
Fターム[5H115PU25]の内容
車両の電気的な推進・制動 (204,712) | 走行用駆動源 (21,653) | エンジン (11,973) | ハイブリッド型 (11,939) | パラレル方式 (4,108)
Fターム[5H115PU25]に分類される特許
21 - 40 / 4,108
車両用駆動装置
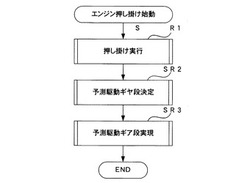
【課題】モータ走行時のエンジン押し掛け始動の際に、要求駆動力に応じた最適な駆動ギヤ段に高応答で変速制御できるようにする。
【解決手段】エンジン押し掛け始動を行うときに、押し掛け始動に使用する変速段として、押し掛け始動を行うときのエンジン回転速度が予め設定された必要回転速度以上となる変速段を選択し、該選択した変速段を使用して前記エンジンの押し掛け始動を行うよう制御する(SR1)。エンジンの押し掛け始動を行うときに、現在の目標駆動力に基づきエンジン始動の所定時間後に予測される予測目標駆動力を求め、該予測目標駆動力に基づき予測駆動ギア段を決定する(SR2)。エンジンの押し掛け始動後のエンジン走行用の変速段として、前記決定した予測駆動ギア段を実現するよう制御する(SR3)。
(もっと読む)
速度予測装置及びプログラム

【課題】過去に走行したことのない道路であっても、速度パターンを精度良く予測することができるようにする。
【解決手段】道路勾配取得部37によって、探索経路の各リンクの道路勾配を取得する。操作状態予測部38によって、道路勾配の状態毎に学習したアクセル操作状態の状態遷移確率と、取得した道路勾配とに基づいて、各リンクのアクセル操作状態の時系列データを予測する。速度パターン生成部40によって、アクセル操作状態毎に学習した道路勾配と加速度との関係と、取得した道路勾配と、予測されたアクセル操作状態の時系列データとに基づいて、各リンクにおける速度の時系列データを予測する。
(もっと読む)
情報提示装置
【課題】 ユーザの都合を予め反映させた移動パターンをユーザに提示することができる情報提示装置を提供すること。
【解決手段】 情報提示装置10の電子制御ユニット11は、ユーザによって入力された行動予定を実現するための移動パターンを複数取得(探索)する。そして、ユニット11は、前記取得(探索)した複数の移動パターンに従って移動するときの所要時間を、ユーザが設定したアワーレートを用いて金額に変換し、この変換した金額とともに移動パターンをユーザに提示する。これにより、ユーザは自身の都合が反映されて提示される移動パターンから任意の移動パターンを容易に選択することができる。さらに、ユニット11は、ユーザによって選択された移動パターンによって発生する対価金額と選択されなかった他の移動パターンによって発生する対価金額との差額を見かけ上の預金額として記憶する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ベルトの寿命の残りが少ない場合に、ベルトを延命させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】ハイブリッドECUは、タイミングベルトの有効張力を検出し(ステップS11)、タイミングベルトの有効張力を積算し(ステップS12)、積算した有効張力積算値が、寿命判定値以上であるか否かを判定し(ステップS13)、有効張力積算値が寿命判定値以上であると判定した場合には、タイミングベルトが寿命に達したと判定し、エンジン回転数がタイミングベルトを共振させる回転数に近いか否かを判定し(ステップS16)、エンジン回転数がタイミングベルトを共振させる回転数に近いと判定した場合には、エンジン回転数を変更する(ステップS17)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
冷却システム
【課題】車両の状態に応じてより適切に複数の電力変換回路を冷却する。
【解決手段】車両の状態に応じてモータMG1を駆動するインバータやモータMG2を駆動するインバータ,昇圧コンバータのいずれかを他に比して優先して冷却する必要があるか否かを判断し(S110〜S150)、この判断に基づいてモータMG1用のインバータを冷却する第1熱交換部の第1バルブ,モータMG2用のインバータを冷却する第2熱交換部の第2バルブ,昇圧コンバータを冷却する第3熱交換部の第3バルブの開閉状態を設定する(S160〜S190)。これにより、車両の状態に応じて発熱が予測される二つのインバータや昇圧コンバータのいずれかの温度上昇に先立ってその冷却に用いる熱交換部における冷却媒体の流量を大きくし、その温度上昇を抑制することができる。
