
Fターム[5H180LL07]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音による警報であるもの (2,307)
Fターム[5H180LL07]に分類される特許
221 - 240 / 2,307
意識低下判定装置及びプログラム
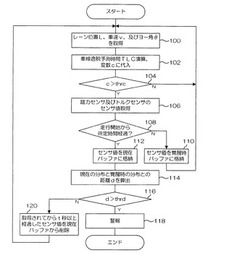
【課題】ドライバの意識低下状態を精度よく判定する。
【解決手段】レーン端までの距離L、車速v、及びヨー角θに基づいて車線逸脱予測時間TLCを演算し(102)、TLCが予め定めた閾値thrcより大きい場合には、車両がレーンに近接しており、危険な状況にあると判定して(104)、踏力センサ30及びトルクセンサ32で検出されたセンサ値を取得する(106)。走行開始から所定時間内である場合には、取得したセンサ値を覚醒時バッファに格納し(108、112)、走行開始から所定時間を経過した場合には、現在バッファに格納する(108、110)。覚醒時バッファに格納されたセンサ値の分布と現在バッファに格納されたセンサ値の分布とのマハラノビス距離dを演算し(114)、距離dが予め定めた閾値thrdより大きい場合には、ドライバが意識低下状態にあると判定する(116、118)。
(もっと読む)
オンラインリスク認識システム

【課題】実際の環境下での経験を自律的に学習して危険度を認識する際、多様な外界環境に対するロバスト性を向上する。
【解決手段】1次元上ループ上のSOMを走行状態に応じて複数のモデルに分割したモデル群を昼夜の別等に応じて並列化しておく。そして、認識モデル設定部5aで選択したモデル群の中から車速や舵角等の情報によって使用するモデルを選択することで、入力データの希薄な部分に対してユニットが配置されることを回避する。次に、認識学習部5bでSOMモデルに特徴量抽出部4で抽出した画像特徴量のみを入力して状態の認識及び学習を行うことで、性質の異なるデータ入力に対するロバスト性を向上する。更に、リスク認識部7で状態と教師との相関関係を求め、状態のリスクを学習・認識する。これにより、リスク認識の際の多様な外界環境に対するロバスト性を向上することができる。
(もっと読む)
運転者疲労軽減・回復システム
【課題】長時間運転するタクシー・トラック・バスの運転手、または一般ドライバーで疲労軽減の一助として、交差点で停止時や長時間の客待ち停車、あるいは荷受け/荷渡しの待ち時間に、運転席で目を閉じて疲労を軽減・回復できるが、そのためには交差点の信号待ちや客待ちや荷受け/荷渡しで車列が動き出した時に運転者に警告を出す装置が必要である。
【解決手段】停車中の車の運転手に、その前に停車している車(以下前車という)が動き出したタイミングを音、光や振動などで運転者に通知する運転者疲労軽減・回復システムで、前車移動検知部・通知部と管制部から構成される。検知部が前車の動き出しを光・電波・超音波などで検知し、そのタイミングと同期して通知部は運転者に通知する。管制部は該システムの始動、一番先端に止まったときの赤信号検出システムまたは信号待時間設定システムへの切り替え、通知部の通知方法選択などの機能を有する。
(もっと読む)
車接近警告装置
【課題】自転車が歩道を歩いている歩行者に音も無く背後から急速に近づき、接触事故を起こすケースが目立っている。速度の速い場合は自転車が前方を歩行している歩行者に接近する時間も短いので早めに適切な音量で歩行者に自転車の接近を知らせる必要がある。
また、今後急速な普及が予測されている低騒音の電気自動車、電気オートバイの普及により歩行者への接近に気がつくのが遅れて生ずる人身事故の多発が懸念されている。
【解決手段】車に速度検知手段を設け、該速度手検知手段によって車の走行速度を検知し車の速度の増減に連動して、警告音の音量を増減させる。車の接近速度が速い場合音量が大となるため、歩行者は車の接近を早めに察知し身構える余裕が出来き、接触事故を減少させることができる。
(もっと読む)
自動車運転者居眠り防止装置
【課題】 運転手の生体情報から眠気を検知し、注意喚起を行うシステムにおいて、市街地の走行時など、運転者が運転操作に集中しているときに、間違えた判定を検出し、不用意な注意喚起を与え運転者に吃驚させないようにする。
