
Fターム[5H180FF05]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置情報を車外から受信するもの (8,868)
Fターム[5H180FF05]に分類される特許
8,261 - 8,280 / 8,868
プローブカー管理システム
【課題】電気自動車のユーザが適切な時期に補給を行うことができるシステムを提供することにある。
【解決手段】携帯電話と、プローブカーに搭載された情報端末装置と、プローブカー管理装置と、が備えられたプローブカー管理システムであって、前記プローブカー管理装置側制御部は、ユーザに知らせる情報又は警報の内容に応じて前記通信部から発信する電話番号を異ならせることを特徴とするプローブカー管理システム。
(もっと読む)
車載用電子装置

【課題】 本発明は、ユーザの指示に応じて道路地図上のランドマークの表示形態を選択的に変更することができる「車載用電子装置」を提供する。
【解決手段】 車載用ナビゲーション装置は、ディスプレイに表示される道路地図上において、ユーザーからの指示に応答して、すべてのランドマークL1、L2、L3、L4、L5、L6を半透過状態で表示させる。これにより、誘導経路P1や道路R1をランドマーク表示に邪魔されず容易に認識することができる。
(もっと読む)
運転支援システム
【課題】燃料消費量の低減を図った給油指示を行う運転支援システムを提供する。
【解決手段】CPU21aが給油所から目的地までの運行によって車両が消費する燃料消費量を推定し、推定された燃料消費量と燃料残量とに基づき給油所での給油量を報知する。また、CPU21aは現在位置から目的地までの経路上にある給油所を検索し、複数検索された場合、現在位置から各給油所までの燃料消費量を推論し、推定した複数の燃料消費量から燃料残量を越えた燃料消費量を除いたもののうち、最大の燃料消費量が推論された給油所を報知する。
(もっと読む)
認証システム及び制御システム
【課題】 通信に依存することなく認証対象となる装置の現在位置を検出することで装置が正常領域内にあるか否かにつき認証するようにした認証システム及びこの認証結果を使用して装置の動作を制御するようにした制御システムを提供する。
【解決手段】 ナビゲーション装置Nは、現在位置検出装置10のGPS信号を受信し、このGPS信号に基づいてユーザが設定した正常領域内にあるか否かの認証を行う。自動車が正常領域内にあるときには、自動車のエンジンの動作を延長し、自動車が正常領域内にないときには、動作期限内であるか判定し、動作期限内でなければ、エンジン制御システムEにエンジン始動不許可信号を出力し、エンジンが始動しないようにする。
(もっと読む)
ナビゲーション装置
【課題】
複数の探索経路が重なっている区間において、どの探索経路が重なっているか短時間に認識することができるナビゲーション装置を提供する。
【解決手段】
3つの探索経路84,85,86は重複区間88,810で重なっている。重複区間88,810は、ステップS700の重複部分描画処理により、探索経路84,85,86の表示色成分による縞模様で表示される。重複区間88,810の縞模様は、目的地から進行方向に向かって縞模様の縞部分が動くように表示される。
(もっと読む)
ナビゲーション装置への特定経路情報の伝送
車両用ナビゲーションシステムは、ユーザーが、規定の目的地まで計算された経路に影響させる入力を提供することを許容する適応ルーティングモジュール(210)を有する。ナビゲーションサーバー(102)により実行されるルート計算モジュール(204)は、出発地点から目的地までの第1経路を計算可能である。ナビゲーションサーバー(102)により実行される適応経路計算(204)は、ユーザーが該第1経路のユーザー修正を入力することを許容可能である。ユーザー修正はユーザーによって入力され、目的地までの第2経路は、該ユーザー修正の関数として計算される。該第2経路はその後、車両用ナビゲーションシステムに伝送される。 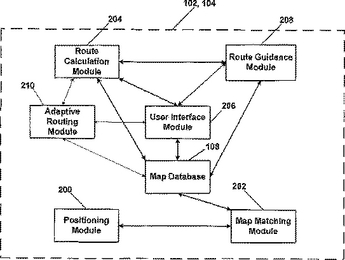 (もっと読む)
(もっと読む)
運転支援装置
【課題】少ない操作で安定した走行状態を実現すること。
【解決手段】情報取得部11がナビゲーション装置2、道路情報収集装置31、カメラ32、速度センサ33、加速度センサ33および車両制御系50の出力から情報を収集し、理想モデル算出部12が自車両の走行の理想モデルを算出する支援処理部13は、車内通知系40を用いて運転者に対する助言を行なうと共に車両制御50を用いて自車両の走行状態が理想モデルに近づくように支援する。
(もっと読む)
危険警報システム
【課題】車両の後方を横切る物体を検出して他車両に危険の存在を通知し、より一層の安全を確保する「危険警報システム」を提供する。