(もっと読む)
電動車両
【課題】絶縁抵抗の低下が生じた部位の特定をより適正に行なう。
【解決手段】走行用モータを駆動するためのインバータとエアコン用インバータとシステムメインリレーとの各状態に応じてモータとエアコンとバッテリとの一部又は全部を含む回路としての電気系について、この電気系の絶縁抵抗の低下を検出し、電気系の絶縁抵抗の低下が検出された以降に、モータエリアとエアコンエリアと電池エリアとの3つの部位のうち絶縁抵抗の低下が生じた部位がいずれであるかが特定されるように、モータエリア特定処理とエアコンエリア特定処理と電池エリア特定処理とを実行する(S240,S280,S320)。こうした特定処理の実行によっても絶縁抵抗の低下が生じた部位が特定不能であるときには、次にシステム起動された以降に、特定不能の原因となった部位に対して絶縁抵抗の低下が生じた部位がいずれであるかが特定されるよう各エリアの特定処理を再び実行する。
(もっと読む)
電動車両の踏み込みダウンシフト制御装置
【課題】電気走行中における自動変速機の踏み込みダウンシフトが、大きな加速応答遅れを生ずることなく良好に行われる踏み込みダウンシフト制御装置を提供する。
【解決手段】t1よりアクセル開度APOを増大させたことで、t2に踏み込みダウンシフトが開始され、この踏み込みダウンシフトが、解放要素(ダイレクトクラッチD/C)から締結要素(ハイ・アンド・ローリバースクラッチH&LR/C)へ掛け替える間、アクセル開度APOの増大に伴ってTmoのように増大するモータトルクtTmを制限する。t2からイナーシャフェーズ開始時t3までの変速初期では、イナーシャフェーズ終了時t4のモータ回転数Nmo2で出力可能な最大モータトルクTmo2からイナーシャフェーズ進行用トルク上限値Tlimit(=Tmo2−Tip)を超えないようモータトルクtTmを制限し、イナーシャフェーズ(t3〜t4)中はモータトルクtTmを制限する。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、内燃機関トルクを利用して、電動機に電気エネルギを供給するためのバッテリを効率良く充電すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。シフト位置が「ニュートラル」にあり、摩擦クラッチが接合状態にあり、アクセル開度が「0」であり、バッテリ残量SOCが閾値TH未満である場合に充電条件が成立する。充電条件が成立すると、EGトルクを利用したバッテリの充電が行われる。具体的には、EGトルクを利用してMGが発電機として駆動され、MGの発電により得られた電気エネルギを利用してバッテリが充電される。
(もっと読む)
車両
【課題】モータジェネレータの回転速度を制限する。
【解決手段】車両は、運転者が操作するスイッチと、スイッチが操作されると停止するエンジンと、モータジェネレータと、エンジン回転速度がゼロから増大するとモータジェネレータの回転速度が減少するようにエンジンの出力軸とモータジェネレータの出力軸とを連結する動力分割装置と、スイッチを操作することによってスイッチエンジンが停止した状態でモータジェネレータの回転速度が増大した場合、エンジン回転速度がゼロから増大するように制御するECUとを備える。
(もっと読む)
車両の異常診断装置および車両の異常診断方法
【課題】後輪駆動用モータに設けられた温度センサの故障検出の精度を高めた車両を提供する。
【解決手段】車両の異常診断装置は、後輪駆動モータMGRの温度を検出する第1の温度センサ30と、第1の温度センサ30によって後輪駆動モータMGRの温度を監視し、後輪駆動モータMGRの制御を行なうHVコントロールコンピュータ8とを備える。HVコントロールコンピュータ8は、車両の状態が第1の温度センサ30の結線異常に対応する仮判定条件を満たす場合には、後輪駆動モータMGRの温度を上昇させ第1の温度センサ30の検出値が対応する変化を示すか否かを確認する確認処理の結果に基づいて結線異常の診断を確定する。
(もっと読む)
制御装置、ハイブリッド自動車および制御方法、並びにプログラム
【課題】電動機による発進に際し、ドライバビリティの違和感を改善させること。
【解決手段】ハイブリッド自動車1が電動機13により発進するのに際し、予め設定されているハイブリッド自動車1のアクセルペダル22の踏み込み量に応じた電動機13の回転速度に基づいて電動機13の回転速度を制御するハイブリッドECU18を構成する。
(もっと読む)
素子寿命判定装置
【課題】電気自動車の収納部に収納されたインバータのスイッチング素子の寿命をより適正に判定する。
