
Fターム[5H180FF04]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 車載の位置センサを持つもの (4,762)
Fターム[5H180FF04]に分類される特許
141 - 160 / 4,762
車両の走行支援システム及び方法
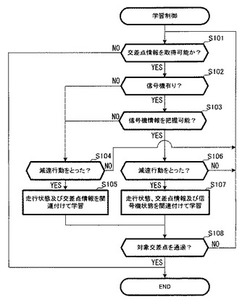
【課題】交差点において安全且つドライバーの意思に沿った車両の走行支援を行う。
【解決手段】走行支援システム(1)は、交差点における車両の走行を支援する。走行状態を検出する走行状態検出手段と、運転操作情報を検出する運転操作情報検出手段と、交差点情報を検出する交差点情報検出手段と、検出された走行状態、運転操作情報及び交差点情報を関連付けて、走行パターンとして記憶する学習手段と、検出された交差点情報が学習済み走行パターンに含まれる交差点情報と同一又は類似である場合に、当該学習済み走行パターンに従って、車両を制御する制御手段とを備える。
(もっと読む)
運転支援表示装置

【課題】運転者にとって、現在車速が適正かどうかを余裕を持って確認でき、且つ、直感的に分かりやすい運転支援表示装置を提供する。
【解決手段】前方道路の形状、現在車速Vcurを逐次取得し、それらから理想走行軌跡32および予測走行軌跡33を逐次更新しつつ、車両走行中、常時、理想走行軌跡32と予測走行軌跡33とを表示器30に表示する。現在車速Vcurが前方のカーブを安全に走行するための理想的な速度である場合や、その理想的な速度をやや超えている程度であり、危険と判断するほどではない場合にも、理想走行軌跡32と予測走行軌跡33を表示器30に表示することになる。そのため、運転者は、運転操作に余裕のあるときに表示を確認することができる。また、現在車速Vcurが適正かどうかを理想走行軌跡と予測走行軌跡とのずれから判断することができるので、直感的に分かりやすい。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】複数の測位手段のうち最適な測位手段の選択を容易にし、測位情報を迅速に反映させることを可能にする、ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、ナビゲーションサーバにおいて、地図データ中の測位範囲情報で示す範囲において端末装置が適切な測位手段を選択制御するための測位制御パラメータを生成し、地図データ、測位制御パラメータ、および、測位範囲情報を端末装置に送信し、端末装置において、受信した地図データを出力し、受信した測位制御パラメータに対応する測位範囲情報で示す範囲内において、測位制御パラメータに基づいて測位手段を切り替える。
(もっと読む)
車両用情報提示装置
【課題】運転者が情報提示に慣れてしまうことを防止し、情報提示を効果的に行うことができる車両用情報提示装置を提供する。
【解決手段】車両用情報提示装置1は、他者の状態を検知する他者状態センシング部10と、自車の状態を検知する自車状態センシング部20と、他者状態センシング部10および自車状態センシング部20の少なくとも一方からの情報に基づき、運転者に対して提示する提示情報を作成する提示情報作成部30と、提示情報を出力する提示情報出力部40と、を備える。提示情報は、自車状態センシング部20からの情報により自車が駐停車状態と判断された場合に、自車が駐停車状態でない場合とは異なる形態で出力される。
(もっと読む)
通行可否情報提供システム及び通行可否情報提供方法
【課題】カーナビゲーションデータフォーマットのフォーマット仕様制限上の問題により、現実世界の規制を正しく表現していないデータを保持していても、また現実世界でどのような複雑な規制表現であっても現実世界通りの規制を考慮した通行可否情報を端末側で取得可能にする。
【解決手段】緯度経度情報に該当する部分の規制データを適用部分と適用除外部分を併せ持つ規制情報データベースを持ち、端末装置からの経路情報の送信を受けて、経路情報中の緯度経度に対応した規制データを前記規制情報データベースから読み出して通行可否を判定し、端末装置に向けて送信する。
(もっと読む)
信号機の点灯状態判断システム及び車両の走行支援システム
【課題】交差点において安全且つドライバーの意思に沿った信号機の点灯状態の判断を行う。
【解決方法】信号機の点灯状態判断システム(1)は、赤色、黄色及び青色の灯器並びに矢灯器を有する信号機の点灯状態を判断し、点灯状態を検出する手段(3、10)と、矢灯器に付随して黄色の灯器が点灯する場合、当該黄色の灯器の点灯タイミングの前後における点灯状態に基づいて、当該黄色の灯器を青色又は赤色の灯器であると判断する手段(10)とを備える。
(もっと読む)
運転評価システム、車載機及び情報処理センター
【課題】より実情に合った運転の評価を行なうことが可能な運転評価システム、車載機及び情報処理センターを提供する。
【解決手段】エコ運転確率密度推定部231及びエコ運転意識事前学習部241が、自車両が運転される状況それぞれに対する自車両のドライバーの運転の評価基準を、運転の評価のたびに再設定する。このため、一律に運転を評価する基準を設定する場合に比べて、運転の評価基準を評価時の実情に合わせて設定することが可能となる。また、エコ運転可能度・熟練度推定部161及びエコ運転意識度推定部171が、エコ運転確率密度推定部231及びエコ運転意識事前学習部241が再設定した評価基準によって、自車両のドライバーの運転を評価する。このため、より実情に合った運転の評価を行なうことが可能となる。
