
Fターム[5H115RB08]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | 変速機を用いるもの (1,191)
Fターム[5H115RB08]に分類される特許
41 - 60 / 1,191
ハイブリッド電気自動車の変速制御装置
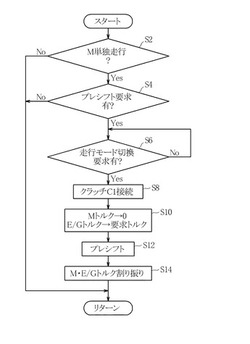
【課題】第2歯車機構のプレシフト要求と走行モードの切換要求とが相前後して発生したとき、これに応じたエンジン吹き上がり制御による燃料消費の増大及び騒音発生を抑制できるハイブリッド電気自動車の変速制御装置を提供する。
【解決手段】電動機単独走行中において偶数歯車機構G2に対するプレシフト要求があったときに(S2,4)、エンジン・電動機併用走行への走行モードの切換要求があるまで待機し、この走行モードの接続要求があると(S6がYes)、インナクラッチC1を接続し、電動機3の駆動力を0にしていくと共にエンジン駆動力を増加させて(S8,10)、電動機3の駆動力の瞬断を防止しつつ偶数歯車機構G2に対するプレシフトを実行し(S12)、同時にエンジン・電動機併用走行への走行モードの切換を完了する(S14)。
(もっと読む)
ハイブリッド電気自動車の停車発電制御装置

【課題】車両停車中にバッテリのSOC低下に応じて停車発電制御を適切に実行でき、もって確実にバッテリのSOCを回復できるハイブリッド電気自動車の停車発電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてバッテリのSOCが充電判定値SOC0以上のときには(S10がNo)、インナクラッチC1及びアウタクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、SOCが充電判定値SOC0未満のときには(S10がYes)、電動機3側のアウタクラッチC2のみを接続状態に切り換え(S16)、停車発電制御により電動機3をジェネレータ作動させてバッテリ5を充電する(S18)。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車の制御装置において、様々な運転状況下で発生する駆動輪のスリップに対して各運転状況に応じた制御を行ない適切にスリップの抑制を行なう。
【解決手段】走行駆動源としてのエンジン1及びモータ3と、エンジン1とモータ3との間に介装されたクラッチ2と、駆動輪8の実スリップ率を算出するスリップ率算出手段60bと、駆動輪8のスリップが検出されたら、クラッチ2の断接状態と、車両の走行状態に基づいて、駆動輪8の目標スリップ率を設定する目標スリップ率設定手段60dと、駆動輪8のスリップが検出されたら、実スリップ率が目標スリップ率になるように走行駆動源の出力トルクを制御する出力トルク制御手段60eとを備える。
(もっと読む)
ハイブリッド電気自動車の充放電制御装置
【課題】車両停車中にゼロトルク制御が行われたときにSOC維持制御を適切に実行でき、もってバッテリのSOCを所定許容範囲内に保持することによりエネルギ効率が悪い強制充電や強制放電の実行を回避できるハイブリッド電気自動車の充放電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてゼロトルク制御を実行していないときには(S10がNo)、クラッチC1及びクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、ゼロトルクを実行中のときには(S10がYes)、電動機3側のクラッチC2のみを接続状態に切り換え(S16)、SOC維持制御を実行してバッテリ5のSOCを所定許容範囲内の中央値である50%近傍の狭い制御幅内で変動させる(S18)。
(もっと読む)
ハイブリッド電気自動車の回生制御装置
【課題】惰行運転時においてエンジン減速モードとモータ減速モードとの間の制動力の格差に起因する減速感の相違を解消した上で、モータ減速モードでは電動機の回生制御により最大限の発電量を実現できるハイブリッド電気自動車の回生制御装置を提供する。
【解決手段】モータ減速モードによる車両の蛇行運転時において、エンジンと電動機との間のクラッチを切断して、電動機の回生トルクを最大トルクライン上で制御することにより車両の減速エネルギの全てを回生発電に利用すると共に、最大トルクライン上におけるエンジンブレーキ近傍の回生トルクが得られる電動機の回転域でシフトダウンを実行することにより、エンジン減速モードと同様に減速感を実現する。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】モータ・ジェネレータと駆動輪との間の動力伝達経路に設けられたクラッチの解放時に消費されるエネルギを低減することが可能なハイブリッド車両の駆動装置を提供する。
【解決手段】キャリアCaに内燃機関11が、サンギヤSuに第1MG12が、リングギヤRiに出力部15がそれぞれ連結された遊星歯車機構22と、第1MG12を制動可能なブレーキ23と、出力部15にクラッチ29を介して連結された第2MG13とを備えたハイブリッド車両1の駆動装置10Aにおいて、ブレーキ23のスリーブ26及びクラッチスリーブ32と連結されたフォーク34を有し、スリーブ26が第1MG12をロックする制動位置に移動するとともにクラッチスリーブ32が第2MG13と連結された第1回転部材30のみと係合する解放位置に移動する位置にフォーク34を駆動可能なアクチュエータ33を備えている。
