
Fターム[5H115PV10]の内容
車両の電気的な推進・制動 (204,712) | 電力変換装置 (10,087) | 電力変換回路 (8,502) | 直流−交流変換器(インバータ) (6,036) | 複数のもの (958)
Fターム[5H115PV10]に分類される特許
81 - 100 / 958
ハイブリッド車両回路システム
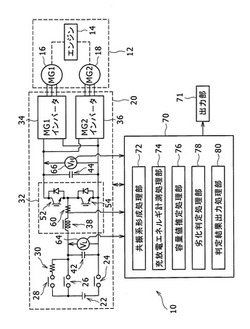
【課題】ハイブリッド車両回路システムにおいて、車両搭載用回路の状態で、その回路に含まれる容量素子の容量値を計測することである。
【解決手段】ハイブリッド車両回路システム10は、スイッチ素子とインダクタンス素子と容量素子とを含む車両搭載用回路として電源回路20を備える。そして、例えば、電源回路20に含まれるスイッチング素子52をオフ状態のままとしてスイッチング素子54をオフからオンとして、インダクタンス素子であるリアクトル38と、容量素子である平滑コンデンサ42とでLC共振系を形成させる。その共振系によって平滑コンデンサ42における充放電エネルギを計測し、その計測に基いて共振時定数を求め、LCを含む共振時定数の式にリアクトル38のインダクタンス値Lを代入して平滑コンデンサ42容量値Cを推定する。
(もっと読む)
ハイブリッド車両

【課題】本発明は、蓄電手段の状態に応じて動作中のエンジンを停止可能な車速を設定し、エンジンを停止する過程において蓄電手段からの過剰な電力の放出を防止し、蓄電手段の劣化を抑制し得るハイブリッド車両を実現することを目的としている。
【解決手段】このため、エンジンとモータジェネレータとから発生する動力を、動力伝達機構を介して、駆動軸に出力するハイブリッド車両において、モータジェネレータと電力のやり取りが可能な蓄電手段を備え、車両速度を検出する車両速度検出手段を備え、エンジンを作動した状態で、車両速度検出手段により検出された車速が、蓄電手段の値に応じて設定されるエンジン停止許可速度より大きい時には、エンジンの停止制御を禁止する。
(もっと読む)
電気車制御装置
【課題】 インバータ起動の制御時に発生する誘導障害やトルクショックを抑制する電気車制御装置を提供することを達成する。
【解決手段】 q軸電流に対するフィードバック制御を抑制した状態で、任意の電圧パルス“VdP”を誘導電動機に印加することで、q軸電流“Iq”を発生させる。発生したq軸電流“Iq”から周波数成分を抽出し、その周波数成分を高周波側から低周波側にかけて振幅値の探索を行う。高周波側から低周波側にかけてある所定の差を有する凸部、凸部の頂点である凸部振幅値及びその周波数を抽出し、また最も高い振幅値である振幅最高値及びその周波数を抽出する。凸部振幅値及びその周波数、最高振幅値及びその周波数からインバータ周波数を推定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ツインクラッチで吸収されるエネルギーを少なくして、ツインクラッチの耐摩耗性や耐熱性を向上できるハイブリッド車両の制御装置を提供する。
【解決手段】噛み合い式クラッチS1〜S4によるプリシフトを実施する際に、最外駆動軸15の回転数を上昇させるために必要なエネルギーを、切り替えられる第1クラッチCL1の容量制御によってエンジン側から得ると共に、それによって発生した駆動力損失分をスタータジェネレータSGを駆動することでプリシフトトルクとして補填するハイブリッド車両の制御装置であって、プリシフト完了後にイナーシャ相に移行して、前記第2クラッチCL2のクラッチ容量を減少させつつエンジンEによりスタータジェネレータSGで発電を行い、またはバッテリ7によりスタータジェネレータSGを駆動してエンジンEを駆動補助することでエンジン回転数を次段目標回転数に近づける。
(もっと読む)
ハイブリッド自動車
【課題】アクセルオフ時に運転者が違和感を覚えるのを抑制する。