(もっと読む)
通知装置
【課題】ユーザに正確な駐車料金の課金開始時刻を通知できる通知装置を提供する。
【解決手段】自車両位置が駐車場入り口であると、自車両が当該駐車場入り口に位置した時刻を記憶し、この時刻を記憶してから所定時間内に自車両が停車し、かつ自車両の停車位置が駐車場内であると、記憶した時刻を課金開始時刻と推定し、ユーザの携帯機器100に送信する。
(もっと読む)
複数移動体の行動範囲制限システム
【課題】複数の移動体のうち、あらかじめ設定された行動範囲を逸脱した移動体に対して、設定行動範囲内に帰還するように該子機を制限するシステムを提供する。
【解決手段】本発明による行動範囲制限システムは、乗員によって運転可能な、1つ以上の子機と、前記子機の位置を制御する特定機と、前記子機及び特定機の位置情報を供給する位置測定装置とからなる。特定機202Mは、位置測定装置206から特定機及び子機の現在位置情報を取得し、子機202Sの位置が特定機によってあらかじめ設定された制限領域302を逸脱しているか否かを判断し、逸脱している場合、特定機202Mは、子機202Sに対して、前記制限領域302内の目標帰還位置に移動するように指示情報を送信する。子機202Sは、前記指示情報を受信すると、位置情報に基づいて前記目標帰還位置に移動するように移動動作部5を制御する。
(もっと読む)
対象物追跡装置及びプログラム
【課題】対象物が路面に接する接地位置が撮影範囲から外れたり、遮られたりしている場合であっても、自車両の直近まで対象物を追跡して、精度よく対象物の路面上の位置を推定する。
【解決手段】対象物検出部42で、過去の撮像画像から求められた対象物の路面上の位置、及び車両運動情報に基づいて、現在の対象物の路面上での位置を予測して、対応する現在の撮像画像上の位置に検出枠を設定することで対象物を検出し、第1の位置推定部48で、検出枠範囲判定部44で検出枠の下側領域が撮影範囲内であると判定された場合に、検出枠内の画像の足元位置に基づいて、対象物の現在位置を推定し、第2の位置推定部50で、検出サイズ判定部46で検出枠のサイズが予め定めた大きさ以上であると判定された場合に、過去の撮像画像における対象物に対する現在の撮像画像における対象物の拡大率に基づいて、対象物の路面上の現在位置を推定する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】検出された歩数に歩幅データを掛け合わせることで自律航法機能における移動量の計測を行うとともに、任意の移動経路を移動しながらGPSによる測位を間欠的に行って、上記の歩幅データを補正することのできる測位装置、測位方法、およびプログラムを提供する。
【解決手段】自律航法機能の測位が行われる移動経路(T1)の後端地点でGPSによる測位を行い、この後端地点におけるGPSによる測位結果(B)と自律航法機能による測位結果(B1)との差異量を表わすベクトル(Vb)に基づき、自律航法機能により求められた移動経路(T1)の情報を補正し、さらに、自律航法機能により計測された移動経路(T1)の総移動量と、補正された移動経路(T2)の経路長との比較に基づいて、自律航法機能の演算処理で使用する歩幅データの補正を行う。
(もっと読む)
車両用運転状態検出装置、車両用運転状態検出方法および自動車
【課題】運転者の運転状態をより適切に検出すること。
【解決手段】自動車1Aは、車両用運転状態検出装置1を備え、車両走行状態(車間時間THW)の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態(車間時間THW)の分布において歪みを検出した場合、運転者が先急ぎ運転を行っていると判定し、音および表示によって、運転者が先急ぎ運転を行っていることに対する報知を行う。したがって、運転者の運転状態をより適切に検出することができる。
(もっと読む)
車両用運転状態検出装置、車両用運転状態検出方法および自動車
【課題】運転者の運転状態をより適切に検出すること。
【解決手段】自動車1Aは、車両用運転状態検出装置1を備え、車両走行状態(車線内横位置L)の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態(車線内横位置L)の分布において歪みを検出した場合、運転者が漫然運転を行っていると判定し、音および表示によって、運転者が漫然運転を行っていることに対する報知を行う。したがって、運転者の運転状態をより適切に検出することができる。
(もっと読む)
車車間通信装置
【課題】車車間通信装置において、自車両の現在位置を高精度に推定する。
