
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
401 - 420 / 2,931
情報システム
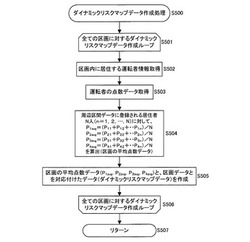
【課題】車両運転者に対して時間変化に伴う状況に基づいたリスクを適切に報知する情報システムを提供する。
【解決手段】情報システムは、車両を運転する運転者の運転適正診断項目に係る点数データを記憶する運転適正診断項目点数データ記憶手段と、運転者が居住する区画データを記憶する居住地データ記憶手段と、前記点数データと、前記区画データとに基づいて、運転者の平均の点数データを算出する平均点数データ算出手段と、車両が走行する道路データと道路周辺の区画データとを記憶する地図データ記憶手段と、運転者の平均の点数データと、前記区画データとを対応づけたリスクマップデータを作成するリスクマップデータ作成手段と、前記リスクマップデータを配信する運転適正診断項目データ配信手段と、を備える。
(もっと読む)
車載用通信装置、車載用通信方法、及び車載用通信プログラム

【課題】簡易な処理によって衝突回避に必要な情報を他車に伝達することができる、車載用通信装置、車載用通信方法、及び車載用通信プログラムを提供すること。
【解決手段】車載用通信装置40は、交差点毎に、車両の走行に関する履歴情報と、電波の周波数を特定する属性情報とを、相互に対応付けて格納する属性DB43cと、交差点毎に自車の走行に関する自車履歴情報を格納する履歴DB43dと、自車が交差点に接近した場合、当該接近した交差点に対応する自車履歴情報を履歴DB43dから取得する履歴情報取得部42aと、履歴情報取得部42aによって取得された自車履歴情報に対応し、且つ接近した交差点に対応付けて格納されている属性情報を、属性DB43cから取得する属性情報取得部42bと、属性情報取得部42bが取得した属性情報に基づいて特定される周波数の電波の出力を行う通信部41とを備える。
(もっと読む)
航海支援装置
【課題】
操船者が着目する各想定時刻における自船、物標の位置関係を最新時点の自船情報等に基づいて算出、表示できるようにする。
【解決手段】
所定の情報取得時刻毎に該時刻における自船等の位置、船速及び船針を含む自船情報を取得し、各想定時刻(位置等の算出時刻)における自船位置等を算出する。その際、表示させたい各想定時刻における自船等の位置の算出は、各算出時刻において、情報取得時刻のうち該算出時刻を基準として最新の情報取得時刻において取得された自船情報に基づいて算出するようにする。
(もっと読む)
操縦支援装置
【課題】 管制官の管制指示に対する操縦者の認識状態に応じた適切な操縦支援を行うことができる操縦支援装置を提供する。
【解決手段】 ECU1における比較判定部15は、管制官の指示内容と、機体の操縦者の復唱内容とを比較し、管制官の内容と操縦者の復唱内容が不一致である場合に、操縦者の復唱内容をカテゴリーに分類する。ここで、操縦者の復唱内容が肯定語である場合に、管制官の指示内容に応じた操縦支援を行う。操縦者の復唱内容が否定語である場合には、管制官から再度の指示の回答待ちを行う。操縦者の復唱内容が要求語である場合には、管制官に新たな要求を行った後、管制官から再度の指示の回答待ちを行う。操縦者の復唱内容が「その他の語」である場合には、警告装置4による警告を行う。
(もっと読む)
車両周辺監視装置
【課題】物体の大きさに関わらず自車と衝突する可能性のある障害物があるか否かの判定を正しく行う事ができ、また、物体の中心が動いた場合でも、物体内の輝度の変化が大きい場合でも正しく判定を行うことができる車両周辺監視装置を得る。
【解決手段】撮影された画像からエッジ抽出により物体を抽出する物体抽出手段200と、該物体抽出手段200により抽出された物体の上下左右端を検出する検出手段201と、該検出手段201により検出された物体の上下左右端と保持している前フレームにおける物体の上下左右端を比較することにより上記物体の上下左右端の移動方向を算出する算出手段206と、該算出手段206により算出された物体の上下左右端の移動方向がそれぞれ上下左右方向に移動している場合に、上記物体を自車と衝突の可能性が高い障害物候補と判定する接近判定手段211とを備えた。
