
Fターム[5H115SE04]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | 電気機械 (3,767) | 発電機、電動機兼用のもの (1,643)
Fターム[5H115SE04]に分類される特許
21 - 40 / 1,643
トルク立上り予測方法およびエンジン始動方法
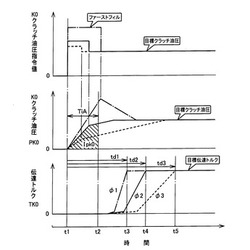
【課題】油浴状態で配設される油圧式摩擦係合装置の伝達トルクの立上り変化を高い精度で予測できるようにする。
【解決手段】K0クラッチを係合させてエンジンをクランキングする際に、そのK0クラッチの伝達トルクTK0が立ち上がる前の所定の積分時間TiA内に油圧シリンダに加えられるK0クラッチ油圧PK0の積分値Ipk0を算出し、そのK0クラッチ油圧積分値Ipk0および油温Toに基づいて伝達トルクTK0の立上り変化(応答時間tdおよび立上り勾配φ)を予測する。これにより、ピストンの動作遅れや油膜圧の存在に拘らず伝達トルクTK0の立上り変化を高い精度で予測でき、その伝達トルクTK0の立上り変化に伴う駆動力変動をモータジェネレータによって適切に抑制することができる。
(もっと読む)
ハイブリッド車両の制御装置

【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
車両の制御装置
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
電動車両
【課題】 インバータに不具合が生じても意図しない減速が生じることを防止することができる電動車両を提供する。
【解決手段】 本発明のハイブリッド電気自動車の制御装置は、車両に搭載されたバッテリから供給される電力により駆動するモータと、該モータの回転により生じる誘起電圧を前記バッテリの電圧以下となるように抑制制御する誘起電圧制御部と、前記車両に要求される要求駆動トルクに基づいて前記モータの回転数を制御するモータ回転数制御部と、前記要求駆動トルクと前記モータの回転数とから車両を走行させる発生駆動トルクを算出する発生駆動トルク算出部とを備える電動車両において、前記モータ回転数制御部は、前記誘起電圧制御部による抑制制御が不可の際に、前記モータに生じる前記誘起電圧が前記バッテリの電圧以下となるような最大回転数を設定して該最大回転数以下となるように前記モータの回転数を制御する。
(もっと読む)
ハイブリッド型ロータリ除雪車
【課題】必要な出力を得ることが可能で、かつ、大型化及びコスト上昇を抑制できるハイブリッド型ロータリ除雪車を提供する。
【解決手段】ハイブリッド・システム10のエンジン1は発電機2の動力源としてのみ使用し、走行及び除雪作業の全動力を電動モータ5の出力だけでまかなう。パワーの必要なときに、電動モータ5に供給する電流を通常(定格)よりも大きくすることで定格出力55kWを最大200%(110kW)まで拡大する。電動モータ5,発電機2,バッテリー6の温度を監視しながら電動モータ5の過負荷運転を間欠的に行い、擬似的に高負荷での運転時間を延長する。これにより、要求出力の半分程度の定格モータを使用することが可能となる。
(もっと読む)
車両およびその制御方法
【課題】ノーマルモードおよびパワーモードのいずれかを運転者が選択可能に構成された車両において、運転者の意図しない駆動力が発生するのを抑制する。
【解決手段】車両は、第1の走行モードと、同一アクセル操作量に対する車両駆動力が第1の走行モードよりも大きい第2の走行モードとのいずれかを運転者により選択可能に構成される。車両は、運転者からの第2の走行モードへの切換え要求を検知するための検知手段と、切換え要求が検知された場合に、第1の走行モード時と比較して車両駆動力を増大させることにより、車両を第2の走行モードへ切換えるための切換え手段と、切換え要求が検知された場合に、車輪のロック状態を検出するためのロック検出手段と、車輪のロック状態が検出されたときには、切換え手段による第2の走行モードへの切換えを禁止するための禁止手段とを備える。
(もっと読む)
ハイブリッド自動車
【課題】こもり音の発生を回避しつつ、運転者や乗員に違和感を与えるのを抑制する。
【解決手段】車速Vが閾値Vref未満の低車速走行時にエンジンを燃費最適動作ラインで運転して車両要求パワーPe*を出力するとエンジンの運転ポイントがこもり音領域内となるときには、エアコン要求パワーPa*より小さな値の補正用パワーPalimをエアコン要求パワーPa*の代わりに用いて車両要求パワーPe*が小さくなるよう再設定(補正)し(S150)、この再設定(補正)した車両要求パワーPe*と燃費最適動作ラインからこもり音領域を回避して得られる実行用動作ラインを用いてエンジンの目標回転数Ne*や目標トルクTe*を設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンやモータMG1,MG2を駆動制御する(S160〜S210)。
(もっと読む)
車両用モータ駆動装置および自動車