【解決手段】アクセルオフされたときには、車速Vが高くなるほど受入可能回生電力Winmaxを大きく設定し、バッテリの入力制限Winと受入可能回生電力Winmaxとのうち絶対値が小さいほうの電力を実行用回生電力Winfとして設定して、エンジンにおける燃料噴射制御を停止して二つのモータにより駆動軸に出力されるトルクの総和が要求トルクとなると共に二つのモータにより充放電される電力の総和が実行用回生電力Winfとなるよう二つのモータを制御する。これにより、エンジンの回転数が高くなり過ぎて、運転者が違和感を覚えるのを抑制することができる。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
電気自動車および制動プログラム
【課題】車輪のロックを検出して制動力の制御を行う場合に比較して、制動距離を短くすることができる電気自動車および制動プログラムを提供する。
【解決手段】
前輪側の左右輪2fr,2flと後輪側の左右輪2rr,2rlとを独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、運転者のブレーキ操作量に応じて摩擦ブレーキ機構による制動力および電気モータ3による制動力を共に発揮させ、各車輪2の少なくとも何れかのスリップ率が路面の摩擦係数に応じて設定された第1の所定値を超えたとき、ブレーキ操作量に関わらず電気モータ3による制動力を低減し、その後スリップ率が前記第1の所定値よりも低い第2の所定値以下となったとき、電気モータ3による制動力を増加する制御を行う制御装置10とを備える。
(もっと読む)
車両
【課題】電磁場の共鳴を利用して、車両外部に設けられた送電コイルから電力を受電可能な受電コイルが底面に配置された車両において、送電コイルに受電コイルを簡単に位置あわせすることができる車両を提供する。
【解決手段】電動車両100は、外部に設けられた送電ユニット220から非接触で電力を受電する車両であって、底面102に配置され、電磁場の共鳴により送電ユニット220から電力を受電可能な受電ユニット110、外部を撮像するカメラ120と、カメラ120が撮像した車両の外部を表示する表示部とを備え、受電ユニット110は、車両の前後方向における底面の中央部から撮像装置が設けられた周面側にずれた位置に配置される。
(もっと読む)
車両用制動発生システム
【課題】本発明は、車両用制動発生システムに係り、電動モータ及び電動ブレーキへの電力供給を簡素な構成で実現させつつ、車両に要求される制動トルクを確実に発生させることにある。
【解決手段】車体バネ下に配置され、電力供給により車輪を駆動する駆動トルクを発生すると共に、車輪の回転により回生電力を発生する電動モータと、車体バネ下に配置され、電力供給により車輪を制動する制動トルクを発生する電動ブレーキと、車体バネ上に配置されるバッテリと電動モータとの間で授受される電力が流通する第1電力線と、電動モータから電動ブレーキへ供給される電力が流通する第2電力線と、車両の制動が要求される場合、要求制動トルクを、電動モータの回生に伴う回生制動トルクと、該電動モータの発生する回生電力の全部又は一部の第2電力線を介した供給により電動ブレーキの発生する電気制動トルクと、で発生させる制動トルク制御手段と、を備える。
(もっと読む)
ハイブリッド車両
【課題】ハイブリッド車両で、バッテリの充電可能電力Winが低い場合でもシフトダウンの際にメリハリのある運転感覚を得る。
【解決手段】
エンジン12と、モータジェネレータ16,20と、二次電池40と、エンジン回転数制御部97とを含むハイブリッド車両10であって、エンジン回転数制御部97は、各シフト段における車速に対するエンジンの下限回転数を設定エンジン下限回転数として設定し、車速と運転者の設定したシフト段とに応じてエンジン12の回転数を設定エンジン下限回転数以上となるようにエンジン12の回転数を変化させるエンジン回転数変化手段と、二次電池40への充電可能電力を計算する充電可能電力計算手段と、計算充電可能電力が小さくなるに従って、各シフト段における車速に対する設定エンジン下限回転数を大きくする設定エンジン下限回転数変更手段と、を有する。
(もっと読む)
車両の駐車支援装置およびそれを備える車両
【課題】車両の駐車位置の位置ずれを小さく抑えることができる車両の駐車支援装置およびそれを備える車両を提供する。