(もっと読む)
情報システム
【課題】車両運転者に対して道路上リスクを考慮に入れた適切な走行ルート提案を行うことができる情報システムを提供する。
【解決手段】本発明の情報システムは、車両を運転する運転者の運転適正診断項目に係るデータを記憶する運転適正診断項目データ記憶手段と、運転者が運転する車両の位置情報を収集する車両位置情報収集手段と、前記車両位置情報収集手段で収集された位置情報と、前記運転適正診断項目データ記憶手段で記憶されている運転適正診断項目に係るデータとを対応づけたリスクマップデータを作成するリスクマップデータ作成手段と、前記リスクマップデータ作成手段で作成されたリスクマップデータを車両に配信する運転適正診断項目データ配信手段と、前記運転適正診断項目データ配信手段によって配信されたリスクマップデータに基づいて車両の走行予定ルートを提案するルート提案手段(ステップS703、704)と、を有することを特徴とする
(もっと読む)
車両制御装置
【課題】緊急地震速報を受信した際の対処法を改善して、車両走行の安全性を向上することを課題とする。
【解決手段】 緊急地震速報を受信する緊急地震速報受信手段102と、緊急地震速報受信手段102で緊急地震速報を受信したことを車室外に通知する周辺車両向け警報手段104と、緊急地震速報受信手段102で緊急地震速報を受信したことを車室内に通知する緊急地震速報伝達手段103とを有する車両制御装置において、緊急地震速報を受信したことを周辺車両向け警報手段104によって車室外に通知した後、緊急地震速報受信手段102で緊急地震速報を受信したことを車室内に通知することを特徴とする。
(もっと読む)
情報システム
【課題】車両運転者に対して時間変化に伴う状況に基づいた道路上リスクを適切に報知する情報システムを提供する。
【解決手段】本発明の情報システムは、車両を運転する運転者の運転適正診断項目に係るデータを記憶する運転適正診断項目データ記憶手段と、運転者が運転する車両の位置情報を収集する車両位置情報収集手段(ステップS201)と、前記車両位置情報収集手段で収集された位置情報と、前記運転適正診断項目データ記憶手段で記憶されている運転適正診断項目に係るデータとを対応づけたリスクマップデータを作成するリスクマップデータ作成手段(ステップS203)と、前記リスクマップデータ作成手段で作成されたリスクマップデータを車両に配信する運転適正診断項目データ配信手段(ステップS204)と、を有することを特徴とする。
(もっと読む)
空港における滑走路誤進入を低減する方法およびシステム
【課題】空港でパイロットに使用される音声通信チャネル上に送信される情報のデータパケットを用いて、空港における滑走路誤進入を最小化または防止するシステムおよび方法を提供する。
【解決手段】情報のデータパケットは、航空機に搭載されたGPS受信機によって提供される航空機の緯度および経度の位置、および、登録番号などの、その航空機のユニークな識別子からなる。そして、その情報のデータパケットは、同一地上周波数上の他の航空機および管制塔に受信され、パイロットおよび管制塔の地上制御装置に提供される、地理的情報が付加されたその空港の地図表示上に表示される。前記情報は、あちらこちらの航空機を調査することによって更新されてもよい。このようにして、空港内で運行中のすべての航空機から受信した情報は、地上制御装置と同様、地上のパイロットが目視可能な空港の電子地図上に表示され得る。
(もっと読む)
車載用通信装置、車載用通信方法、及び車載用通信プログラム
【課題】簡易な処理によって衝突回避に必要な情報を他車に伝達することができる、車載用通信装置、車載用通信方法、及び車載用通信プログラムを提供すること。
【解決手段】車載用通信装置60は、交差点毎に、車両の速度及び加速度を含む車両状態情報と、電波の周波数を特定する属性情報とを、相互に対応付けて格納する属性DB63cと、自車が交差点に接近した場合、当該自車の速度及び加速度を含む自車状態情報を取得する自車状態情報取得部62aと、自車状態情報取得部62aが取得した自車状態情報し、且つ接近した交差点に対応する属性情報を、属性DB63cから取得する属性情報取得部62bと、属性情報取得部62bが取得した属性情報に基づいて特定される周波数の電波の出力を行う通信部61とを備える。