【課題】現変速段の2ウェイローラクラッチと次変速段の2ウェイローラクラッチとが二重係合するのを確実に防止することが可能な車両用モータ駆動装置を提供する。
【解決手段】1速摩擦板52aに1速側の係合凸部66aを設け、シフトリング51に係合凹部を設け、この1速側の係合凸部66aと係合凹部は、シフトリング51が1速シフト位置にある状態では互いに係合して1速摩擦板52aに対するシフトリング51の相対回転を規制するように形成し、シフトリング51の内周に突片を設け、出力軸22の外周に切欠きを有する環状突出部を設け、この突片と環状突出部は、突片が環状突出部の切欠きを軸方向に抜け出しかつ突片の位置と環状突出部の切欠きの位置が周方向にずれた状態では、突片が環状突出部に干渉することで、1速シフト位置と2速シフト位置の間でのシフトリング51の軸方向移動を規制するように形成する。
(もっと読む)
車両の制御装置
【課題】蓄電装置を搭載し外部充電が可能な車両において、蓄電装置を構成するセルの電圧を検出する検出部の診断を確実に実行する。
【解決手段】外部充電が可能な車両100のECU300は、蓄電装置110のSOCを演算するためのSOC演算部310と、蓄電装置110内の複数のセルCL1〜CLnの各々についての電圧を検出する検出部DT1〜DTnの自己診断を実行する判定部330と、充電装置200を制御するための充電制御部350とを備える。判定部330は、SOCが基準範囲内であるときに自己診断を実行することができるように設定され、外部充電の実行中にSOCが基準範囲内となった場合に、充電動作を一時的に中断して自己診断を実行する。
(もっと読む)
回生制御装置、ハイブリッド自動車および回生制御方法、並びにプログラム
【課題】電動機の回生トルクを制動力として利用する際のドライバビリティを向上させること。
【解決手段】電動機のみによる走行中の減速時に電動機の回生発電により生じる回生トルクを制動力として利用する際に、予め設定されている目標減速度と回生発電により生じる回生トルクによる実減速度とを比較する減速度比較部32と、電動機が最大の回生トルクを発生しているにも係わらず減速度比較部32の比較結果により実減速度が目標減速度以下となる状態が所定のパターンで生じたとき、今回の減速が終了した後の次回の減速時には、エンジンと電動機とが協働する走行形態とし、エンジンのエンジンブレーキと電動機の回生トルクとを共に制動力として利用する回生制御部30と、を有するハイブリッド自動車を構成する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】運転者の意思等に応じて、NVの抑制と応答性の向上とを調整可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、クラッチを係合してからエンジンを始動させる。そして、制御手段は、騒音又は/及び振動の抑制を優先すべき状態では、エンジン回転数を略0にしてから、クラッチを係合状態にし、エンジンを始動させる。
(もっと読む)
ハイブリッド車両の充電量制御装置
【課題】ハイブリッド車両の走行開始前に空調装置を作動させる場合でも、そのときにエンジンを始動して空調装置の作動用の電気エネルギーを生成する必要性を低下させる。
【解決手段】充電量制御装置は、学習処理において、走行前空調運転を行う場所として登録場所を記録し、当該登録場所で走行前空調運転を行う前に当該登録場所で車両を駐車する時刻を登録時刻Bとして記録する。また、車両が当該登録場所を含むエリアの外から中に入ったことに基づいて、当該登録時刻Bを含む制御対象時間帯を算出し、車両が当該エリアの外から中に入った進入時刻が、当該制御対象時間帯内に入っているか否かを判定し(320、330、340)、入っていると判定した場合、バッテリの充電量が第1範囲内に収まるよう制御されている状態から、バッテリの充電量が第1範囲内よりも上限および下限が大きい第2範囲内に収まるよう制御する(350)。
(もっと読む)
電気車制御装置
【課題】インバータ周波数で発生するトルクリップルに起因する騒音を抑制する。
【解決手段】実施形態に係る制御装置は、電気車の主電動機を駆動する可変電圧可変周波数インバータ(VVVFインバータ)を制御する電気車制御装置であって、運転台からのノッチ指令値及び現在の速度に基づいて、前記インバータの第1電流指令値を演算する電流演算部11と、ノッチ指令0が入力された時、前記第1電流指令値を一定の傾きで減少させ、第2電流指令値を提供する電流制御部12と、前記電流制御部12からの前記第2電流指令値に基づいて、インバータゲート指令を生成するベクトル制御部13と、前記ノッチ指令0が入力された時、前記第1電流指令値又は前記インバータの出力電流実際値に基づいて、前記インバータへのゲート指令をオフするまでの時間を演算するオフ時間演算部16と、前記ノッチ指令0が入力された時から、前記オフ時間演算部にて演算された時間経過後、前記インバータへのゲート指令をオフする時間計測部14とを具備する。
(もっと読む)
ハイブリッド自動車
