
Fターム[5H115PU25]の内容
車両の電気的な推進・制動 (204,712) | 走行用駆動源 (21,653) | エンジン (11,973) | ハイブリッド型 (11,939) | パラレル方式 (4,108)
Fターム[5H115PU25]に分類される特許
41 - 60 / 4,108
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両の走行中に内燃機関の始動に伴うショックの発生を抑制すると共に運転停止されていた内燃機関をより適正に始動させる。
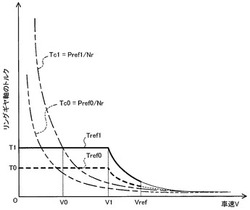
【解決手段】エンジンの運転停止中におけるエンジンの始動判定に際して要求走行パワーと比較される始動判定パワーPref1は、当該始動判定パワーPref1をリングギヤ軸のトルクに換算することにより得られる換算始動判定トルクTc1が車速Vが高いほど小さくなるように設定され、エンジンの始動判定に際して要求トルクと比較される始動判定トルクTref1は、車速Vが間欠禁止車速Vrefよりも低い基準車速V0以下であるときに換算始動判定トルクTc1以下となると共に車速Vが基準車速V0を上回っているときに換算始動判定トルクTc1よりも大きくなるように設定される。
(もっと読む)
電動車両

【課題】 インバータに不具合が生じても意図しない減速が生じることを防止することができる電動車両を提供する。
【解決手段】 本発明のハイブリッド電気自動車の制御装置は、車両に搭載されたバッテリから供給される電力により駆動するモータと、該モータの回転により生じる誘起電圧を前記バッテリの電圧以下となるように抑制制御する誘起電圧制御部と、前記車両に要求される要求駆動トルクに基づいて前記モータの回転数を制御するモータ回転数制御部と、前記要求駆動トルクと前記モータの回転数とから車両を走行させる発生駆動トルクを算出する発生駆動トルク算出部とを備える電動車両において、前記モータ回転数制御部は、前記誘起電圧制御部による抑制制御が不可の際に、前記モータに生じる前記誘起電圧が前記バッテリの電圧以下となるような最大回転数を設定して該最大回転数以下となるように前記モータの回転数を制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】EV走行領域を拡大する。
【解決手段】動力源としてエンジン1及びモータ2を備えるハイブリッド車両100の制御装置であって、エンジン1の廃熱を回生動力として回生する廃熱回生装置6と、モータ2のみを動力源として走行するEV走行時に、廃熱回生装置6によって回生した回生動力をエンジン1の出力軸13に伝達する回生動力伝達機構(11,12,663)と、を備える。これにより、EV走行時に廃熱回生装置6によって回生した回生動力によってエンジン1の出力軸を空回しさせておくことができる。そのため、モータ2によるクランキングを行うことなくエンジン1を自立始動させることが可能となり、EV走行中にエンジン再始動のための余力を残しておく必要がない。したがって、モータ2のみによって走行できる領域を増大させることができる。
(もっと読む)
電源システムおよびそれを搭載する車両、ならびに電源システムの制御方法
【課題】蓄電装置からの電力を用いて走行することが可能な車両の電源システムにおいて、不適切な蓄電装置が接続されているか否かを検出することによって、機器の劣化や故障を抑制する。
【解決手段】負荷装置180に電力を供給するための電源システム105は、蓄電装置と、電圧センサ111と、電流センサ112と、ECU300とを備える、ECU300は、検出された電圧および電流に基づいて蓄電装置の内部抵抗値を演算するとともに、演算された内部抵抗値を予め定められた基準値と比較することによって、蓄電装置が、正規の蓄電装置110とは異なる蓄電装置110Aを含んでいるか否かを判定する。
(もっと読む)
車両用駆動装置の制御装置
【課題】ハイブリッド車両用駆動装置の制御装置であって、例えば短距離運転が頻繁に行われたとしても、車両の燃費悪化を抑制することができる制御装置を提供する。
【解決手段】電子制御装置110は、車両走行中において、車両状態が予め定められた長時間駐車状態になることを予測し、その車両状態が長時間駐車状態になる前に所定の制御開始条件が成立した場合には蓄電装置46の充電残量SOCを減らすようにする充電残量減少制御を実行する。そして、前記長時間駐車状態後の走行開始に際してエンジン10の暖機運転を行うと共にエンジン10からの動力で蓄電装置46に充電する。従って、前記長時間駐車状態後におけるエンジン10の暖機運転の際には蓄電装置46に充電余地が生じているので、エンジン10の暖機運転と共に発電することで、エンジン効率ηegを高めるようにエンジン負荷を調節し、車両6の燃費悪化を抑制することができる。
(もっと読む)
建設機械
【課題】HSTモータおよび走行電動モータによって制駆動する建設機械においては、停止状態から急加速を行う場合に、エンジンをアシストするために、蓄電装置から発電電動機を介してエンジン軸に伝えられた出力が、HSTポンプへの動力として吸収されてしまい、エンジンの加速が遅れる可能性があった。また、蓄電装置からの出力は、発電機やHSTポンプ等を介した後に走行動力として得られるため、駆動効率が低下するという課題があった。
【解決手段】本発明の建設機械は、エンジンをアシストする発電電動機が電動機動作を行う場合に出力されるアシスト要求出力と、HSTモータおよび/または走行電動モータのモータ回転数とに基づいて、走行電動モータを駆動するために出力される電動走行トルク指令およびHSTモータを駆動するために出力されるHST走行トルク指令を算出する制御手段を有することを特徴とする。
(もっと読む)
トルク立上り予測方法およびエンジン始動方法
