
Fターム[5H004HB08]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 速度、角速度 (235)
Fターム[5H004HB08]に分類される特許
61 - 80 / 235
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 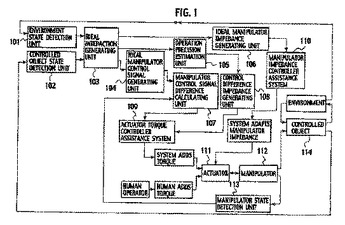 (もっと読む)
(もっと読む)
機械制御装置
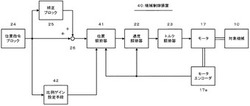
【課題】 先端に重量物が取り付けられた長尺のアームを移動させる場合でも、振動を伴うこともなく目標位置に停止させる機械制御装置を提供する。
【解決手段】 機械制御装置40には、調節動作の際の比例ゲインが可変構造の位置調節器41を備え、さらに、この機械制御装置40には位置指令ブロック24の出力である位置指令値に基づいて、位置調節器41の比例ゲインを可変する指令を送出する比例ゲイン設定手段42を備えている。
この比例ゲイン設定手段42では、位置指令ブロック24からの位置指令値に基づく移動速度が遅いとき、すなわち、移動距離が短い位置指令値のときには位置調節器41の比例ゲインを大きく設定し、前記位置指令値に基づく前記移動速度が速いとき、すなわち、移動距離が長い位置指令値のときには前記比例ゲインを小さく設定するようにしている。
(もっと読む)
車両用速度制御システム
本発明は、予め設定された目標速度域内で燃費を指向しながら車速を制御するための、燃費指向の速度制御モードを起動するための操作ユニットと、前記燃費指向の速度制御が起動状態にあるときに、予め設定された最大エネルギ消費値に配慮しながら、前記予め設定された目標速度域内で車速を制御するようになっている、制御ユニットとを備えた、車両用の速度制御システムに関する。その際に車速は、前記予め設定された目標速度域内に位置する車速に調整することが可能である限りは、前記予め設定された最大エネルギ消費値を上回ることがないように、前記予め設定された最大エネルギ消費値に配慮しながら制御される。 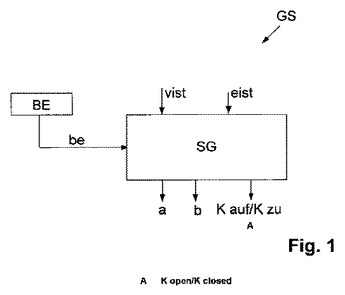 (もっと読む)
(もっと読む)
モータ制御装置

【課題】 フィードバック制御系のサンプリング速度とモデル制御系のサンプリング速度との差に起因する影響を、従来よりも少ない演算量で抑制して、モデル追従制御を実施できるモータ制御装置を提供する。
【解決手段】 速度制御器115は、モデル制御系105のサンプリング速度の遅れに相当する伝達関数を有するローパスフィルタ113と、速度積分器117を含む積分制御系116と、比例制御系118と、速度比例ゲイン乗算部119とを含んでいる。積分制御系116は、加算部SP2によって加算された速度指令とモデル速度指令とを合算した指令から、ローパスフィルタ113から出力された遅延速度情報を減算部SP4で減算した指令を、速度積分器117に入力する。
(もっと読む)
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。 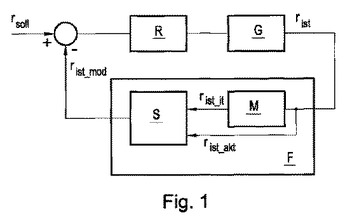 (もっと読む)
(もっと読む)
むだ時間同定装置
【課題】 制御対象の特性によらず、容易にかつ確実に正確にむだ時間を同定することができるようにする。
【解決手段】 モータ速度を入力し前記モータ速度が発振しているかどうかを判定した結果を示す発振検出信号を出力する発振検出器106と、前記モータ速度を入力しその入力信号に基づいて制御対象のメカパラメータを同定し出力するメカ同定器107と、前記発振検出信号を入力し前記モータ速度は発振していなければ速度制御器に設定するパラメータである制御ゲインをさらに大きい値として出力する制御ゲイン調整器108と、制御ゲインと発振検出信号とメカパラメータを入力し臨界周波数を出力する臨界周波数演算器109と、前記制御ゲインと前記発振検出信号と前記メカパラメータと前記臨界周波数を入力しむだ時間同定値を算出するむだ時間同定器110と、を備える。
