
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
81 - 100 / 235
駆動装置、画像形成装置
【課題】低コストで適切に駆動手段のフィードフォワード制御を行うことができる駆動装置、及び、その駆動装置を用いた画像形成装置を提供する。
【解決手段】駆動源と、駆動源により駆動される被駆動部と、被駆動部での非周期的な速度変動を検知する速度変動検知手段と、速度変動検知手段により検知された非周期的な速度変動を低減するように予め設定されたフィードフォワード目標値を用いてフィードフォワード制御を行なう駆動制御部とからなる駆動装置において、上記速度変動検知手段により検知される速度変動は所定時間幅と所定振幅とからなる正弦波であり、上記フィードフォワード目標値は、上記所定時間幅と上記所定振幅とから求められる上記正弦波を矩形近似した矩形波とするものである。
(もっと読む)
モータ制御装置及びモータ制御方法

【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
プラントの制御装置、及び火力発電プラントの制御装置
【課題】本発明の目的は、予測モデルの特性が実際のプラントの特性と相違する場合でも、プラントの制御特性を良好に維持できるプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントに対する操作信号を生成する操作信号生成手段と、プラントの特性を模擬するモデルと、モデルで模擬した出力信号が予め設定された目標を満足するようにモデルの入力信号を生成する学習手段と、学習手段での学習結果に従って学習信号を計算する学習信号生成手段とを備え、更に、ある操作信号及び更新した操作信号をプラントに与えた結果として取得した該プラントの第1の計測信号及び第2の計測信号とその目標値との誤差である第1の誤差及び第2の誤差をそれぞれ計算する操作結果評価手段と、第2の誤差が第1の誤差よりも大きい場合に操作信号生成手段で生成する操作信号の補正信号を生成する補正信号生成手段とを備えるように構成した。
(もっと読む)
制御システムおよび制御支援装置
【課題】より適切なサーボの制御条件の設定を短時間で実現する制御システムおよび制御支援装置を得ること。
【解決手段】負荷装置113を駆動するモータ112を制御するサーボシステム100と、前記サーボシステム100に接続され、前記モータ112を所定の目標動作に制御するために設定される調整パラメータの最適値を自動調整する制御支援装置200と、で構成され、前記制御支援装置200における調整パラメータ調整部210はシミュレーション結果に基づいて、調整すべきパラメータやその調整範囲を自動設定し、調整範囲内で調整パラメータの最適値をモータ112の実動作の結果に基づいて自動調整する。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
サーボアクチュエータ
【課題】誰でも簡便にゲイン調整を行うことができるサーボアクチュエータの実現する。
【解決手段】モータの速度を制御する速度フィードバックループを有し、この速度フィードバックループにノッチフィルタ手段を挿入して機械共振を除去するサーボアクチュエータにおいて、前記速度フィードバックループの周波数応答特性を示すデータを取得するデータ収集手段と、前記データ収集手段で取得されたデータを移動平均処理する移動平均手段と、この移動平均手段で得られたデータと、前記データ収集手段で得られたデータとを比較して、前記速度フィードバックループの共振特性を抽出する比較手段と、前記比較手段で抽出された共振特性に基づいて前記ノッチフィルタ手段の周波数及びQ値を設定するノッチフィルタ設定手段と、を備えることを特徴とする。
(もっと読む)
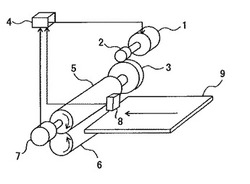
液圧作動ブームの調整方法、装置およびコンピュータプログラム
