御装置、レーン走行支援装置、および操舵補助装置
【課題】ファジィルールを合理的に選定する。
【解決手段】ファジィ制御装置は、複数の入力変量に対しファジィ推論を行って出力変量を生成し、生成した出力変量を制御対象に出力して制御するものである。ファジィ推論に利用されるファジィルールは、複数の入力変量に関するリヤプノフ関数Vの安定条件を示す条件式dV/dt<0と、複数の入力変量の少なくとも1つの時間微分と出力変量との対応関係を示す関係式とに基づいて選定される。これにより、各入力変量に対応するメンバーシップ関数を2つに減らし、ファジィルールの数を2n(nは入力変量の数)に減らすことができる。
(もっと読む)
カルマンフィルタを用いて動的モデルの状態を初期化するためのシステム及び方法
【課題】 ガスタービンエンジンを制御する適応制御システム及び方法の提供。
【解決手段】 カルマンフィルタその他同種のフィルタを用いて、動的モデルの状態を初期化するためのシステム及び方法を提供する。制御方法は、エンジン(110)の現在の状態に関する動的情報(Y)を得る段階と、動的情報(Y)の少なくとも一部を用いてエンジンモデル(130)を初期化する段階であって、動的情報(Y)に少なくとも部分的に基づく1以上の値をエンジンモデル(130)に入力する段階と、上記1以上の値に少なくとも部分的に基づいて、モデル(130)からエンジン(110)の現在の状態を求める段階と、エンジン(110)の状態に少なくとも部分的に基づいて、エンジン制御動作を求める段階と、エンジン制御動作を実行するための制御コマンド(U)を出力する段階とを含む。
(もっと読む)
XY方向自動送り縫いミシンのXY軸モータ制御方法及び装置
【課題】XY方向自動送り縫いミシンのXY軸モータ制御装置の全ての共振モードを安定化する。
【解決手段】1次の共振モードに対しては、2慣性共振系の振動抑制に有効な共振比制御を適用し、それより高次の振動モードに対しては、位相進み補償を用いて、全ての共振極を安定化する。一方、軸ねじれ反力が無視できる剛性の高い負荷に対しては、外乱オブザーバのみを用いて位相進み補償を行うことで、全ての共振極を安定化する。
(もっと読む)
制御装置
【課題】時間的に変化する指令値に対して制御量がなるべく正確に追従するとともに、指令値が停止した後にもオーバーシュートを抑制しながら、制御量を早く整定させる制御装置を提供する。
【解決手段】制御装置は、制御対象から入力される制御量と外部から入力される指令値とに基づいて算出する操作量を上記制御対象へ出力する制御装置において、上記指令値が連続的に変化する時点において上記指令値に対して先行する予測指令値を少なくとも上記指令値に基づいて生成する予測指令生成部と、外部から入力される停止目標値に基づく制限値で上記予測指令値を制限することにより追従指令値を生成する制限器と、上記制御量が上記追従指令値に追従するように上記制御対象を制御する上記操作量を出力する追従制御部と、を備える。
(もっと読む)
運動制御システム
運動制御システム(10)は、オペレータ入力部材(20)を有するオペレータインターフェース(13)と、オペレータ入力部材に駆動連結される制御可能な力フィードバック装置(18)とを含む。運動制御システムはまた、第2の操作パラメータの目標値(TARv)と第2の操作パラメータの実際値(ACTv)との間の制御誤差(Ec)に少なくとも部分的に関係するように第1の操作パラメータを調整することを含めて、1つ以上の可動構成要素(12)の運動を調整する制御部(14)を含むことが可能である。第2の運転パラメータの目標値は、オペレータ入力部材の運動に少なくとも部分的に基づくことが可能である。制御部はまた、制御誤差に少なくとも部分的に関係するように、および制御誤差に対するフィードバック力の導関数が少なくとも部分的に制御誤差に応じて変化するように、制御可能な力フィードバック装置を操作してフィードバック力をオペレータ入力部材に提供することが可能である。  (もっと読む)
(もっと読む)
制御マップ最適化装置
【課題】制御対象の特性に依拠せず制御マップの最適化を行うことが可能な汎用的な制御マップ最適化装置を提供する。
【解決手段】制御マップ最適化装置1は、入力された引数x、yに対応する格子点(xi,yj)に設定された制御パラメータPi,jまたは引数x、yに対応するマップ位置(xE,yE)の近傍の格子点に設定された制御パラメータPi,jから補間により算出した制御パラメータPEを出力する制御マップMと、制御パラメータが取るべき値に関する情報Qと出力された制御パラメータPEとに基づいて制御マップMの制御パラメータPi,jの最適化を行う最適化手段3とを備え、最適化手段3は、最急降下法により情報Qと制御パラメータPEとから作成された単峰性関数の誤差関数Errorに基づいて制御マップMにおけるマップ位置(xE,yE)の近傍の格子点に設定された制御パラメータPi,jの値を更新し、この更新処理を繰り返す。
(もっと読む)
柔軟アームを有する移動ロボット