(もっと読む)
接近物体検知システム
【課題】接近物体検知システムにおいて、演算処理の負荷を軽減しつつ、接近してくる移動体を精度よく検出するものとする。
【解決手段】カメラ10で撮影(#1)して得られた画像Pに対して、第1の移動領域検出手段30が、略水平方向へのオプティカルフローだけを検出し(#3)、得られたオプティカルフローに基づいて略水平方向に移動する領域を含む矩形の画像部分Qを設定し(#4)、設定された矩形の画像部分Qに対して、第2の移動領域検出手段40が、鉛直方向(縦方向)に沿った信号値の分布(プロファイル)を求め(#5)、さらに第2の移動領域検出手段40は動的計画法に基づく処理により、時系列手に相前後する2つの画像P,Pの画像部分Q,Qの信号値分布同士を対応させて(#6)拡大率を求め(#7)、接近物体判定手段50が、拡大率に応じて、真に接近してくる物体か否かを判定する。
(もっと読む)
画像処理装置
【課題】撮像画像における路面反射光の影響を好適に抑制可能な画像処理装置を提供する。
【解決手段】同一の路面領域を異なる位置から撮像する複数の撮像装置のうち、一つを基準撮像装置、その他を対象撮像装置として、これら撮像装置から各撮像画像を取得する。この取得した各撮像画像のうち、基準撮像装置による画像を基準画像、対象撮像装置による画像を対象画像として、対象画像における路面領域(対象路面領域)が基準画像における路面領域(基準路面領域)と一致するように各対象画像を視点変換し、その変換後の対象画像と基準画像とを合成する。さらに、合成画像における路面領域(合成路面領域)を抽出し、基準画像のうち基準路面領域を合成路面領域に置換する。このため、路面領域を基準平面として高さ(マイナスの高さ)を有する物体(路面反射光)の輝度が置換画像における画像路面領域内で低減される。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
走行レーン検出装置および走行レーン検出プログラム
【課題】走行レーンを検出する走行レーン検出装置において、精度よく走行レーンを検出することできる技術を提供する。
【解決手段】走行レーン検出システムにおいては、走行レーン認識処理にて、当該車両の走行状態である走行速度および当該車両が走行する道路における環境である横断歩道や走行レーン幅に基づいて、当該車両が走行する道路における道路種別が高速道路か一般道かを判定し(S130)、道路種別に応じて、当該車両が走行する走行レーンの形状の許容範囲に関するパラメータを設定する(S140)。そして、抽出したエッジ成分(エッジ点)のうちのパラメータの設定に合致するエッジ成分を、走行レーンの輪郭の一部を表す輪郭成分として検出し、撮像画像において輪郭成分よりも中央側の領域を走行レーンとして特定する(S150)。
(もっと読む)
車両走行支援制御方法および装置
【課題】
車両の走行中に有している運動エネルギーを最大限に活用することによって車両走行に必要なエネルギーおよび排出ガス量を削減する。
【解決手段】
走行経路中の停止点S0、S1、・・・Sn、Sn+1、・・・及びその停止順序をあらかじめ設定し、設定された停止点Sn およびSn+1 間の車両走行距離距離Dn+1 および前記停止点Sn からの走行距離ΔD から、現時点から次に停止すべき地点Sn+1 までの残距離Dr =(Dn+1−ΔD)を算出し、前記残距離Dr が現時点での走行速度vで惰性走行に移行した場合、次に停止すべき地点Sn+1 に惰性走行で到達可能な距離か否かを判定し、到達不可と判定した場合は現時点まで行ってきた加速走行あるいは定速走行を継続し、その後一定時間あるいは一定走行距離走行後改めて前記惰性走行可否の判定を行う。到達可能と判定した場合は惰性走行に移行して次に停止すべき地点Sn+1まで走行する。
(もっと読む)
車載装置および情報提供システム