【解決手段】車両の駐車支援装置は、カメラ120と、カメラ120から得られる画像で車外の送電ユニット220の位置を認識して送電ユニット220に向けて車両100を誘導するための第1の車両誘導部と、送電ユニット220から非接触状態で電力の受電を行なう受電ユニット110と、受電ユニット110の受電した電力に基づいて車両100を誘導するための第2の車両誘導部とを備える。制御部は、第1の車両誘導部が画像では送電ユニット220の位置を検出できなくなってから車両駆動部に所定距離を超えて車両を移動させても受電ユニット110が送電ユニット220から受電する電力が第1の条件を満たさない場合には、車両100の移動を停止させるための処理を行なう。
(もっと読む)
車両およびその制御方法
【課題】二次電池の充電可能な最大電力が小さくなる低温領域において、二次電池の放電をより適正に制限して二次電池の残容量低下を抑制しつつ走行性能を確保する。
【解決手段】バッテリ50のバッテリ温度Tbが所定温度Tbref以下であると共に運転者によりECOモードが選択されているときに、バッテリ50のバッテリ温度Tbが所定温度Tbref以下であると共に運転者によりECOモードが選択されていないときに比べてバッテリ50の放電に許容される電力である放電許容電力としての制御用出力制限Woutfが小さくなるようにバッテリ50の状態に基づいて制御用出力制限Woutfを設定し(ステップS110,S120およびS240)、制御用出力制限Woutfの範囲内で要求トルクTr*が得られるようにエンジン22とモータMG1およびMG2を制御する(ステップS140〜S230)。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】騒音や振動により運転者や乗員に不快感を与える騒音振動領域の近傍で内燃機関を運転するときに、騒音振動領域の外側で内燃機関を安定して運転するようにする。
【解決手段】実行用動作ラインLdに補正パワーPadjを含む指令パワーP*を適用したときにエンジンがNVライン上で運転されるときには、補正パワーPadjを含まない目標機関パワーPe*を用いて目標回転数Ne*を設定すると共に目標回転数Ne*で指令パワーP*を除して目標トルクTe*を設定し(S200)、エンジンが目標回転数Ne*と目標トルクTe*で運転され且つ要求トルクTr*が駆動軸に出力されるようエンジンとモータMG1,MG2とを制御する(S210〜S270)。これにより、精度よくエンジンを実行用動作ラインLd上で運転し、騒音や振動により運転者や乗員に不快感や違和感を与える領域でエンジンが運転されるのを抑制することができる。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】ハイブリッド車両が走行状態である場合にモータ電流を検出するセンサの検出誤差を精度高く学習する。
【解決手段】ECUは、トルク指令が一定の状態である場合に(S100にてYES)、フィードバック制御を停止するステップ(S102)と、暫定補正値を決定するステップ(S104)と、偏差Δi(n)を算出するステップ(S106)と、今回の偏差Δi(n)が前回の偏差Δi(n−1)よりも大きい場合(S108にてYES)、最終補正値を決定するステップ(S110)と、フィードバック制御を開始するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
シリーズハイブリッド車両の制御装置
【課題】直流バス電圧に対応してバッテリの出力を適切に制御できる制御装置を提供することを目的とする。
【解決手段】バッテリ23の目標出力PBとバッテリ23の充電率SOCに基づいて直流バス8に対する直流バス電圧指令値Vbus*を設定し、バッテリ目標出力PBに達するようにバッテリ23から直流バス8に対する出力を制御する。そして、直流バス8へのバッテリ23からの出力がバッテリ目標出力PBに達すると、直流バス電圧指令値Vbus*にコンバータ21の直流電圧レベルが近づくように発電機2からの電力量を制御する。
(もっと読む)
ハイブリッド自動車の制御装置、ハイブリッド自動車、および制御方法