【解決手段】 取得した生体情報を分析して眠気検知を行う前に、車両がどのような場所を走行しているかを検知し、郊外の道路や高速道路など、直線もしくは緩やかなカーブが続いており、交通信号機の間隔が長いような場所を走行している場合に、生体情報を分析し、眠気状態を判定し、眠気が生じていると判断した場合は運転者に注意喚起を与え、市街地を走行していると判断した場合は、運転者への注意喚起発生を中止する、もしくは、通常よりも十分弱く発生させることにより、運転者への吃驚を与えない。
(もっと読む)
後方視認支援システム
【課題】右左折時などに運転者が後方視認を容易にでき、接近車両の有無を運転者に警告可能な支援装置を提供する。
【解決手段】フェンダ部71に撮像方向を変更可能なカメラ2を固定する。カメラ2は後方を撮像し、撮像方向をモータ22の回動によって変更可能に設ける。蛇角センサ3が蛇角データを検出し、検出した蛇角に見合った分だけモータ22を回動させ、カメラ2による撮像方向を、直進時の後方側へと移動させる。一方、蛇角データが所定値以上の場合には、比較判断手段43が、カメラ2の撮像した現在画像データと直前画像データとを入力して、現在画像データに直前画像データよりも大きく撮像された接近部分があるか否かを判断する。比較判断手段43が、接近部分が有り、且つ、所定値以上の蛇角操作があった場合には、警告信号を出力し、スピーカ6等によって運転者に警告を促す。
(もっと読む)
運転支援装置
【課題】簡易な構成にして低コスト化を図りつつドライバへ適切な注意喚起を行うことの可能な運転支援装置を提供する。
【解決手段】相関関係判定部(13)により、道路線形・対向車位置演算部(12)で演算する道路線形及び他車の位置情報及び進行距離演算部(22)から入力される自車の進行距離Lxにより演算される自車の位置情報に応じて自車及び他車の相対位置を判定し、表示a、表示b、表示cのいずれかで表示灯(15)を点灯させ注意対象の方向を示し、同時に状況に合わせた音声で注意内容を報知する。
(もっと読む)
車両用運転支援装置
【課題】車線逸脱に対する警報をよりドライバのフィーリングに合致したタイミングで行うことができる車両用運転支援装置を提供する。
【解決手段】制御ユニット5は、自車両1前方で認識した白線に沿って警報判定用ラインを設定し、当該警報判定用ラインと自車両との相対的な位置関係に基づいて車線逸脱警報を行う場合において、左右の白線H1,H2に沿って設定した基準となる警報判定用ラインwl,wrに対する補正量Dl,Drを予め設定された条件に基づいてそれぞれ演算し、白線H1,H2の外側或いは内側に対して各警報判定用ラインwl,wrを補正量Dl,Drだけオフセットさせて最終的な警報判定用ラインWl,Wrを設定する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】目標駐車位置への誘導を開始することが可能な範囲をさらに拡大して、より多くの駐車シーンに対応できるようにする。
【解決手段】自車を後退開始位置P3から目標駐車位置P2へと誘導するための誘導経路として、一般的な経路パターンである標準パターンの標準経路のほかに、回避ポイントAP1を回避しつつ目標駐車位置P2に正確に駐車させる障害物回避経路を計算する機能を駐車支援コントローラに持たせる。駐車支援コントローラは、回避ポイントAP1を避けて目標駐車位置P2に正確に駐車できる標準経路が算出できない場合は、誘導経路の経路パターンを標準パターンから障害物回避パターンに変更して障害物回避経路を算出し、この障害物回避経路に沿って自車を目標駐車位置P2へと誘導する。
(もっと読む)
周辺表示装置
【課題】自動車などの移動体において周辺の俯瞰画像を表示する場合に、オクルージョン領域の存在を考慮した表示を可能とする周辺表示装置を提供する。