(もっと読む)
ハイブリッド自動車
【課題】駆動軸の回転数に急変が生じるものとしても、二次電池が過大な電力により充放電するのを抑制する。
【解決手段】低μ路の路面上を走行するなどアクセルペダルの踏み込みにより駆動輪にスリップが生じその後アクセルペダルの踏み込みを維持しながらブレーキペダルの踏み込みによりスリップしている駆動輪をグリップさせた両踏みグリップ状態を判定し、両踏みグリップ状態でないときには要求パワーPeをエンジンから効率良く出力するための目標運転ポイントでエンジンを運転すると共に要求トルクを駆動軸に出力するために設定されたモータMG1のトルク指令Tm1*を実行トルクT1*に設定してモータMG1を駆動制御し、両踏みグリップ状態であるときには実行トルクT1*に値0を設定することによりモータMG1のトルクを制限する。
(もっと読む)
車両の駆動力制御装置
【課題】 アップシフト時の変速ショックを抑制すると共に、イナーシャトルクを有効に利用してエネルギー効率を向上できる車両の駆動力制御装置を提供する。
【解決手段】 車両は、エンジンENG、電動機MG、二次電池1、及び検知手段21cを有する駆動力制御装置21を備える。駆動力制御装置21は、アップシフト時のイナーシャ相中に、エンジンENGのイナーシャトルクが駆動輪に伝達されることを阻止するように、検知手段21cで検知されたイナーシャトルクに基づいて電動機MGで発電させて二次電池1に充電する回生を行なうか、又は電動機MGの駆動力を減少させる。
(もっと読む)
電動機のステータコアの取付方法
【課題】ステータコアをコアホルダの内周に無理なく装着でき、かつコアホルダあるいはステータコアの熱変形等によっても、コアホルダに対するステータコアの軸方向移動を規制することができる電動機のステータコアの取付方法を提供する。
【解決手段】コアホルダ44の内周に、電動機のステータコア41を取付ける取付方法は、コアホルダの円筒部44aに形成された凹部37内にステータコアの外周部を係合する工程を含む。凹部は第1壁37aと第2壁37bと底部37cとにより区画され、常温における第1壁と第2壁との間の距離は、ステータコアの外周部が凹部内に嵌合するように設定されている。
(もっと読む)
車両のモータ制御装置
【課題】交流モータを駆動する3相電圧型のインバータの1つのスイッチング素子の短絡故障が発生した場合でも、交流モータのトルクを制御できるようにする。
【解決手段】インバータ19の各相のスイッチング素子35〜40のうちの1つのスイッチング素子の短絡故障が発生したときに、短絡故障の発生時に使用可能な有効電圧ベクトルに対応する電気角区間(2相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のスイッチング素子のオン/オフを制御する2相変調で電圧制御して交流モータ12のトルクを制御するようにインバータ19を制御し、2相変調可能な電気角区間以外の電気角区間(1相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のうちのいずれか1相のスイッチング素子のオン/オフを制御する1相変調で電圧制御するようにインバータ19を制御する「2相及び1相変調制御」を実行する。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードとHEV走行モードが遷移する際の駆動トルクの段差を低減可能なハイブリッド車両の制御装置の提供を図る。
【解決手段】エンジンコントローラ11、モータコントローラ12、第1クラッチ2,第2クラッチ4を統合コントローラ15で作動制御して、EV走行モードとHEV走行モードとWSC走行モードを現出する。WSC走行モードの目標駆動トルクを、HEV走行モードの目標駆動トルクに対して、これら走行モードの切り換えによって生じるオフセットトルク分減算して設定することによって、モード遷移時の駆動トルクの段差が低減される。
(もっと読む)
車両用駆動装置
【課題】第1駆動部および第2駆動部を有する4軸式の車両用駆動装置において、第2駆動部側の減速比を確保しながらコンパクトに構成しつつNV性能を向上させる。
【解決手段】第1駆動部12の第1出力歯車Evがアイドル歯車Giと噛み合わされているため、第1出力歯車Evの径寸法の設定や各軸配置の自由度を確保しつつ、ダンパ装置Tlの径寸法を大きくしてNV性能やトルクリミッタのトルク容量を確保することが容易になる。第2駆動部14側については、一対の第1減速歯車Mn1および第2減速歯車Mn2を有するカウンタ軸18が設けられるため、減速比の設定の自由度が高くて十分な減速比を容易に確保できる。また、エンジンE/G側の第1減速歯車Mn1は車両幅方向においてダンパ装置Tlとラップする位置で第2出力歯車Mvと噛み合わされているため、装置を全体としてコンパクトに構成できる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジントルクの反力を正確に把握できない場合であっても、乗員に違和感を生じさせることなく、変速モードの切り替えが可能なハイブリッド車両の制御装置を提供する。