【課題】電動クーラのための発電に際し、運転者の運転感覚に違和感を与えないようにすること。
【解決手段】エンジン10とHV回転機12とが協働して走行し、HV回転機12に電源を供給するバッテリ14からの電源の供給を受けて動作する電動クーラ22を有し、バッテリ14の充電状態のSOCが所定値未満または所定値以下のときには、電動クーラ22の消費電力を補うための電力をエンジン10の出力によって発電するHV−ECU20において、電動クーラ22が稼働中で、電動クーラ22の消費電力を補うための電力をエンジン10によって発電していないときには、電動クーラ22の消費電力を補うための電力を発電する分のエンジン10の出力をエンジン10に要求されている出力から減ずるようにする。
(もっと読む)
ハイブリッド車両のパワー表示装置
【課題】間欠運転されるエンジンを搭載したハイブリッド車両において、エンジンの始動および停止と合致するように車両の必要パワーを表示する。
【解決手段】走行用動力源としてエンジンおよびモータを搭載したハイブリッド車両において車両走行状態に対応する必要パワーを移動可能な指示部の位置で表示するパワーインジケータ71であって、車両走行パワーPvがエンジン始動閾値Pthestaよりも小さく且つエンジン停止中は境界線88をエンジン始動閾値Pthestaに相当させて発光表示領域86の先端部87の位置をHVエコゾーン内に設定し、車両走行パワーPvがエンジン始動閾値Pthesta以上で且つエンジン運転中は境界線88をエンジン停止閾値Pthestpに相当させて発光表示領域86の先端部87の位置をエコゾーン内に設定する。
(もっと読む)
車載動力発生装置の制御装置
【課題】駆動輪のスリップの発生に起因してエンジン回転速度の目標値(目標回転速度)がその上限値(上限回転速度)を上回る場合、目標回転速度が上限回転速度以下に制限されることによって上限回転速度が急減し、MG1の発電電力の急増によってバッテリ等の信頼性が低下すること。
【解決手段】駆動軸14の実際の回転速度の変化速度が負の値である規定速度を下回るとの条件と、目標回転速度が規定回転速度を上回るとの条件との論理積が真であると判断された場合、MG1の発電電力が急増すると予測する。そして、MG1の発電電力が急増すると予測される期間において、駆動軸14の実際の回転速度に基づき目標回転速度を上限回転速度よりも低回転側に制限する処理を行う。
(もっと読む)
燃料電池車両
【課題】構成に要する費用を削減し、大きさを小型化し、動作効率の低下を防止する。
【解決手段】電位の異なる第1〜第3ラインL1,L2,L3と、主電源の燃料電池スタック11と副電源のバッテリ12とが直列に接続された電池回路10aと、第1DC−DCコンバータ13とを備え、電池回路10aの両端は第1ラインL1と第3ラインL3とに接続され、燃料電池スタック11とバッテリ12との接続点は第2ラインL2に接続され、第1DC−DCコンバータ13の1次側は第2ラインL2と第3ラインL3とに、かつ、2次側は第1ラインL1と第3ラインL3とに接続され、主電源の電流電圧特性と前記副電源の電流電圧特性とは交差し、駆動モータインバータ15は第2ラインL2および第3ラインL3に接続されている。
(もっと読む)
電気自動車
【課題】衝突などの衝撃により二次電池をシステムメインリレーにより遮断した後により適正にシステム起動する。
【解決手段】衝突等によりバッテリが駆動電力系から遮断された後にシステム起動するときには、システムメインリレーの一方だけをオンとすると共に駆動電力系のインバータ,DC/DCコンバータの全てをゲート遮断して絶縁抵抗の低下を検出し(S200〜S220)、絶縁抵抗の低下が検出されないときにはシステムメインリレーをオンとしてインバータやDC/DCコンバータを順にゲート許可して絶縁抵抗の低下を検出すると共に絶縁抵抗の低下が検出された回路だけをゲート遮断し(S250〜S290)、ゲート遮断の機器の駆動を禁止してシステム起動する。これにより、絶縁抵抗の低下が検出されない機器だけを駆動することができる状態としてシステム起動することができる。
(もっと読む)
81 - 100 / 958
[ Back to top ]