【課題】交差点を安全に通過するタイミングをドライバーへ的確に報知すること。
【解決手段】情報提供装置は、インフラセンサから取得した移動体情報に基づいて移動体が交差点内を通過する時間帯を通過時間帯情報として生成し、生成された通過時間帯情報を車載装置へ送信し、車載装置は、情報提供装置から通過時間帯情報を受信し、自車両の走行状態を自車両情報として取得し、受信された通過時間帯情報および取得された自車両情報に基づいて自車両が交差点を通過する際の安全度を算出し、算出された安全度に基づいて仮想的な信号を示す仮想信号の信号色を決定し、決定された信号色を有する仮想信号を報知するように構成する。
(もっと読む)
車両モニタシステム
【課題】後続車両が走行している車線を素早く判断することのできる「車両モニタシステム」を提供することである。
【解決手段】車両の後方を撮影する撮影手段21(22、23)と、該撮影手段にて得られた撮影画像に基づいて後方画像を生成する処理手段10と、車室内に設けられ、前記処理手段にて得られる後方画像を表示する表示手段31(32、33)とを有する車両モニタシステムであって、前記処理手段10は、前記後方画像において車線画像部分を検出する車線検出手段(S4)と、検出された車線画像部分から当該車両が走行している車線に対応した走行車線画像部分を特定する走行車線特定手段(S7)と、前記後方画像において前記走行車線画像部分と他の車線画像部分とを異なる色にて表わす車線描画処理手段(S10)とを有する構成となる。
(もっと読む)
車両用運転支援装置
【課題】自車両を含む車両群全体の燃費の向上を図ることができる車両用運転支援装置の提供。
【解決手段】自車両の位置及び実速度を検出する位置速度検出手段1と、自車両の燃料消費効率が最も高くなる最大燃費速度を記憶する記憶手段2と、車両間で、車両の位置、実速度及び最大燃費速度を含むデータを送受信する通信手段3と、前後に隣接する車両どうしの車間距離が所定距離以下である一連の車両を一つの車両群として設定する車両群設定手段4と、最大燃費速度が実速度より高く、且つ、最大燃費速度と実速度との速度差が最大の優先車両を抽出する優先車両抽出手段5と、優先車両の前方を走行する前方車両に対して、当該優先車両の前方から移動することを指示し、かつ、各車両に対して、各車両の最大燃費速度、又は、各車両の最大燃費速度未満で走行する直前の車両の実速度で走行することを指示する指示手段6とを備えている。
(もっと読む)
車両用の情報提供装置及び情報提供方法
【課題】変化する走行環境に応じた注意喚起情報を提供する。
【解決手段】路側装置400から所定地点を通過する他車両の他車両情報と、道路の地点に関する道路情報とを取得する外部情報取得部10と、所定地点を通過する自車両の自車両情報を取得する自車両情報取得部20と、各他車両の他車両情報と自車両情報とを比較し、所定地点を所定時間内に通過する2以上の車両を含む車群に自車両が属するか否かを判断する車群判断部30と、自車両が車群に属する場合は、自車両の前方を走行する先行他車両又は自車両の後方を走行する後続他車両の他車両情報と道路情報と自車両情報とに基づいて、自車両の運転者が注意するべき対象を抽出する注意対象抽出部40と、抽出された対象に応じた注意喚起情報を運転者に提供する提供部50と、を備える。
(もっと読む)
車載用表示システム及び表示方法
【課題】仮想先行車両像等の表示を任意の奥行き位置に高い位置精度で知覚させる単眼視の車載用表示システム及び表示方法を提供する。
【解決手段】車両の進路前方に関する情報である前方情報を取得する前方情報取得部と、前記車両に搭乗する観視者の片目の位置を検出する位置検出部と、前記前方情報取得部によって取得された前方情報に基づいて、前記車両の幅及び高さの少なくともいずれかに対応した大きさを有する第1仮想画像を、前記進路前方の景色内の対応する位置に生成し、前記生成した前記第1仮想画像を有する映像を含む光束を、前記検出された前記片目の位置に基づいて前記観視者の前記片目に向けて投影する映像投影部と、を備えたことを特徴とする車載用表示システムが提供される。
(もっと読む)
401 - 420 / 2,931
[ Back to top ]