
Fターム[5H004KC54]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 検出値の変動に対するもの (47)
Fターム[5H004KC54]に分類される特許
1 - 20 / 47
設計装置及び設計プログラム
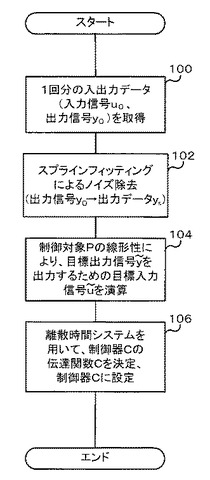
【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
モータ制御装置、及びモータ制御方法

【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
制振制御装置、制振制御方法およびコンピュータプログラム
【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御を行うフィードバック制御器の伝達関数を、制御対象であるプラントに加わる外乱の影響を考慮して適切に設定し、設計工数を抑制しつつ良好な制御性能を得ることができるプラントの制御装置を提供する。
【解決手段】 フィードバック制御器33は、プラント(1,17)の制御出力(KACT)が目標値(KCMDM)と一致するように、プラントへ入力する制御入力(KAF)を算出する。フィードバック制御器33の伝達関数C(z)は、プラントをモデル化することにより得られる制御対象モデルの伝達関数P(z)の逆伝達関数と、制御入力(KAF)に印加される外乱dの制御出力(KACT)への感度を示す感度関数S(z)を用いて定義される外乱感度相関関数との積で表され、感度関数S(z)は、プラントの応答特性を示す応答特性パラメータ(α)を用いて定義される。
(もっと読む)
制振装置
【課題】適応フィルタの発散を抑制して制振制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させた制振装置を提供する。
【解決手段】発散抑制モードにおいて、評価振動を構成する相殺振動(Vi4r+Vi4i)と所望の相殺振動Vi4iとの位相差βを低減して、適応フィルタ32fの算出が発散することが抑制される。そして、予め定めた伝達特性の位相成分を補正する場合に、位相成分の補正に起因して適応フィルタが発散するおそれのある通常モードから適応フィルタの発散を抑制する発散抑制モードに切り換えて、発散抑制モードにおいて位相成分の補正を実施するので、伝達特性を補正することによって補正後の伝達特性と現実の伝達特性との位相差が著しくかけ離れる場合であっても、適応フィルタの発散を抑制して制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させることが可能となる。
(もっと読む)
油圧圧下制御装置、油圧圧下制御装置の調整方法及び制御プログラム
【課題】
装置の稼働率を大きく損なうことなく、好適な制御応答が得られるような調整を行うことが可能な油圧圧下制御装置を提供すること
【解決手段】
油圧シリンダー11におけるピストンの位置の実測値を取得し、指令値及び実測値に基づいて油圧を制御する油圧圧下制御装置2と、油圧圧下制御装置2の制御ゲインを調整する制御ゲイン調整装置と、圧延機の動作状態を判断する圧延機状態判別部5とを含み、制御ゲイン調整装置4は、制御ゲインの調整を実行する際、圧延機が予め定められた所定の状態である場合、記憶されている周波数で位置指令値が振動する調整用信号を油圧圧下制御装置2にに対して出力し、調整用信号及び調整用信号に対する実測値に基づいて制御ゲインを調整することを特徴とする。
(もっと読む)
モータ制御装置
【課題】 モデル制御系のパラメータを簡単に調整でき、しかも、モデル速度制御器から出力されるトルク指令が過大になることがなく、より高速で振動のない位置決めを実現できるモータ制御装置を提供する。
【解決手段】 モデル制御系1は、モータについての第1の慣性系の機械モデルと、負荷についての第2の慣性系の機械モデルと、モータと負荷との間のねじりトルクについてのねじりトルクモデルと、フィードバック加速度指令S10をモデルトルク指令部8にフィードバックする第1の状態フィードバック系と、フィードバック速度指令S5をモデル速度指令部5に状態フィードバックする第2の状態フィードバック系とを備えている。モデル制御系の状態方程式から得られる特性方程式が4重根を持つように演算して得たパラメータの関係式に基づいて、モデル制御系のパラメータが定められている。
(もっと読む)
能動適応ジャイロスタビライザー制御システム
歳差情報だけに基づいて海洋船舶の運動を安定化するためのジャイロスタビライザー制御システム及び方法。制御システムは自動利得制御(AGC)歳差コントローラ(60)を用いる。システムはジャイロフライホイール(12)に可能な限り大きな歳差−歳差が大きくなるほど、ロール安定化モーメントが大きくなる−を発現させるように、常に漸進的に最小化される利得因子を用いて動作する。この連続利得変化により、海況及び航行状態の変化への適応が与えられる。システムは最大歳差に到達する確度を有効に予測する。このイベントが検出されると、制動歳差トルクを与えるため、利得が急速に高められる。イベントが過ぎてしまうと、システムは再び利得を漸進的に低下させようとする。 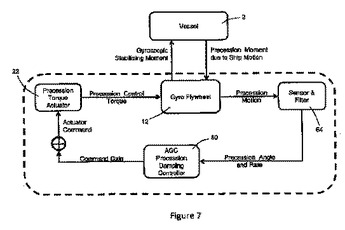 (もっと読む)
(もっと読む)
電動機制御装置
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
適応ノッチフィルタ及びそれを用いた共振抑制装置
【課題】小さい演算負荷で自動的に中心周波数を更新することができる適応ノッチフィルタ及びそれを用いた共振抑制装置を提供する。
