
Fターム[5H180LL15]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | カーブ、見通し・視界不良箇所 (1,253)
Fターム[5H180LL15]に分類される特許
161 - 180 / 1,253
車両運転支援装置
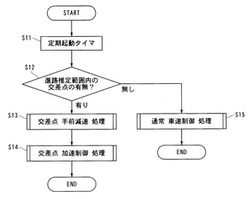
【課題】交差点を設定された適切な速度で通過するように車速を制御しつつ、通過し終えた交差点の先に例えば横断歩道がある場合に、その横断歩道等についても適切な速度で通過することができる車両運転支援装置を提供する。
【解決手段】推定進路上の交差点での右左折に際して、その交差点を目標通過速度で通過できるように交差点の所定距離だけ手前から減速制御を実行する。右左折をもって通過した交差点の先に横断歩道がある場合を想定し、交差点加速抑制処理として、カメラが交差点を検知するまで、あるいは交差点を通過後に所定距離だけ走行し終わるまでは、加速させない。
(もっと読む)
運転支援装置

【課題】車両に搭載した装置によって信号機が黄色表示になる時間を取得することができ、その情報を用いることでジレンマゾーン問題に対処できる運転支援装置を提供する。
【解決手段】車両に装備されたカメラで車両前方の画像を撮影して(S30)、画像認識処理を実行し(S40)、画像内の歩行者用信号機が赤信号に変化したことが検出されたら(S70:YES)、車両用信号が黄信号に変わる予想時間を算出し(S80)、さらに車両が交差点の停止線に到達する予想時間を算出し(S100)、両予想時間の比較から、車両用信号機が青信号であるうちに車両が停止線に到達できるか否かを判定する(S110)。青信号であるうちに停止線まで到達できない場合には、運転者にその情報を報知する(S120)。
(もっと読む)
車両用情報提供装置
【課題】 車車間通信手段のような装置を搭載していない車両に対する出会い頭の事故を未然に回避できるようにする。
【解決手段】 自車VAが、自車VAの位置、走行速度および走行方向を含む自車情報と、検出車両VBの位置、走行速度および走行方向を含む移動物情報と、それらが得られた時刻を含む時刻情報とを基地局20に送信すると、基地局20は前記各情報に基づいて地図データ上における検出車両VBの存在確率を算出するとともに、自車位置および検出車両VBの存在確率に基づいて交差点に存在する検出車両VBの予測情報を自車VAに送信するので、前記予測情報とに基づいて自車VAの乗員への注意喚起や警報を行うことで、検出車両VBとの出会い頭の衝突を回避することができる。その際、検出車両VBは自車VAと同じ装備を備えている必要がないため、全ての検出車両VBを対象として出会い頭の衝突を回避することができ、しかも各交差点毎にインフラを整備する必要がないので低コストで実現することができる。
(もっと読む)
移動通信機、路側通信機、及び路上通信システム
【課題】より効率的に車車間通信を行い通信資源を有効に活用することができる移動通信機、路側通信機、及び路上通信システムを提供する。
【解決手段】車載通信機3は、車両5に搭載されるとともに、他の車載通信機に無線信号を送信するための送受信部31と、当該車載通信機3が搭載される車両5の将来の挙動を予測する挙動予測部32bと、挙動予測部32bの予測結果に基づいて、送受信部31の送信条件を調整する調整部32dと、を備えている。
(もっと読む)
運転支援装置
【課題】交差点におけるドライバーの安全確認を確実に行わせることができると共に、交差点における安全性を向上させることのできる運転支援装置を提供する。
【解決手段】ドライバーの運転診断結果あるいは交差点における見通し状態に基づいて、ドライバーに対して安全確認をするように誘導する安全確認誘導制御部29を備える。ドライバーの運転診断結果が悪い場合や、交差点における見通しが悪い場合は、操舵アシスト力を増加させたり、操舵ゲインの感度を低下させることによって交差点における車両の操作を慎重にさせるようにする。これによって、ドライバーが交差点で慎重に運転を行われるようにする。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方にある道路区間における走行予想軌跡を、より実際の走行軌跡に近い走行予想軌跡として導出することができる技術を提供する。
【解決手段】自車両の周囲を走行する他車両の位置および車速を含む他車両情報を取得し、前記自車両の前方における道路の形状を示す道路形状情報を取得し、前記道路形状情報に基づいて前記道路に所定形状の区間が含まれるか否かを判定し、前記所定形状の区間が含まれる場合に、前記自車両の走行予想軌跡を取得し、前記自車両の走行予想軌跡が前記自車両の走行車線に隣接する隣接車線に最接近する最接近位置における前記自車両と前記他車両との接近度を前記他車両情報に基づいて推定し、前記接近度に応じた運転支援を行う。
(もっと読む)
通信システム、通信方法、及び通信プログラム
【課題】どの車両から情報が送信されたかを明確に認識可能な情報を提示することができる、通信システム、通信方法、及び通信プログラムを提供すること。