【解決手段】試験素子温度Tstmpから環境温度差ΔTest(j)を減ずることにより仕向け地での推定素子温度Tsest(j)を算出する際の環境温度差ΔTest(j)は、複数の環境温度下で所定の走行パターンで走行したときの外気温Tzの変化量に対するルーム内温度Taの変化量の割合を反映する第1感度αaと、試験環境温度Tstmpから仕向け地の最高気温を減じて得られる温度差ΔT(j)との積と、同じく外気温Tzの変化量に対する冷却水温Twの変化量の割合を反映する第2感度αwと、温度差ΔT(j)との積との和として算出される(S140)。これにより、仕向け地での推定地素子温度Tsest(j)をより適正に算出することができる。
(もっと読む)
車両の制御装置
【課題】第2モータジェネレータの出力トルクTMが零付近である状態においてギヤの歯同士が衝突することによる音の発生を未然に防ぐ。
【解決手段】エンジンと、第2モータジェネレータと、エンジンと第2モータジェネレータとを連結するギヤと、エンジンによって駆動されて発電する第1モータジェネレータと、第1モータジェネレータが発電した電力を蓄える蓄電装置とが搭載された車両の制御装置は、蓄電装置の残存容量が予め定められたしきい値より大きいと、エンジンの出力軸回転数が増大するように制御するECUを備える。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】アクセルペダルが踏み込まれた状態でハイブリッド車両が減速走行するときに部品保護やエネルギ効率の改善を図る。
【解決手段】モータ出力パワーPmg1が閾値Pref以上であってモータMG1が比較的高い回転数で回転しながら正のトルクを出力しており(ステップS130)、モータMG2の回転数変化量ΔNm2が閾値ΔNref未満であり(ステップS150)、かつモータMG2の回転数Nm2が閾値Nref未満である場合(ステップS160)、運転者によりアクセルペダルとブレーキペダルとの双方が同時に踏み込まれたのに伴ってモータMG1およびモータMG2の双方が電力を消費して正のトルクを出力するとみなされ、モータMG2に対するトルク指令Tm2*が減少側に補正される(ステップS170)。
(もっと読む)
エンジン始動方法及びエンジン始動装置
【課題】ハイブリッド車両において、エンジンを始動させる際の消費電力量を低減する。
【解決手段】エンジン始動方法は、可変動弁機構(116)を有するエンジン(11)と、エンジンを始動する際にエンジンをクランキングする回転電機(12)と、エンジンが完爆した後も回転電機がエンジンのクランキングを継続する場合に、エンジンの吸入空気量を増量するように可変動弁機構を制御する制御手段(20)と、を備えるハイブリッド車両(1)におけるエンジン始動方法である。該エンジン始動方法は、可変動弁機構による吸入空気量の増量の程度に応じて、回転電機に係るクランキングトルクを減量するトルク減量工程を含む。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、加速側で切り替えレスポンスの向上を達成しながら、コースト減速中の切り替えに伴う捩れショックの発生を防止する。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、遅れ処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、モータトルク差分に対し、アクセル踏み込みによる加速側では、加速要求に適合する加速用変化量制限値によりモータトルク変化の遅れ処理を行なう。一方、アクセル足離しによるコースト減速中のときには、加速用変化量制限値よりも小さい値に設定したコースト用変化量制限値によりモータトルク変化の遅れ処理を行なう。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機の変速種により判別される走行シーンに対応し、走行シーン毎に異なる要求性能を達成すること。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、自動変速機3と、モータトルク変化処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機3の変速種により判別される走行シーンが、駆動力レスポンスが要求される走行シーンであるほど大きな値のトルク変化率を選択し、ショック低減が要求される走行シーンであるほど小さな値のトルク変化率を選択し、モータトルク差分を、選択したトルク変化率で変化する目標モータトルクにより繋ぐ。
(もっと読む)
21 - 40 / 4,108
[ Back to top ]