【課題】リバース走行する際に第1の電動機にロック故障が生じていないことを確かめた上でリバース走行を許可し、第1の電動機にロック故障が生じているときにリバース走行することによって内燃機関が逆回転して破損するのを防止する。
【解決手段】運転者がシフトレバーをリバース走行用のポジション(Rポジション)に変更したときにモータMG1からエンジンをクランキングする方向のトルクを出力し(S110)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至ったときにはモータMG1にロック故障が生じていないと判断してリバース走行を許可し(S160)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至らないときにはモータMG1にロック故障が生じていると判断してリバース走行を禁止する(190)。
(もっと読む)
車両の制御システム
【課題】運転者の感じる減速度の違和感を抑えること。
【解決手段】機械エネルギを動力とするエンジン10、電気エネルギを変換した機械エネルギを動力とするモータ/ジェネレータ20、及びエンジン10と駆動輪WL,WRとの間の動力伝達を断接可能なクラッチ50を備えた車両の制御システムにおいて、減速の際に、エンジン10のエンジンブレーキによる制動力と車両の走行抵抗による制動力の内、車両の減速特性に及ぼす影響の大きい何れか一方の制動力の車速低下に伴う出力特性に相似させてモータ/ジェネレータ20による回生制動力を発生させること。
(もっと読む)
内燃機関装置およびそれを備えたハイブリッド自動車ならびに内燃機関装置の制御方法
【課題】内燃機関の排気を浄化する浄化触媒が未活性であるときに、内燃機関からのトルク出力を確保しつつ、できる限りHC排出量を低減させる。
【解決手段】排気浄化触媒が未活性であると共に目標トルクTe*がトルク閾値Terefよりも大きいときには、圧縮行程中の燃焼噴射が停止され、筒内燃料噴射弁に供給される燃料圧力が圧縮行程中に燃焼室内に燃料を噴射して成層燃焼を実行可能とする基準燃料圧力Pflim以上になるように高圧ポンプが制御され(ステップS170,S180)、ハイブリッド自動車10が走行中であって目標トルクTe*がトルク閾値Teref以下であるときにも、筒内燃料噴射弁に供給される燃料圧力が基準燃料圧力Pflim以上になるように高圧ポンプが制御される(ステップS150,S160)。
(もっと読む)
ハイブリッド車輌の制御装置
【課題】アクセルレスポンスを犠牲にすること無く、加減速時における車輌前後振動や衝撃を効果的に抑制緩和し得るハイブリッド車輌の制御装置を提供する。
【解決手段】加減速時に発生するエンジントルクと、エンジンがエンジンマウントに対し直立姿勢となるエンジントルク(バランストルク)との差分に基づいて目標エンジントルクと目標電動機駆動トルクを算出し、この算出した目標電動機駆動トルクが得られるように電動機を駆動制御し、加減速時におけるエンジンから車軸等の駆動系への入力トルクの急変を抑える。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御中にABS制御が介入したとき、制御干渉の防止と、制御再介入の頻度抑制と、回生エネルギー量確保の実効と、を併せて達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、液圧制動手段であるブレーキ液圧発生装置1と、回生量制御手段であるモータコントローラ8と、回生協調ブレーキ制御手段である統合コントローラ9と、ABS制御手段であるブレーキコントローラ7と、を備える。統合コントローラ9は、回生協調ブレーキ制御中にABS制御が介入したとき、ABS制御介入中は回生制動要求を停止し、ABS制御が非作動状態へ移行すると、前回のABS制御介入時の回生量を超えない値に制限した回生量を今回の回生量リミッタとする制限付き回生制動要求による回生協調ブレーキ制御に復帰するABS介入時回生協調ブレーキ制御を行う(図3)。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関を始動する際に内燃機関の回転により生じるトルク脈動を抑制するために第1電動機から出力する制振トルクを求める際の演算量をより少なくする。
【解決手段】基本脈動トルクTevとモータMG1の回転軸のトルクに換算するためのゲインとを乗ずることによりモータMG1から出力する制振トルクTmvを演算する(S150)。基本脈動トルクTevは、クランク角CAと基本脈動トルクTevとの関係を予め定めた基本脈動トルク設定用マップを用いて設定され(S110)、さらにゲインは、始動開始時クランク角CAstとエンジンの回転数Neと第1ゲインGa1との関係を予め定めた第1ゲイン設定用マップを用いて設定される第1ゲインGa1と(S120)、クランク角CAと第2ゲインGa2との関係を予め定めた第2ゲイン設定用マップを用いて設定される第2ゲインGa2と(S130)の積として演算される(S140)。
(もっと読む)
21 - 40 / 1,643
[ Back to top ]