【解決手段】回転要素は、エンジンのトルクにより回転する。ロック機構は、回転要素を回転不能なロック状態と、回転可能な非ロック状態との間で切り替え可能であって、回転方向にガタを有する。回転電機は、固定子の回転磁界により回転子を回転駆動させて回転要素にトルクを付与する。切り替え手段は、第1の伝達制御手段による制御から第2の伝達制御手段による制御へ切り替える際、回転電機の回転数が変化したときに、回転電機の制御モードを回転磁界制御から固定磁界制御に切り替える。
(もっと読む)
電動車両
【課題】 車両の要求電気負荷やバッテリの充電状態に拘わらず回生電力を有効に回収する。
【解決手段】 車両減速検出装置13により車両1の減速が検出された際に、車両1の受入れ可能電力に応じてエンジン2に対するクラッチ16の接続を制御し、受入れ可能電力に応じて慣性発電機15の駆動を選択し、無駄なく慣性発電機15を運用して慣性発電機15による回生可能な電力を車両1の受入れ可能電力に応じて有効に回収する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】前輪と後輪とを別々のモータで駆動する構成においてモータの発熱を的確に抑制しつつて走行安定性を確保する上で有利なハイブリッド電気自動車の制御装置を提供する。
【解決手段】フロントモータ18、リアモータ20のうち、一方のモータに分配される駆動トルクTrq1が一方のモータの基準トルクを超過したと判定された場合、他方のモータで駆動される車輪にスリップの発生が否と判定されたときに、一方のモータに分配される駆動トルクTrq1を基準トルクより低減させると共に他方のモータに分配される駆動トルクTrq2を増大させて要求トルクを満足させる。他方のモータで駆動される車輪でのスリップの発生が有と判定され、かつ、エンジンにより駆動される車輪と一方のモータにより駆動される車輪とが同じ車輪である際に、駆動トルクTrq2の増大を禁止して、エンジンに分配される駆動トルクを増大させて要求トルクを満足させる。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両用駆動装置
【課題】係合装置の作動油圧室へ適切に油を供給することができると共に、回転電機のロータ部材を適切に回転可能に支持することができ、更に軸長を短縮して装置全体を小型化することができる車両用駆動装置を実現する。
【解決手段】内燃機関に駆動連結される入力部材Iと、車輪に駆動連結される出力部材と、回転電機MGと、流体継手と、係合装置C1と、これらを収容するケース3と、を備えた車両用駆動装置。ケース3は、係合装置C1に対して内燃機関側を径方向に延びる支持壁5と、当該支持壁5から係合装置C1側に向かって突出する筒状突出部11と、を有する。係合装置C1は、係合部材33と、押圧部材34と、作動油圧室H1と、を備える。回転電機MGのロータRoが支持軸受71により筒状突出部11に支持されると共に、筒状突出部11に作動油圧室H1に油を供給する作動供給油路L1が形成されている。
(もっと読む)
ハイブリッド自動車
【課題】電動機の駆動回路などの電圧を適正に保持して装置の保護を図ると共に動力性能を発揮させる。
【解決手段】モータMG1によりエンジンをクランキングする際には、モータMG2の回転数Nm2が昇圧回路にLC共振を生じさせる閾値Nref以下のときには、昇圧上限値Vlimに低電圧Vloを設定し(S590)、モータMG2の回転数Nm2が閾値Nrefよりも大きいときには、昇圧上限値Vlimに高電圧Vhiを設定し(S600)、インバータ必要電圧Vinv*と昇圧上限値Vlimとのうち小さい方を昇圧回路の電圧指令VH*に設定する(S610)。これにより、エンジン22のクランキング中に昇圧回路のLC共振によって高電圧系のコンデンサに大きな電圧変動が生じるものとしても、耐圧を超える過大な電圧が作用するのを抑制することができると共に電圧の過剰な制限を抑制して走行性能を発揮させることができる。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 クラッチをスリップ制御すると共に、クラッチのモータ側回転数がクラッチの駆動輪側回転数よりも所定量高い回転数となるようにモータを回転数制御するモータ回転数制御走行モードと、クラッチをスリップ制御すると共に、前記クラッチのモータ側回転数が前記クラッチの駆動輪側回転数よりも所定量高い回転数となるようにエンジンを回転数制御するエンジン回転数制御走行モードと、クラッチをスリップ制御しているときに車両停止状態と判定されたときは、指令油圧を低下させる車両停止時伝達トルク容量補正手段と、モータ回転数制御走行モードのときは、車両停止時伝達トルク容量補正手段による指令油圧の低下を許可し、エンジン回転数制御走行モードのときは、前記車両停止時伝達トルク容量補正手段による指令油圧の低下を禁止する補正許可・禁止判断手段と、を備えた。
(もっと読む)
41 - 60 / 1,191
[ Back to top ]