(もっと読む)
ゲイン調整装置、ゲイン調整方法、ゲイン調整プログラム
【課題】外乱変動の影響を低減し、高精度にループゲインの調整を行うことが可能なゲイン調整装置、ゲイン調整方法、ゲイン調整プログラムを提供することを目的としている。
【解決手段】本発明では、閉ループ回路のループゲイン調整において、ループゲイン調整を複数回実行してループゲインを収束させ、ループゲインの値が収束した後に、外乱変動の影響を考慮して適切に設定された回数のループゲイン調整結果を平均した値を最終的なループゲインの値とする。
(もっと読む)
フィードフォワード信号を用いたディジタルサーボ制御装置
【課題】 モータ動作中の位置偏差を小さく、または、モータ位置決め時のオーバーシュート量を小さくすることができた、更に、モータ動作中の速度またはトルクフィードフォワード信号が量子化誤差の影響によるばたつきを低減して、モータが一定速度で動作している時の騒音を小さくすることができるフィードフォワード信号を用いたディジタルサーボ制御装置を提供する。
【解決手段】 フィードフォワード制御系が、位置指令に基づいて速度フィードフォワード信号vff0を生成する速度フィードフォワード作成部6と、前記位置指令に基づいてトルクフィードフォワード信号tffを生成するトルクフィードフォワード作成部8と、前記速度フィードフォワード信号vffおよび前記トルクフィードフォワード信号tffに基づいて速度フィードフォワード変更信号vffを生成する速度フィードフォワード変更部7と、を備える。
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
モータ制御装置
【課題】 制御則によらずクーロン摩擦同定が実施でき、トルク指令またはモータ速度が雑音信号を多く含み、最大静止摩擦などが存在する場合にも高精度に微少動作でクーロン摩擦同定を実施することができ、その同定結果に基づいて高精度な動作制御を実施できるモータ制御装置を提供する。
【解決手段】トルク指令周波数成分と正規化速度矩形波を入力しトルク指令正規化速度矩形波乗算値を出力するトルク指令正規化速度矩形波乗算値演算器111と、前記トルク指令正規化速度矩形波乗算値とモータ速度振幅を入力しトルク指令速度矩形波乗算値平均値を出力するトルク指令速度矩形波乗算値平均値演算器114と、前記トルク指令速度矩形波乗算値平均値と前記モータ速度振幅を入力しクーロン摩擦同定値を出力するクーロン摩擦演算器115と、を備える。
(もっと読む)
二次元型テーブル微小角度駆動機構の制御ループ
【課題】従来の二次元型テーブル微小角度駆動機構の制御ループは、第1〜第4ヒンジの共振が考慮されていないので、第1〜第4ヒンジの共振によって駆動誤差が生じる。
【解決手段】本発明による二次元型テーブル微小角度駆動機構の制御ループは、第2減算部300と第2乗算部400との間に介在され、第1補償乗算部810、第1積分部820、第2補償乗算部830、第2積分部840、及び加算部850から構成される補償演算手段800によって、機構部700の共振周波数ω0とダンピング比ζとを用いた補正角速度偏差850aが生成される構成である。
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
サーボ調整方法および装置
【課題】機械の条件が変動しても、フィードバック制御系の安定を確保することができるするサーボ調整方法を提供する。
【解決手段】複数の異なる条件の下で、それぞれ前記フィードバック制御系の周波数伝達関数を表すゲイン、位相の周波数特性を測定し、各条件の周波数特性の測定結果に基づいて、各周波数におけるゲインの最大値と、位相の最小値とを求め、各周波数におけるゲインの最大値からゲインの最大抱絡線と、位相の最小値から位相の最小抱絡線を求め、ゲインの最大抱絡線、位相の最小抱絡線を基準にして、ゲインの調整を行う。
(もっと読む)
回転数制御装置