【解決手段】適応ノッチフィルタ10は、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するよう構成されており、中心周波数を変更可能であるノッチフィルタ12と、入力信号の周波数と中心周波数の現在値との大小関係に対応する位相特性を有し、制御入力を生成するための信号を入力信号とする位相差フィルタ16と、大小関係に応じて中心周波数修正量の平均値の符号が決定されるように位相差フィルタ16の入力信号及び出力信号を用いて定義された中心周波数修正量を演算し、該中心周波数修正量に基づき中心周波数を更新する修正演算部18と、を備える。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動と基準波との間の位相ズレを低減して、適応フィルタの算出時における制振安定性を向上させるとともに、制御の応答性や制振効果を向上させた制振装置を提供する。
【解決手段】適応フィルタ32fを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて相殺振動Vi4を制振すべき位置に発生させる指令たる相殺信号を生成する。そして、振動Vi3と相殺振動Vi4との相殺誤差として検出された振動と適応フィルタ32fの基準波とに基づいて相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて適応フィルタ32fの基準波の位相を補正する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の周波数を実際の周波数と異なる周波数であると誤認識した場合であっても疑似振動の周波数を制振すべき振動の周波数に合わせて適応制御アルゴリズムの適応性を向上させ、制振性および安定性を向上させた制振装置を提供する。
【解決手段】適応制御アルゴリズムを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、発生した相殺振動Vi4と振動Vi3との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて周波数認識手段31により認識された周波数を位相差が無くなる方向へ補正する周波数補正手段35とを有している。
(もっと読む)
物理量制御装置、物理量制御方法及び物理量制御プログラム
【課題】ザゼンソウ型制御アルゴリズムと、従来の汎用制御アルゴリズムとを融合させ、広範囲な制御対象に対して適応した物理量制御アルゴリズムを提供する。
【解決手段】温度制御装置は、遅延器1、温度センサー3、第1のザゼンソウ型制御部、第2のPID制御部11、エネルギー発生器4,ヒーター5、混合器21を備え、第1のザゼンソウ型制御部は現在温度と前回温度との時間変化勾配をパラメータとし、第2のPID制御部11は現在温度と目標温度との差をパラメータとし、第1のザゼンソウ型制御部と第2のPID制御部11が並列に接続されることを特徴とする。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
システム制御装置及びシステム制御方法
【課題】出力と、出力率フィードバック信号と、参照コマンドとを使用して、適応PIDゲインを動的に調整するための、適応PIDコントローラ及び方法を提供する。
【解決手段】適応並列比例積分微分コントローラは、固定比例積分微分コントローラコマンド、及び固定フィードフォワードコントローラコマンドを含む、固定コントローラ出力と、適応並列PIDコマンド及び適応フィードフォワードコマンドを含む、適応コントローラ出力とを生成する。上記コマンドはすべて参照コマンドから得られる。固定コントローラ出力及び適応コントローラ出力は、加算されて、被制御システムのための制御コマンドを生成する。当該被制御システムは、コントローラに対するフィードバックとして、出力の測定値及び出力の変化率を提供する。
(もっと読む)
システムを制御するための装置および方法
【課題】適応制御は通常、システムパラメータを推定するために、精密なプロセスモデル又はこれらのモデルの近似を必要とする。
【解決手段】適応カスケード比例積分微分コントローラは、固定比例積分微分コントローラコマンド及び固定フィードフォワードコントローラコマンドを含む固定コントローラ出力と、適応カスケードPIDコマンド及び適応フィードフォワードコマンドを含む適応コントローラ出力とを生成し、上記コマンドはすべて参照コマンドから得られる。固定コントローラ出力及び適応コントローラ出力は、加算されて、被制御システムのための制御コマンドを生成する。当該被制御システムは、コントローラに対するフィードバックとして、出力の測定値及び出力の変化率を提供する。
(もっと読む)
車両
【課題】上り段差に到達する直前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させることによって、高速で上り段差に進入した場合でも常に安定した車両動作を維持し、段差がある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の上り段差に接触する前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させる。
(もっと読む)
プロセス制御装置及びプロセス制御システム
【課題】容易にプロセス制御機能を変更することができるプロセス制御装置を得る。
【解決手段】監視装置2の自動選択指令手段2aからの指令信号によりプロセスの動特性を測定し、測定結果に基づき制御命令群メモリ12に記憶された制御命令群の中から所定の制御命令を選択してループタグテーブルメモリ15のFUNCコードメモリエリア15aにコードとして記憶させる自動選択手段20と、FUNCコードメモリエリア15aに記憶された制御命令を参照しながら所定のプログラムを実行することによりプラントのプロセスを制御するCPU16とを備えた。自動選択手段20によりプログラムが参照する制御命令を変更するので、プログラムを変更することなく容易に制御機能を変更できる。
(もっと読む)
1 - 20 / 47
[ Back to top ]