
Fターム[5H180LL07]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音による警報であるもの (2,307)
Fターム[5H180LL07]に分類される特許
241 - 260 / 2,307
交差点警告装置
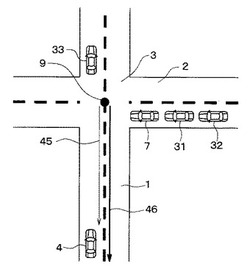
【課題】自車両が交差点から起動距離内に入ったときに警告を行うためのアプリケーションを実行する交差点警告装置において、車両の混雑度に応じて起動距離を適切に制御する。
【解決手段】他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、自車両の周囲の車両7、31、32の混雑度が高いほど、起動距離を長くし、混雑度が低いほど、起動距離を短くする。
(もっと読む)
運転状態判断装置、及びプログラム

【課題】従来技術と比較して、より正確にドライバの運転状態を判断する。
【解決手段】第1の所定時間内において、ドライバの視界24内の所定の遠方領域20に、検出された視線が第2の所定時間以上停留した第1の回数を演算し(108)、第1の所定時間内において、遠方領域20よりドライバの手前側の近傍領域22に、検出された視線が第2の所定時間以上停留した第2の回数を演算し(112)、第1の回数及び第2の回数の一方を基準としたときの他方の値を示す相対値Eを演算し(114)、そして、相対値Eがドライバが運転に適した状態で移動体を運転した場合に求めた相対値E´を含む所定範囲内の値でない場合に、移動体のドライバの状態が運転に適した状態でないと判断する(116)。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
車両用歩行者検出装置
【課題】歩行者の服の柄や皺等形状以外の情報に影響を受けることなく、歩行者を効率的に判定可能な車両用歩行者検出装置を提供する。
【解決手段】距離画像作成手段12は輝度変化に関わる解析不要な情報を除去した距離画像F3を作成し、正規化手段13と判定用セル設定手段15は距離画像F3よりも小範囲の判定用セルS(n,m)を設定する。また、第1距離勾配ベクトル算出手段16と第1ヒストグラム作成手段17は、対象物Oの形状に対応した特定領域としての判定用セルS(n,m)の距離勾配ベクトルVKについて、歩行者検出に必要なヒストグラムデータH1を作成する。このヒストグラムデータH1をヒストグラム基準データH0と比較するため、形状判定に解析不要な情報を除去した状態で歩行者を判定でき、歩行者判定処理の高速化と誤検出防止を図ることができる。
(もっと読む)
衝突安全システム
【課題】ドライバーの状態に応じて適切な車両操作の支援および車両制御の実行を可能とする衝突安全システムを提供する。
【解決手段】車両周囲の障害物を検出する障害物検出手段と、車両と障害物とが衝突する危険性が高いか否かを判定する衝突危険度判定手段と、衝突危険度判定手段によって衝突の危険性が高いと判定された場合に、車両の車室内において警報音を鳴動して衝突の危険性を車両のドライバーに報知する警報手段と、車両のドライバーが混乱しているか否かを判定する混乱判定手段とを備える、衝突安全システムであって、警報手段は、混乱判定手段によってドライバーが混乱していると判定された場合、警報音の音量をドライバーが混乱していないと判定された場合に比べて小さくする音量制御手段を含む、衝突安全システムである。
(もっと読む)
走行支援装置および走行支援方法
【課題】自車両が走行する走路に、物体が飛び出す可能性を適切に算出することができる走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段10と、撮像した画像の情報に基づいて、画像中で移動した物体のエッジ成分を抽出する抽出手段と、画像中の所定領域において、抽出手段により抽出されたエッジ成分に対応する画素が複数連続してなる画素列を構成する各画素のうち、高さ方向において最も下側に位置する画素の位置を最下点位置として検出する最下点位置検出手段と、車両の進行方向に沿って、最下点位置同士を結ぶ直線を、自車両が走行する走路の境界線として検出する境界線検出手段と、を備える走行支援装置において、最下点位置に基づいて、自車両の進行方向の空間と交差する空間である交差空間を検出する交差空間検出手段と、検出された交差空間に基づいて、自車両が走行する走路上に、物体が飛び出す可能性を算出する算出手段と、を有することを特徴とする走行支援装置。
(もっと読む)
入眠判定システム
【課題】本発明は、被験者の入眠状態を精度良く判定することができる入眠判定システムの提供を目的とする。
【解決手段】被験者の心拍数に基づいて、8拍の移動平均であるCVRR8平均心拍数を算出するとともに、1拍毎の心拍数の変化である瞬時のリアルタイム心拍数を算出する。そして、前記CVRR8平均心拍数と前記リアルタイム心拍数を比較して、前記CVRR8平均心拍数に対して前記リアルタイム心拍数がマイナス側に有意差が生じた場合、被験者が入眠状態であると判定する。