本発明は、液圧作動ブームの動作を調整する方法および装置ならびにコンピュータプログラムに関するものであり、ブーム(1)は、液圧アクチュエータ(5a〜5b、7a〜7b)によって相対的に動くように連結された少なくとも2つの可動的相互連結ブーム部(1a、1b)と、液圧アクチュエータを制御する制御手段(13、14)と、ブーム部(1a、1b)間の位置を検出する検出器(15)とを含み、それにより、ブーム(1)の動作を調整するために、制御手段にある継ぎ手制御装置の、動きに固有の調整パラメータを個々の動きごとに設定することができる。本発明では、ブーム部(1a、1b)の相対的動きをブーム部(1a、1b)間の所定の位置に対してその両側において制御し、制御信号に応じて検出器(15)から取得した実際の位置および運動速度の値を理論上の位置および運動速度の値と比較し、これらの値の間の差に基づいて継ぎ手制御装置の調整パラメータを調整する。 (もっと読む)
位置制御装置
【課題】加減速の小さい動作領域において、制御対象プラントが振動特性を有していても、外乱抑制性能の向上を達成する位置制御装置を提供する。
【解決手段】指令応答性能を重視したPI制御器とロバスト外乱抑制性能を重視したロバスト制御器を並列配置した速度制御器を構成し、加速度情報に基づいて、これらを切換えて制御する。切換え時におけるロバスト安定性の確保と円滑な切換え動作を実現するため、切換え時間を持った漸次切換えやトルク補償を行う。
(もっと読む)
多関節型ロボットの制御方法
【課題】静的な条件で計測し、テーブル化されたコギング補償電流テーブルによる従来のFFコギング補償方式では、重力補償電流による最適位相の変化やエンコーダ取付誤差による最適位相の誤差に対応した位相シフトが行われず、十分な振動抑制効果を発揮できないという課題を有していた。
【解決手段】重力トルク補償電流の検出及びその検出値によるコギング補償位相の補正手段を持ち、さらに、FFコギング補償無効時のモータ電流からコギング周波数成分の検出及びその検出値によるコギング補償最適位相のモータ個体差の補正手段を持つことで、重力補償電流によるコギング補償の最適位相の変化あるいはエンコーダ取付誤差による最適位相誤差が存在しても、コギングトルクに起因する振動を抑制することができる。
(もっと読む)
制御装置
【課題】可変バルブリフト装置をPI制御等のI項(積分項)を用いた制御方式で制御する場合に、可変バルブリフト装置の定常時のエネルギ消費量を低減できるようにする。
【解決手段】可変バルブリフト装置が定常状態のときに、目標リフト量を揺らぎ幅Wだけ上り時間Tupで増加させた後に上り時間Tupよりも長い下り時間Tdownで減少させて元の値に戻す処理を周期的に繰り返す揺らぎ制御を実行する。この揺らぎ制御では、目標リフト量の上り時間Tupよりも下り時間Tdownを長くすることで積分項の増加量よりも減少量を多くして積分項を元の値よりも減少させる処理を繰り返すことで積分項を徐々に減少させることができるため、ヒステリシス特性によって制御デューティがエネルギ消費量の大きい方の値になった場合でも、ヒステリシス特性による積分項の増加分を徐々に減少させて、制御デューティをエネルギ消費量の小さい方の値に収束させることができる。
(もっと読む)
モータ制御装置と制御定数調整方法
【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
機械的共振周波数補償装置
【課題】共振周波数を算出する際の処理速度を向上させる。
【解決手段】サーボモータシステム1は、モータ2に接続されるサーボコントローラ3に機械的共振周波数補償装置21が設けられている。機械的共振周波数補償装置21は、エンコーダ4から速度フィードバック値が入力されるバンドパスフィルタ22と、共振周波数推定器23と、ノッチフィルタ係数発生器24とを備え、共振周波数推定器23は共分散行列の逆行列の値を用いた最小二乗理論によって算出される収斂値としてノッチフィルタの係数を求めるように構成されている。
(もっと読む)
ベルト駆動制御装置及び画像形成装置
【課題】無端状ベルトの回転むらを原因とする各色の位置ずれを防止することができるベルト駆動制御装置及び画像形成装置を提供する。