【課題】柔軟アームを有する移動ロボットにおいて、柔軟アームの振動および姿勢を、走行路面の環境に左右されることなく、安定的にかつ有効に制御すること。
【解決手段】走行機体およびブーム104にセンサ110〜116を取り付けて最小限の状態変数を計測し、計測できない状態変数はオブザーバによって推定して、ブーム104の姿勢および振動を状態フィードバック制御する。また、フィードバック制御に加えて、目標値変動補償用のフィードフォワード制御および外力軽減用のフィードフォワード制御を併用する。
(もっと読む)
電動機の位置制御装置
【課題】一定加速中にも回転角指令信号と実回転角信号との偏差を小さくする電動機の位置制御装置を得る。
【解決手段】速度フィードフォワード信号演算回路7は、回転角指令信号θmsから速度フィードフォワード信号ωffを算出。機械系模擬回路4は、トルク伝達機構、負荷機械及び直流電動機11を近似し、トルク信号τ2から模擬速度信号ωa及び模擬回転角信号θaを出力。第2の位置制御回路5は、θms及びθaから速度信号ω2を出力。第1の速度制御回路9は、速度信号ω3及び実速度信号ωmからトルク信号τ1を出力。第2の速度制御回路6は、ω2、ωa及びωffからτ2を出力。制御手段は、τ1とτ2に基づいて電動機11のトルクを制御する。
(もっと読む)
多軸工作機械の送り駆動系用最適設計支援装置およびその装置用プログラム
【課題】複数の送り駆動系を同時に動かして所望の形状を創成する場合に、サーボゲインを最適化する設計を容易に行い得るようにすることにある。
【解決手段】コンピュータにより構成される、多軸工作機械の送り駆動系用の最適設計支援装置であって、前記送り駆動系を表す数学モデルを用いて、その送り駆動系に関するシミュレーションを行い、その結果を出力するシミュレーション手段2と、前記送り駆動系に関する実験結果を入力されて、その実験結果と前記シミュレーションの結果との差が小さくなるように、前記送り駆動系を表す数学モデルのパラメータを同定するパラメータ同定手段1と、前記同定したパラメータに基づき、前記送り駆動系を表す数学モデルのサーボゲインを自動調整するサーボゲイン自動調整手段3と、を具えてなる、多軸工作機械の送り駆動系用最適設計支援装置である。
(もっと読む)
位置制御装置、位置制御方法及び位置制御プログラム
【目的】物体の位置を、物体を保持する移動機構によって速度制限を付しながら目標位置に速やかに追従させる技術を提供する。
【構成】本発明に係る位置制御装置は、物体を保持して移動させる移動機構と、物体に加える力の指令値を移動機構へ出力するコントローラを備える。図はコントローラ内の制御ブロック図である。図においてpdは物体の位置を表し、psは仮想質点の位置を表す。仮想質点は物体と仮想的な連結要素で連結されている。コントローラは、スライディングモード制御に基づいて物体に加えるべき力fを算出する。移動機構は、力fを物体に加えるように制御され、物体を移動させる。コントローラ内で力fを算出する過程において、移動機構によって実現される物体の速度の大きさに上限値Vが設定される。これにより、物体の速度の大きさを上限値V以下に制限しながら物体を目標位置へ追従させる位置制御が実現される。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 負荷変動などの悪影響を抑制し、ロバストかつ目標指令に対して高速な追従性能を実現することができるサーボ制御装置とその制御方法を提供する。
【解決手段】 モデル位置制御部(72)と、第1モデル速度制御部(74)と、第2モデル速度制御部(76)と、モデルトルク指令により加速されモデル速度を生成するノミナルプラント(77)と、第2モデル速度の高域を遮断し第1モデル速度生成する第3ローパスフィルタ(78)と、第1モデル速度を積分してモデル位置を生成するモデル積分部(79)と、からなる規範モデル部(7)を備え、第1モデル速度指令と速度指令を加算して新たな速度指令を生成し、第1トルク指令とモデルトルク指令を加算して新たな第1トルク指令を生成し、モデル位置を第1位置指令とする。
(もっと読む)
シーク制御方法、シーク制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
目標状態を定める方法、および、目標状態を定めるための装置
本発明は、複数の構成要素を有するシステム内の目標状態を定める方法であって、その際、システムでは、複数の構成要素の可用性に応じて優先度が異なるシステム状態が選択可能であり、最も優先度が高いシステム状態が選択可能かどうかについて検出する工程(102)と、最も優先度が高いシステム状態が選択可能である場合に最も優先度が高いシステム状態を目標状態として定める工程(104)と、最も優先度が高いシステム状態が選択可能ではない場合に、次に優先度が高いシステム状態が選択可能かどうかについて検出し(112)、次に優先度が高いシステム状態を目標状態として定める工程(114)とを含む、複数の構成要素を有するシステム内の目標状態を定める方法に関する。 (もっと読む)
101 - 120 / 235
[ Back to top ]