【解決手段】画像処理装置10は、画像データを取り込む画像取得部11と、画像データに基づいて3次元情報を計測する3次元情報計測部12と、画像データの視点位置を変更した視点位置変更画像を作成する視点位置変更画像生成部14と、3次元情報計測部12で計測された3次元情報に基づいて、視点位置変更画像上の3次元情報から障害物のある領域と推定される障害物領域を判定するとともに、その周辺で3次元情報を取得不能な領域を危険領域と判定する危険領域判定部13と、危険領域判定部13での判定結果に基づいて、視点位置変更画像上の危険領域等にマーキングを行う重畳情報画像生成部15と、視点位置変更画像を合成する視点位置変更画像合成部16とを備えている。
(もっと読む)
進路評価装置
【課題】他車両のドライバの操作を配慮した進路を走行することが可能となり、より安全な交通環境を実現することができる進路評価装置を提供する。
【解決手段】進路評価装置60は、自車両81の進路候補a1,a2を生成する進路候補生成部61と、他車両82の進路b1,b2,・・・,b9を予測する進路予測部62と、自車両81の進路候補a1,a2と他車両82の予測進路b1,b2,・・・,b9との干渉状態を複数の干渉形態に分類する分類部63と、分類部63において分類された干渉形態に基づいて自車両81の進路を評価する進路評価部64とを備えている。
(もっと読む)
運転支援装置
【課題】矢灯器付きの信号機が設置された交差点において適切な運転支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置は、自車両が矢灯器方向に進行すると判断されたときは、インフラ情報及び自車両の車速に基づいて、自車両が現車速を維持した場合に交差点を通過する時の信号機の状態を判断する。このとき、自車両が現車速を維持した場合に交差点を通過する時の信号機の状態が黄信号の点灯タイミングであると判断されたときは、自車両が黄信号の点灯中に交差点を通過できるように誘導する。自車両が現車速を維持した場合に交差点を通過する時の信号機の状態が矢灯器信号または赤信号の点灯タイミングであると判断されたときは、自車両が矢灯器信号の点灯中に交差点を通過できるように誘導する。
(もっと読む)
車両用物体検知装置
【課題】 自車が衝突する可能性のない走行路上方の走行案内板を精度良く判定する。
【解決手段】 レーダー装置Rが送信した電磁波が物体により反射された反射波に基づいて物体検知手段が自車Vから物体までの距離および自車Vの進行方向に対する物体の左右方向の検知幅Wを取得し、制御対象判定手段がレーダー装置Rの出力に基づいて制御対象となる物体を判定する。このとき、制御対象判定手段は、取得された検知幅Wが予め設定された判定閾値以上であり、かつ自車Vから物体までの距離の減少に応じて検知幅Wが減少する場合に該物体を走行案内板Tであると判定して制御対象から除外するので、つまり走行案内板Tは検知幅Wが実際の左右幅Wtよりも大きく検知され、かつ自車Vの接近に応じて検知幅Wが減少することを利用し、走行案内板Tを精度良く判定して制御対象から除外することができる。
(もっと読む)
進路評価装置および進路評価方法
【課題】 走行効率を高いものとするとともに、他の物体との干渉を回避可能とし、走行効率と干渉回避との両立を図りながら移動体の進路を評価することができる進路評価装置および進路評価方法を提供する。
【解決手段】 進路生成部11は走行情報に基づいて自車両の予測進路を複数生成する。悲観進路生成部12で複数の予測進路について悲観進路を生成する。歩行者接近行動算出部13は、走行情報取得部2から送信された走行情報に基づいて歩行者接近進路を求める。悲観進路評価部14は、複数の悲観進路と歩行者接近進路とを比較し、各悲観進路についての悲観評価値を生成する。進路評価部15は、悲観評価値が最も高い予測進路を自車両の進路として決定する。
(もっと読む)
車両周辺監視方法及び車両周辺監視装置
【課題】車両に乗り込もうとしている運転者に対して、確実に車両周辺の障害物の存在を認知させる。
【解決手段】車両に接近する運転者を認識する車外運転者認識部と、車両周辺の障害物の存在に関する障害物情報を生成する障害物情報生成部と、前記障害物情報生成部による障害物情報を前記認識された車外の運転者に報知する報知部とを備える車両周辺監視装置。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】超音波センサ等を用いず画像認識処理だけで、車両周囲に広がる壁を障害物として検出できる「障害物検出装置および障害物検出方法」を提供する。