【課題】計算周期を変更することによって回転数フィードバック制御を適切に行うことが可能な回転数制御装置を提供する。
【解決手段】回転数制御装置は、回転数センサの検出値に基づいて、回転体が目標回転数となるように回転数フィードバック制御を行う。計算周期変更手段は、回転数が所定値以下となった場合に、回転数が前記所定値よりも大きい場合と比較して、回転数フィードバック制御の計算周期を長く変更する。つまり、回転数が低下した際に、回転数センサの信号処理時間を伸ばした上で、回転数フィードバック制御における計算周期を擬似的に延長する。これにより、回転数が低下した際に、回転数フィードバック制御における指令値が非連続的に変化してしまうことを適切に抑制することが可能となる。
(もっと読む)
精密位置決め装置
【課題】 精密ないし微小な部品でも安定して位置決めしながら組立等の作業を行うことを可能にする精密位置決め装置を提供する。
【解決手段】 磁界に置かれたコイルを弾性案内部材により所定の方向に変位可能に支持し、該コイルに電流を流すことによってコイルを含むアクチュエータを駆動し、アクチュエータの変位により部品の位置決めを行うボイスコイルモータ5と、アクチュエータの変位を検出する変位センサ18と、変位センサで検出された変位から速度及び加速度を算出し、アクチュエータの位置、速度及び加速度と任意に設定した外力とからアクチュエータの駆動力を演算してそれに応じたコイル供給電流を出力するコントローラ6とを備える。
(もっと読む)
サーボ装置
【課題】サーボ装置で駆動される模型飛行機の引込み脚を、停止位置に保持電流を消費せずに維持できるようにする。
【解決手段】サーボ装置10は、出力軸の目標位置信号と、サーボモータ16から得られる出力軸の現在位置信号等との誤差を増幅手段21で増幅し、PWM 波形としてモータに与え、誤差が小さくなる方向にモータを駆動する。不感帯設定手段23は、誤差がフィードバック制御によって修正すべき大きさか否かを判断する基準値を設定する。モータ停止と判断された場合、不感帯は通常の0.4 °から10°に変更される。モータが停止すると外力が加わってもサーボ装置には停止位置で外力に対する保持電流は流れず、電力の無駄な消費が抑えられる。
(もっと読む)
倒立車輪式移動ロボットとその制御方法
【課題】重心位置や路面傾斜角が変動した場合であっても目標とする倒立走行を行うことが可能な倒立車輪式移動ロボットとその制御方法を提供すること。
【解決手段】本発明にかかる倒立車輪式移動ロボットで10は、駆動輪2を駆動する駆動部12と、倒立車輪式移動ロボット10の実状態を検出する検出部14と、検出部14によって検出した実状態と目的状態の偏差に応じて制御量を生成し、駆動部12に対して出力することにより、倒立走行を制御する倒立走行コントローラ11と、検出部14によって検出された車輪回転角速度又は車体の移動速度と、目標状態の車輪回転角速度又は車体の移動速度の偏差に応じた車体傾斜角補正量を、目標状態に含まれる目標車体傾斜角に反映させる車体傾斜角補正量算出部19とを備えている。
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
駆動装置、画像形成装置
【課題】低コストで適切に駆動手段のフィードフォワード制御を行うことができる駆動装置、及び、その駆動装置を用いた画像形成装置を提供する。
【解決手段】駆動源と、駆動源により駆動される被駆動部と、被駆動部での非周期的な速度変動を検知する速度変動検知手段と、速度変動検知手段により検知された非周期的な速度変動を低減するように予め設定されたフィードフォワード目標値を用いてフィードフォワード制御を行なう駆動制御部とからなる駆動装置において、上記速度変動検知手段により検知される速度変動は所定時間幅と所定振幅とからなる正弦波であり、上記フィードフォワード目標値は、上記所定時間幅と上記所定振幅とから求められる上記正弦波を矩形近似した矩形波とするものである。
(もっと読む)
61 - 80 / 235
[ Back to top ]