【解決手段】無端状ベルトの回転速度が目標速度となるように、規定の制御周期毎に、速度検出手段によって検出された無端状ベルトの速度に基づいて、ステッピングモータの単位時間当たりの駆動パルス数をフィードバック制御する回転制御手段を具備し、回転制御手段は、規定の制御周期毎にフィードバック制御するステッピングモータの単位時間当たりの駆動パルス数について、前回の単位時間当たりの駆動パルス数に対する今回の単位時間当たりの駆動パルス数の増減値である制御値を規定の範囲に制限する。
(もっと読む)
拡張仮想パワーモニタを備えることにより制御対象の安定性を評価解析する機能を備えた制御システム
【課題】システムに対して流入する仮想パワーを観測することによって当該システムの安定性を評価解析する制御システム2に対して、その安定・不安定の判定を是正する。
【解決手段】ユーザ制御対象3と、ユーザ制御則5と、ユーザ制御対象3からのフィードバック信号を受けてユーザ制御対象3に操作量を入力し得る保守的な制御則Hと、保守的な制御則Hからユーザ制御対象3へ仮想的に伝達される仮想パワー及び保守的な制御則からの操作量の大きさ及びユーザ制御対象の出力の大きさを観測する拡張仮想パワーモニタ10と、を備える。拡張仮想パワーモニタ10は、仮想パワーPv(t)のa倍および保守的な制御則からの操作量の大きさを二乗したb倍及びユーザ制御対象の出力の大きさを二乗した−1倍を観測し、それによって安定性の評価関数Ex(t)に、ユーザ制御システムの入出力ゲインが小さいほど安定方向に移行させる項を含める。
(もっと読む)
リニアアクチュエータ
【課題】位置情報の差分値とサンプル時間に依存することなく速度情報を生成して制御帯域を上げることを可能とするリニアアクチュエータを実現する。
【解決手段】面モータを有するスライダの位置検出値と位置指令値との偏差を演算して速度指令値を出力する位置制御手段と、前記スライダの速度検出値と前記速度指令値との偏差を演算して前記面モータに推力指令を出力する速度制御手段とを具備するリニアアクチュエータにおいて、
前記位置検出値及び前記推力指令に基づいて、前記速度検出値を推定演算する状態推定器を備える。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
電動機の制御装置
【課題】装置の共振周波数の大きな変化による短時間発振を抑制することができるモータ制御装置を提供することを目的とする。
【解決手段】ノッチ周波数とノッチ幅を含むノッチフィルタパラメータの変更が可能であるノッチフィルタと、振動周波数を推定する振動周波数推定手段を有し、ノッチフィルタのノッチ周波数と推定された振動周波数との間の周波数を前記ノッチフィルタの新たなノッチ周波数として設定するとともに、元のノッチ周波数成分と推定された周波数成分が減衰するようノッチ幅を変更するノッチフィルタパラメータ設定手段を有する。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 モータのフィードバック速度にかかわらず外乱抑制性が高く滑らかな制御ができるサーボ制御装置とその制御方法を提供する。
【解決手段】 速度制御器(1)、電力変換器(2)、オブザーバ(5)、第1フィルタ(6)、第2フィルタ(7)、加算器(8)を備え、オブザーバから出力される推定速度Vfb^を第1フィルタ(6)でフィルタ処理した信号と速度検出値Vfbを第2フィルタ(7)でフィルタ処理した信号とを加算した信号を速度制御器(1)で使用する速度フィードバックVfb2として使用するようにした。
(もっと読む)
誤差過大検出機能を有する制御装置
【課題】フィードフォワード制御が導入された制御装置の位置偏差異常をいち早く検出する。
【解決手段】位置偏差推定処理部40において、例えば式V/PG×(1−α)(ただし、V:位置指令の1階微分値、PG:位置制御器16におけるポジションゲイン、α:フィードフォワード項算出部32におけるフィードフォワード係数)により位置偏差推定値Errを算出し、それにマージンΔEを加算した誤差過大検出レベルにより位置偏差の異常を検出する。
(もっと読む)
81 - 100 / 235
[ Back to top ]