(もっと読む)
逆走検知装置、および、逆走通知方法
【課題】車両が逆走していることを、高速かつ確実にユーザに通知する技術を提供する。
【課題を解決するための手段】
本発明の逆走検知装置は、車両に対して情報を配信する路側機から、当該情報の受信対象とされる車両の到来方向を示すデータを受信する通知処理部と、車両の現在位置および進行方向を特定する現在位置算出部と、路側機から受信したデータで特定される車両の到来方向と、現在位置算出部が特定した進行方向と、を比較して、車両が逆走しているか否かを検出する逆走判定部と、逆走を検出した場合には、検出した旨を通知する表示処理部と、を備える。
(もっと読む)
運転診断装置および運転支援装置
【課題】 安全運転診断および省燃費診断を行う際に、効率的な診断を行うことができるとともに、診断結果の正確性に優れたものとすることができる運転診断装置および運転支援装置を提供する。
【解決手段】 運転支援ECU1は、安全運転診断部15において、ドライバの安全運転度合いを診断するとともに、エコ運転診断部16において、ドライバのエコ運転診断を行う。また、運転支援ECU1は、診断配分切替部12を備えており、車両が走行する走行路の傾斜に応じて、安全運転診断およびエコ運転診断の診断配分を調整する。
(もっと読む)
車両の運転支援装置
【課題】 後続車の煽り走行による運転ミスの発生を防止する。
【解決手段】 運転支援制御部34は車間距離センサ1の出力から後続車の煽り走行を検出すると、自動的に、後方視界可変部3を制御し、ルームミラー2による後方視界を通常状態から可変し、ドライバの目に後続車が入らないようして不安や焦りが生じたり、増大するのを防止する。また、車載用ナビゲーション装置10の退避可能場所検索・案内部18に退避可能場所の検索・案内を指示し、現在位置・現在方位データと道路データを用いて、走行中の道路前方の退避可能場所を検索させ、画像と音声で案内させる。これにより、ドライバが焦って退避可能な場所を目で探しながら運転しなくても済む。更に、音警告部4と光系警告部5を稼働し、後続車に警告を発して安全走行を促す。
(もっと読む)
運転負担検出装置
【課題】どのような運転手に対しても安定した判定を行なうことができる運転負担検出装置を提供する。
【解決手段】運転手の活性度に相関を有する2種類の指標A,Bを検出する指標検出手段2,3と、個人別に指標A,B間の線形特性が蓄積される個人別線形特性蓄積手段4と、運転手の個人を特定する個人特定手段5と、個人別線形特性蓄積手段4を参照して上記特定された個人の線形特性を読み出し、読み出した線形特性に応じた運用閾値を設定し、検出された2種類の指標A,Bがいずれも運用閾値を超えた場合に、上記個人が特定されている運転手の活性度が低下したと判定する活性度低下判定手段6とを備えた。
(もっと読む)
検出装置及び相対認識システム
【課題】 歩行者が車両の接近を認識できるようにすること。
【解決手段】
自動車などの車両には車載器2が配置され、この車載器2にはICタグ9が設けられている。検出装置1は、歩行者が携帯しており、この検出装置1にはRFIDリーダモジュール4が内蔵されている。このRFIDリーダモジュール4によりICタグ9の存在が認識された場合、処理部6は車両が歩行者に接近しているものと判断し、通信部7により携帯電話等に報知命令の信号を送信する。携帯電話等では、スピーカーやバイブレータによりユーザに車両の接近を知らせる。これにより、歩行者と車両との接触事故が防止される。また、車載器2にはICタグを用いるので、導入が安価であり、普及させやすい。
(もっと読む)
走行支援装置
【課題】自車両の制御精度に左右されることなく、適切な走行支援を行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、走行制御の制御精度を取得する制御精度取得部4と、走行環境に基づいて進路候補を生成する進路生成部61と、制御精度取得部4において取得された制御精度に基づいて進路候補を評価する評価部62と、評価部62において評価された評価結果に基づいて目標進路を提示する進路決定部63とを備えている。
(もっと読む)
運転支援装置
【課題】車両区画線の位置を適正に推定し、適正な運転支援情報を出力する。
【解決手段】運転支援ECU11は、車両VCが走行する車線の右側及び左側に敷設されている車両区画線WR、WLを検出する白線検出部111と、白線検出部111によって一方側の車両区画線WRが検出され、且つ、他方側の車両区画線WLが検出されていない場合に、該他方側の路側物GLを検出する路側物検出部112と、路側物検出部112によって検出された路側物GLに基づいて、前記他方側の車両区画線VL1の位置を推定する白線推定部113と、白線推定部113によって推定された前記他方側の車両区画線VL1の位置に基づいて、車両VCの車線からの逸脱を判定して警報を出力する情報出力部114と、を備える。
(もっと読む)
運転支援制御装置及びプログラム
【課題】適切に運転支援を行なうことができるようにする。