【課題】油浴状態で配設される油圧式摩擦係合装置の伝達トルクの立上り変化を高い精度で予測できるようにする。
【解決手段】K0クラッチを係合させてエンジンをクランキングする際に、そのK0クラッチの伝達トルクTK0が立ち上がる前の所定の積分時間TiA内に油圧シリンダに加えられるK0クラッチ油圧PK0の積分値Ipk0を算出し、そのK0クラッチ油圧積分値Ipk0および油温Toに基づいて伝達トルクTK0の立上り変化(応答時間tdおよび立上り勾配φ)を予測する。これにより、ピストンの動作遅れや油膜圧の存在に拘らず伝達トルクTK0の立上り変化を高い精度で予測でき、その伝達トルクTK0の立上り変化に伴う駆動力変動をモータジェネレータによって適切に抑制することができる。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
インバータの制御装置及びインバータの制御方法並びに自動車
【課題】複数のインバータをキャリア周波数拡散制御する場合に、キャリア周波数の重なりによって生成される合成音による騒音レベルが大きくなるのを抑制する。
【解決手段】通常用いる周波数fset11,fset21を拡散周波数fspr1,fspr2としたときにキャリア周波数範囲fext1,fext2の重なりの程度が所定範囲以上のときには、拡散周波数fspr1,fspr2として周波数fset11,fset21の2倍の周波数fset12,fset22を用いて実行用キャリア周波数f1*,f2*を設定し(S140)、この実行用キャリア周波数f1*,f2*の変調波を用いたパルス幅変調制御によってインバータのスイッチング素子をオンオフ制御する。これにより、電磁音の合成音が生成されても、合成音の騒音レベルを小さくして、騒音レベルが大きくなるのを抑制することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の車速制限制御時において、より適切にエンジン運転状態を制御する。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行速度を、ステアリングスイッチ28で設定されたリミッタ車速以下で維持するように自動調整する制御であるASL制御を行っているときに、アクセルペダル33の操作に応じたドライバ要求トルクと、車速制限時の駆動トルクである車速リミッタトルクとのセレクトローによって決定される目標駆動トルクから逆算して求められる擬似アクセル開度VAPOに基づき、エンジン1を始動するか又は停止するかのいずれかの判定を行う。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電気システム内部での過電圧等の電圧異常の発生を防止することによって走行距離を確保することである。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、MG1およびMG2のトルク上下限範囲に基づいて、MG1およびMG2の出力トルクによって発生できる電力線54の電力変化量の上下限範囲を設定するとともに、電力線54の電圧VHを電圧指令値に近付けるために必要な前記電力変化量の指令値を算出する。HVECU70は、さらに、指令値と上下限範囲との比較に基づいて、MG1およびMG2の出力トルクによる電力制御の可否を判定する。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】 目標トルクをゼロ相当にしたときに安定した走行状態を達成可能な車両の制御装置を提供すること。
【解決手段】 エンジンとモータジェネレータとからなる動力源のトルク制御により目標トルクを発生させるときに、目標トルクをゼロ相当とする要求が出力されたときは、モータジェネレータをトルク制御から回転数制御に切り換え、かつ、該回転数制御における目標回転数を駆動輪回転数相当値とすることとした。
(もっと読む)
自動車
【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
電気システム並びに電動車両及びハイブリッド自動車
【課題】電気駆動車両に適用してモータの出力増大、加速性能の向上、運動エネルギーの回収率向上、走行エネルギーの低減を図るものである。
【解決手段】入力端子の一方と出力端子の一方とを共通端子とした出力電圧反転形電流双方向昇降圧チョッパ8の前記共通端子を直流電源1の一方の端子に、前記チョッパの他方の入力端子を前記直流電源の他方の端子に接続するとともに、前記直流電源の前記他方の端子と前記チョッパの出力端子の前記他方の端子との間に負荷を接続し、前記チョッパを制御して前記負荷の電圧を前記直流電源の電圧以上にできるようにした。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
車両の制御装置
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
DC/DCコンバータ用制御装置
【課題】充電電流を直接検出することなく、主バッテリの消費電力を抑えることのできるDC/DCコンバータ用制御装置を提供する。
【解決手段】DC/DCコンバータ14から出力される出力電圧Voutと出力電流Ioutは、DC/DCコンバータ用制御装置20が制御情報として制御に用いている情報であり、配線抵抗Rw1を流れる出力電流をIout、配線抵抗Rw2を流れる電流を充放電電流Ibatである。DC/DCコンバータ用制御装置20は、補機バッテリ17の端子電圧Vsenseを測定し、Vout−Vsense(差分電圧)から、配線抵抗Rw1に出力電流を乗じた電圧値を減じ、さらに、得られた電圧値を配線抵抗Rw2にて除することで充放電電流Ibatを算出し、Ibatに基づいて補機バッテリの充電を制御することで主バッテリの消費電力を抑える。
(もっと読む)
41 - 60 / 4,108
[ Back to top ]