【解決手段】第1の車両1に搭載された第1の危険警報装置9は、カメラ11により撮影した映像を画像処理して車両の後方を横切る物体Pの有無を監視している。そして、車両の後方を横切る物体Pを検出すると、その検出結果に基づいて危険の有無を判定し、通信部を介して周囲の車両に警報信号を発信する。警報信号には、カメラ11で撮影した物体Pの映像と、第1の車両1の位置及び向きを示す情報とが含まれる。第2の車両2に搭載された第2の危険警報装置9は、警報信号を受信すると、自車両が発信元車両に向う道路の対向車線上に位置しているか否かを判定し、自車両が発信元車両に向う道路の対向車線上に位置している場合は音声又は映像により運転者に警報を通知する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】 本発明は、事前に実際の道路状況を予測した的確な運転をドライバーに指示することのできる運転支援方法及び運転支援装置を提供する。
【解決手段】
制御部11は、GPS受信器18にて検出した現在位置に基づいて、情報記憶部14の基準運転情報記憶部14bに記憶した、前方にある予め定めた基準地点とその基準地点に対する基準速度を読み出す。制御部11は読み出した基準地点に対する基準速度と自車の実車速とに基づいて表示開始位置を求める。制御部11は、表示開始位置に来たとき、デッドアップディスプレイ10を介してフロントガラスのコンバイナに、前方を自車と伴走する仮想車両を表示するとともに前方の基準地点における基準速度になるように減速させるための仮想車両の形態中のブレーキランプを点灯表示させる。
(もっと読む)
運転支援装置
【課題】車線変更時における運転操作を支援すること。
【解決手段】ナビゲーション装置2、VICS通信装置32、カメラ33、速度センサ34、加速度センサ35、路車間通信装置36および車両間通信装置37などの出力に基づき、自車両の走行車線を検知するとともに周辺状況を取得し、状況判定部11が車線変更の必要性を判定する。状況判定部11によって車線変更が必要であると判定されたならば、レーンチェンジ支援部12がアドバイス出力部12aによる運転者への情報提供と車両動作支援部12bによる動作制御とを行なって車線変更を支援する。
(もっと読む)
携帯電話を使った位置情報取得方法
【課題】 正確な紙地図は詳細な位置情報を結集したものであり、これらの位置情報を携帯電話へ、手軽に取り込む手段がない。紙地図を携帯電話へ取り込めないのは、紙地図のアナログデータを簡単にデジタルデーターへ変換する手段がなかったためである。
【解決手段】 緯度経度の編集機能及び、GPS機能、カメラ機能を持った携帯電話において、予め緯度経度線をベクターデータ化して電子的に編集可能な状態にする。一方、紙地図は粗緯度経度線を記載する。この紙地図を携帯電話のカメラで撮影し、映し出されたラスター状態の粗緯度経度線に、予め緯度経度線をベクターデータ化し編集可能にした緯度経度線を重ね合わせて地図位置情報を取得する。
(もっと読む)
ナビゲーション装置
【課題】 誤差範囲の設定精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、測位位置の計算に使用された複数のGPS衛星のそれぞれの仰角値の検出と、複数のGPS衛星の重心位置の検出を行うとともに、検出した仰角と重心位置とに基づいて測位位置の誤差範囲を設定する誤差円半径計算部14と、GPS受信機2から出力された測位位置と誤差円半径計算部14によって設定された誤差範囲とを用いて現在位置の計算を行う車両位置計算部20とを備えている。
(もっと読む)
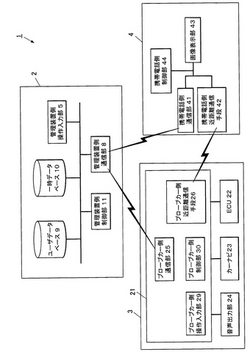
電気自動車管理システム
【課題】電気自動車の充電をスムーズに行い、その適切な運行を確保する。
【解決手段】電気自動車と、風力発電充電スタンドと、から構成され、カーナビゲーション装置と、電気自動車の走行用バッテリーの残存容量を検出する検出部と、風力発電装置の発電の制御、発電電気の管理を行う制御部と、前記電気自動車、前記風力発電装置に関する情報を格納するユーザデータベースと、ユーザデータベースに格納されている情報に基づいて前記電気自動車及び風力発電充電スタンドを制御する制御部とを備え、前記前記電気自動車及び風力発電充電スタンドを制御する制御部は、前記電気自動車、前記風力発電充電スタンドから受信した情報、及び気象情報、前記ユーザデータベースに格納されている情報に基づいて、前記電気自動車の運行のマネジメントを行うことを特徴とする電気自動車管理システム。
(もっと読む)
要約地図作成装置
【課題】複数の経路の要約地図を作成する場合に、適切に道路形状が簡略化されるように事前に各経路のリンクを簡潔化しておくことができる方法を提供する。