【解決手段】4方向の撮影領域の車両周囲画像について障害物検出部25により障害物の検出処理を行った結果、ある撮影領域の車両周囲画像から障害物が検出されなかった場合であっても、その撮影領域に隣接する撮影領域の車両周囲画像について、隣接する撮影領域どうしの重複領域において障害物が検出されていると重複領域判定部26により判定されたときには、障害物が検出されなかった車両周囲画像の撮影領域に障害物が存在するとみなすことにより、ある撮影領域の車両周囲画像に写っている壁を障害物として検出できない場合でも、他の車両周囲画像の重複領域での障害物の検出結果を補助的に用いて、壁を障害物として検出できるようにする。
(もっと読む)
出会い頭衝突防止支援装置
【課題】自車両の周囲の情報提供範囲内に他車両が入ったことに基づいて出会い頭衝突の警告を行う装置において、車両の混雑度に応じて情報提供範囲を適切に制御する。
【解決手段】出会い頭衝突防止支援装置は、他車両から受信した電波に基づいて、自車両4の周囲の車両の混雑度の指標を取得し、取得した混雑度の指標に基づいて、車両4の周囲の車両の混雑度が高いほど、情報提供範囲を狭くし、混雑度が小さいほど、情報提供範囲を広くする。
(もっと読む)
運転支援装置
【課題】よりドライバーに違和感を与えずに運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】信号機の点灯状態に関する信号機情報を取得する通信装置104と、通信装置104が取得した信号機情報に基づいた最初のサービスを実行可能であり、最初のサービスの実行後に、信号機情報に基づいた後続のサービスを実行可能なインフラ協調ECU110とを備えた運転支援装置100において、インフラ協調ECU110は、第最初のサービス及び後続のサービスの内のいずれか一方を実行しないときは、もう一方のサービスも実行しないため、一部の種類の情報提供しかなされずに、期待していた他の種類の情報提供が行われないといったドライバーに違和感を与える事態を防止できる。
(もっと読む)
運転支援装置、及びプログラム
【課題】簡易な構成で、ドライバの運転を安全な運転及び省燃費な運転に導く。
【解決手段】自車両1の速度を検出する車速センサ16と、周辺車両90と自車両1との間の車間距離D[m]を検出する車間距離センサ14と、予め定められた車間時間32aに対応する自車両1のドライバの心理状態が登録されたテーブル32及び予め定められた車間時間30aに対応する周辺車両90のドライバの心理状態が登録されたテーブル30を記憶したHDD18とを含んで構成し、検出された速度V[m/s]及び検出された車間距離D[m]に基づいて、車間時間T[s]を演算し(ステップ108)、演算された車間時間T[s]及びHDD18の記憶内容に基づいて、演算された車間時間T[s]に対応する自車両1のドライバの心理状態及び周辺車両90のドライバの心理状態を自車両1のドライバに報知するように制御する(ステップ110、112、114)。
(もっと読む)
車両走行支援装置および車両走行支援方法
【課題】交通流の悪化を抑制する車両走行支援装置および車両走行支援方法を提供する。
【解決手段】
本発明に係る車両走行支援方法は、対象信号機の点灯状態を示す信号機状態情報を、車両11が対象信号機に到達する前にドライバに報知する車両走行支援方法であって、信号機状態情報を得るステップS11と、信号機状態情報を得た後に、車両11の停止を検出する停止検出ステップS12と、停止を検出したときに、その停止が車両周囲の交通状況に応じた停止か否かを判定する判定ステップS13、S15、S16、S18とを含んでいる。そして、その停止が車両周囲の交通状況に応じているときには信号機状態情報をドライバに報知し、一方、その停止が車両周囲の交通状況に応じていないときには信号機状態情報をドライバに報知しない。
(もっと読む)
221 - 240 / 2,307
[ Back to top ]