【解決手段】GPSセンサ12によって、自車両の位置を検出する。規制種別取得部24によって、検出された自車両の位置に基づいて特定される、自車両が進入しようとしている交差点について、情報記憶部22に記憶された交差点進入口規制種別データから、自車側及び交差車両側の各々の交差点進入口の規制種別を取得する。注意義務度設定部26によって、規制種別取得部24によって取得された自車側及び交差車両側の各々の規制種別の組み合わせに対して、事故遭遇時の過失割合に対応する注意義務度を設定する。制御部28によって、設定された注意義務度に応じた運転支援を行なうように運転支援装置16を制御する。
(もっと読む)
車両走行制御装置
【課題】この発明は、先行車の不安定な運転状態を精度良く検出し、運転者に警告し、通常よりも長めの車間距離で追従走行し、先行車を避けて車線変更することで、自車の不安定な挙動を抑制した追従走行が可能な車両走行制御装置を実現することを目的とする。
【解決手段】この発明は、自車が先行車との車間距離を維持した状態で追従走行するよう自車の車両速度を制御する車両走行制御装置において、先行車の車線幅方向における位置である横位置を検出する先行車横位置検出手段と、先行車横位置検出手段により検出された先行車横位置の時系列データを周波数解析する先行車横位置周波数解析手段と、先行車横位置周波数解析手段により解析された先行車横位置の周波数解析結果から先行車の運転状態を判定する先行車運転状態判定手段とを備えることを特徴とする。
(もっと読む)
走行支援装置
【課題】 ナビゲーション装置で得られた情報から判定された道路種別に対して、その道路種別に応じた適正な走行支援を行うことができる走行支援装置を提供する。
【解決手段】 本発明の走行支援ECU1における走行道路種別判定部10では、ナビゲーション情報に基づいて判断した自車両の走行路の道路種別であるナビ情報道路種別に応じたナビ道路種別信号を生成する。走行支援抑制部12では、走行道路種別判定部10から出力されたナビ道路種別信号や各種信号に基づいて、走行支援の抑制を判断する。支援内容決定部11では、自車両に対する支援内容を決定する。また、支援内容決定部11は、走行支援抑制部12から支援抑制信号が出力された際、ナビゲーション情報の利用を中止するとともに、走行支援を抑制する。支援内容実行部13では、支援内容決定部11より出力された支援内容信号に応じた走行支援を行う。
(もっと読む)
運転支援装置
【課題】本発明は、運転支援に必要な車両のみを検出する運転支援装置を提供することを課題とする。
【解決手段】車両が横断又は合流する際に横断する位置又は合流する位置における運転支援を行う運転支援装置であって、一方の車両が横断又は合流する際に横断又は合流される車線を走行する他方の車両を検出する検出手段と、横断又は合流される車線において一方の車両が横断又は合流する位置から離れた位置で他方の車両が直進できない状態であるか否かを検知する検知手段と、検知手段で他方の車両が直進できない状態であることを検知した場合、他方の車両を検出する検出範囲を縮小する検出範囲縮小手段とを備えることを特徴とし、検出範囲縮小手段は、検出範囲を一方の車両が横断又は合流する位置から直進できない位置までに縮小すると好適である。
(もっと読む)
覚醒状態判定装置、運転支援装置、及び覚醒状態判定プログラム
【課題】少ないデータ数でも精度良くドライバの覚醒状態を判定する。
【解決手段】車線検出部52により、撮像装置20で撮像された画像に基づいて、自車両が走行する走行車線を規定する車線を検出し、ΔE算出部54により、X’軸(車両の走行方向)と直交するY’軸方向の車線と自車両との横距離の現在時刻から所定時間までの時間に関する積分値を所定時間で除算した値(ΔE)を算出し、回避行動判定部56により、操舵角センサのセンサ値に基づいて、車両が車線から逸脱する方向と反対の方向への操舵操作である回避行動の有無を判定して回避行動ありのときのΔEをΔE’とし、覚醒状態判定部58により、ΔEがΔEstを超えた時間の割合Δα、ΔE’がΔEstを超えていた回数の割合Δβ、及び、ΔEがΔEstを超えたときから回避行動が行われるまでの時間ΔRTの最大値Δγが、それぞれの閾値を超えたか否かでドライバの覚醒状態を判定する。
(もっと読む)
車内警報装置
【課題】乗員にとって聞き取りやすい警報を出力することができる車内警報装置を提供する。
【解決手段】車内へ警報を出力する警報提供部14を有する車内警報装置1であって、走行時の車内音に雑音を重畳させるとともに、警報提供部14により警報を出力する前にノイズN1を減音する増音部11を備えることにより、増音部11により、走行時に車内へ入力される入力にノイズN1が重畳されるとともに、警報提供部14により警報音P1を出力する前に重畳したノイズN1が減音される。このように、ノイズN1が警報前に一度増音されたのち減音されるので、乗員にとって聞き取りやすい警報を出力することが可能となる。
(もっと読む)
241 - 260 / 2,307
[ Back to top ]