【解決手段】(a)に示す互いに近接するリンク71とリンク72に対して、(b)に示すように新たなリンク75を生成することにより、その近接部分を1つのリンクに統合する。このとき(a)に示す元のリンク71とリンク72を、それぞれ(b)に示すように、リンク75の前後で分割する。リンク71はリンク73、75および76に分割され、リンク72はリンク74、75および77に分割される。このようにして、複数のリンクの近接している部分同士を統合して1つのリンクで表すことにより、要約地図を作成する前に各経路のリンクを簡潔化する。
(もっと読む)
車載用ナビゲーション装置
【課題】 現在位置をより高精度に検出することができる車載用ナビゲーション装置を提供すること。
【解決手段】 自車の相対方位変化量を検出する相対方位変化量検出手段と、自車の走行距離を検出する走行距離検出手段と、相対方位変化量と走行距離から自車位置を検出する現在位置演算手段と、検出された位置座標を記憶する描画データ記憶部と、からなる車載用ナビゲーション装置であって、前記現在位置演算手段は、前記相対方位変化量検出手段により検出された相対方位変化量をθ(θ≠0、−π/2≦θ≦π/2)とし、前記走行距離検出手段により検出された走行距離をLとし、直前に検出された位置座標における進行方向をy軸とするx−y座標系において、
x軸方向の移動量を(L/θ)・(cosθ−1)とし、
y軸方向の移動量を(L/θ)・sinθとし、
前記直前に検出された位置座標に前記移動量を逐次加算して現在位置を検出する。
(もっと読む)
プローブカー管理システム
【課題】電気自動車のユーザが適切な時期に補給を行うことができるシステムを提供することにある。
【解決手段】携帯電話と、情報端末装置と、プローブカー管理装置と、を備えるプローブカー管理システムであり、前記プローブカー管理装置側制御部は、前記プローブカー走行用バッテリー又は走行可能距離に関する情報を前記携帯電話に対して送信し、前記携帯電話は受信した情報を前記携帯電話側近距離通信手段により前記プローブカー側近距離通信手段に転送することを特徴とするプローブカー管理システム。
(もっと読む)
要約地図表示装置
【課題】
探索経路のずらす量が小さくても高架道路を通過する探索経路であるか、高架下の道路を通過する探索経路であるか区別できる要約地図表示装置を提供する。
【解決手段】
高架道路を通過する探索経路101と高架下の道路を通過する探索経路102が重なっている場合は、まず探索経路101は矢印103の方向へ探索経路101の線幅の長さの半分の長さを平行移動する。次に、探索経路102は矢印104の方向へ探索経路102の線幅の長さの半分の長さを平行移動する。そして、探索経路102がパイプ105を通過しているように見える態様でパイプ105を表示する。
(もっと読む)
ユーザへの位置情報の提供
本発明はユーザ(100)に位置情報を提供するためのシステムに関し、同システムはユーザが位置情報を利用できるようにするユーザデバイス(110)を有し、このユーザデバイス(110)はユーザによって実質的に物理的遠隔位置(130,140)のほうに向けられて、当該遠隔位置に対応する情報を選択するように構成される。ユーザデバイスは当該デバイスの現在位置(120)及び当該ユーザデバイスが実質的に向けられる方向を特定することによって当該デバイスの遠隔位置(130,140)を特定するように構成されうる。また本発明はユーザに位置情報を提供する方法に関する。 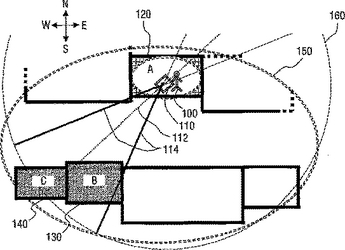 (もっと読む)
(もっと読む)
運転支援装置
【課題】カーブ走行時における運転操作を支援すること。
【解決手段】カーブ検出部11がナビゲーション装置2の出力から自車両のカーブの進入を予測した場合に、カーブデータ取得部12がそのカーブの形状を示す情報を取得する。理想モデル算出部13は、カーブに関する情報、自車両の状態、周辺状況からカーブ走行の理想モデルを算出し、支援処理部1が車内通知系40を用いて運転者に対する助言を行なうと共に車両制御50を用いて自車両の走行状態が理想モデルに近づくように支援する。
(もっと読む)
道路情報提供システム
【課題】道路の走行しにくさの情報、特に実際に走行してみなければ分からない道路の情報を車両から入手し、他の車両に情報提供可能な道路情報提供システムを提供する。
【解決手段】道路情報提供システム1は、車両2とデータセンタ3とより構成され、車両2は、自車両の位置を計測する位置計測装置22と、走行しにくい道路状態を数値として検出する検出装置23と、検出手段23により検出された数値のうち予め設定された閾値以上の数値と車両の位置とをデータセンタに送信する通信装置39と、道路情報を表示する表示装置21とを備え、データセンタ3は、閾値以上の数値を送信した車両2の位置と閾値以上の数値とを対応付けて記憶するデータベース35と、閾値以上の数値に基づいて走行しにくさのレベル分けを行う分析装置33と、位置とレベルとを道路情報として車両に送信する通信装置34とを備える。
(もっと読む)
8,261 - 8,280 / 8,868
[ Back to top ]