【解決手段】車車間通信装置は、自車両(10)の測位位置を取得する測位位置取得手段(110)と、地図データに基づいて測位位置に対してマップマッチング処理を行うことにより、測位位置を補正して自車両の現在位置を推定する現在位置推定手段(121)と、現在位置の第1の信頼度を決定する信頼度決定手段(122)と、自車両と他車両(20a、20b)との間で情報の送受信を行う通信手段(130)と、複数の他車両における、それぞれの位置精度から求まる第2の信頼度が自車両の第1の信頼度よりも高い場合には、複数の他車両の各々の測位位置と現在位置との差分を複数の他車両の各々の第1の信頼度で重み付けして加算することにより補正量を算出し、該補正量及び自車両の測位位置に基づいて自車両の現在位置を変更する現在位置変更手段(124)とを備える。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム
【課題】出発時における車両の状態を考慮した案内を行うことができる、ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供すること。
【解決手段】ナビゲーション装置50は、一連の走行毎に相互に、車両が走行した各位置における車両の動作を特定する動作情報と、車両が走行した各位置の少なくとも一の位置における車両の車両状態を特定する車両状態情報とを、関連付けて格納する走行情報DB52bと、車両の走行に関する基準位置を取得する基準位置取得部51aと、基準位置における車両の車両状態を取得する車両状態取得部51bと、基準位置取得部51aが取得した基準位置と車両状態取得部51bが取得した車両状態とに対応する一連の走行を特定し、特定された一連の走行に対応する動作情報を走行情報DB52bから取得し、取得した動作情報の表示制御を行う表示制御部51cとを備える。
(もっと読む)
配車処理システム
【課題】各移動局から送信される配車了解信号と位置情報の衝突を回避し、衝突による信号の欠落を防止してタクシーの配車処理を円滑に行うことができる配車処理システムを提供する。
【解決手段】基地局21により移動局11〜14の位置情報を収集すると共に配車情報を移動局11〜14に送信して配車処理する配車処理システムにおいて、基地局21から配車シーケンスの実施中か否かを示す配車シーケンス状態を移動局11〜14に通知し、該移動局11〜14は基地局21から通知された配車シーケンス状態が配車シーケンス中である場合には基地局21への送信スロットのスロット割り当てを配車了解信号送信用と位置情報送信用とに分割して設定する。
(もっと読む)
車両用運転特性検出装置、車両用運転特性検出方法および自動車
【課題】運転者の特性をより高精度に検出すること。
【解決手段】自動車1Aは、車両用運転特性検出装置1を備え、車両走行状態の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態の分布に歪みがあると判定した場合、その分布を基に、運転者の限界値を検出する。このとき検出した運転者の限界値は、そのときの走行状況において、運転者が積極的な運転操作を行い、適正であると考える範囲からの逸脱を回避したことに依拠した値である。したがって、運転者の特性をより高精度に検出することができる。
(もっと読む)
経路探索装置及び移動システム
【課題】安全かつ最短な経路を探索する。
【解決手段】取得部111は、周囲に存在する物体までの位置を示す測域データを取得する。地図データ生成部112は、取得部111により取得された測域データを二次元の座標空間にプロットすることで、2次元の地図データを生成する。特定部113は、地図データにおいて歩行者を示す点群を特定する。投票部114は、投票空間を生成し、生成した投票空間を構成する各格子に、特定部113により特定された歩行者を示す点群を構成する測域データを投票する。安全率算出部115は、投票部114による投票結果にしたがって、各格子の安全率を算出する。探索部116は、安全率が算出された投票空間において、スタート位置を示す格子とゴール位置を示す格子との距離が最短となり、かつ、安全率が最も高くなるような経路を所定のアルゴリズムを用いて探索する。
(もっと読む)
走行支援で利用される情報の信頼度特定装置、方法およびプログラム
【課題】多様な走行支援を行う際に利用される情報の信頼度を特定するための精度情報を効率的に管理し、精度情報を容易に選択する技術の提供。
【解決手段】プログラムで利用される情報の信頼度を特定するための精度情報を複数の要素毎に記録し、実行するプログラムを実行対象プログラムとして特定し、前記実行対象プログラムに対応する要素を前記複数の要素から選択し、選択された要素の前記精度情報に基づいて、前記実行対象プログラムで利用される情報の信頼度を特定する。
(もっと読む)
制御装置、制御方法、及び車両ナビゲーションシステム
【課題】車両ナビゲーション装置を操作している者が、車両の運転者かどうかを適切に判定し、走行中における車両ナビゲーション装置の操作の許否を制御することができる制御装置を提供することにある。
【解決手段】制御装置1は、車両ナビゲーション装置300の制御を行う制御装置であって、車両の運転者の生体情報を検知する脈拍センサ100と、車両ナビゲーション装置300を操作するためのナビゲーション操作部310を操作している者の生体情報を検知する脈拍センサ110と、脈拍センサ100が検知した生体情報と脈拍センサ110が検知した生体情報とが一致するか否かを判定する判定部120と、判定部120による判定の結果に基づいて、ナビゲーション操作部310による車両ナビゲーション装置300の操作の許否を制御する制御部130とを備える。
(もっと読む)
141 - 160 / 4,762
[ Back to top ]