【解決手段】通信システム1は、第1の車両100と第2の車両200との間で通信を行なう通信システム1であって、第1の車両100の周囲の視点から見た当該第1の車両100の外観を特定可能な外観画像情報を格納する外観画像DB113aと、第2の車両200から第1の車両100に向かう方向である視認方向を特定する、視認方向特定部112a又は213aと、外観画像DB113aに格納されている外観画像情報に基づき、視認方向特定部112a又は213aが特定した視認方向に対応する第1の車両100の外観画像を取得する外観画像取得部112b又は213bと、外観画像取得部112b又は213bが取得した第1の車両100の外観画像を表示するディスプレイ212とを備える。
(もっと読む)
運転支援装置および運転支援方法
【課題】隣接する車線への車線変更をするか否かを決定する所定値を適切に設定する。
【解決手段】運転支援装置200は、自車両が走行する第一走行車線への合流地点の有無を検出する合流地点検出手段204と、自車両が合流地点に接近していると判断すると、合流車線とは反対側で第一走行車線に隣接する第二走行車線の交通量を取得する第2走行車線交通量取得手段207と、交通量から可能交通容量を取得する第2走行車線可能交通容量取得手段208と、自車両が合流車両と交錯しない場合、第二走行車線の交通量が、可能交通容量に基づいて設定された所定値を超えた場合、第一走行車線を維持するよう案内する案内手段211を備える。
(もっと読む)
表示制御システム、表示制御方法、及び表示制御プログラム
【課題】映像の不必要な細動を抑制することができ、演算負荷を低減することができる、表示制御システム、表示制御方法、及び表示制御プログラムを提供すること。
【解決手段】表示制御システム1は、車両の周辺の画像を取得する車両周辺カメラ10と、車両の走行状況に関する走行状況情報と、ドライバの車両内における移動範囲を特定する移動範囲情報とを、相互に関連付けて格納する移動範囲DB62bと、車両の走行状況を特定する走行状況特定部61bと、走行状況特定部61bが特定した走行状況に対応する走行状況情報に関連付けて格納されている移動範囲情報を移動範囲DB62bから取得し、当該取得した移動範囲情報に基づき、画像における切取範囲を設定する表示制御部61aと、画像のうち切取範囲に対応する画像を表示するディスプレイ50とを備える。
(もっと読む)
走行支援装置
【課題】 右折車両が右折するまで支援が可能な走行支援装置を提供すること。
【解決手段】 周囲の車両から位置情報及び車速情報を受信する車車間通信装置23と、位置情報から右折レーンを走行する先行車両70を特定し、先行車両70の車速情報を監視する情報処理手段24と、車速情報の推移から先行車両70の右折が検出された時の位置情報を右折ポイントに特定する右折位置特定手段24と、右折ポイントまで、自車両の右折を支援する右折支援手段26と、を有することを特徴とする走行支援装置100を提供する。
(もっと読む)
事故予測通知装置、事故予測通知システム及び車載器
【課題】例えば、交差点左折時の通行者の巻き込み事故等にも対応し、また、過去の通行者及び車両の通行経路履歴を考慮し事故の発生し得るエリアを予測する事故予測通知装置、事故予測通知システム及び車載器を提供することを目的とする。
【解決手段】交差点への進入車両が指定ポイントA1に到達したとき、前記進入車両の指定ポイントA1到達時の交差点付近の通行者情報、信号機5の信号灯情報及び記憶部37に記憶された学習エリアマップに基づいて事故発生予測エリアを予測し、車載器61に事故発生予測エリアマップとして送信する。車載器61は受信した事故発生予測エリアマップを車載器61の有する液晶表示パネルなどに表示することにより車載器61を搭載する車両6に対して通知を行う。
(もっと読む)
運転支援情報提供装置及び運転支援方法
【課題】車両の走行方向前方に検出される前方対象物と自車両との位置関係を乗員に分かりやすく伝える。
【解決手段】車両の走行方向前方に検出される前方対象物と自車両との位置関係を算出する位置関係算出機能と、この位置関係に基づいて自車両と前方対象物との接近度を算出する接近度算出機能と、位置関係における自車両と前方対象物との接近度を模擬的に表現する図形を導出する図形導出機能と、導出された図形を含む運転支援情報を車両の運転者の周辺視野内に表示する表示機能と、を実行させる制御装置10を備える。
(もっと読む)
視線誘導装置
【課題】カーブから抜ける際、すなわちコーナーの立ち上がり部分におけるステアリング操作のバラツキを抑えることが可能な視線誘導装置を提供する。
【解決手段】視線誘導装置1は制御開始基準点演算部21を備えている。制御開始基準点演算部21は、自車両がカーブ走行するにあたり、車両位置と道路形状とから自車両の走行経路を推定し、推定した走行経路における車両位置から、道路の内側に向かう接線を算出し、走行経路における車両の走行方向を走行ラインとして検出する。また、制御開始基準点演算部21は、算出した接線と、検出された走行ラインとが為す角度を算出し、角度の変化量が最大となる地点を基準点として算出する。刺激提示装置30は、算出された基準点に基づいて、自車両の運転者に対して視線誘導をすべき旨の報知を行う。
(もっと読む)
無線通信システム、無線通信方法、車載器および車載器の通信方法
【課題】路車間の無線通信において発生する車両等による電波反射により発生する、本来受信する必要のない他の無線通信システムからの電波を誤って受信することなく、目的とする電波のみを正常に受信することができる無線通信システム、無線通信方法、車載器および車載器の通信方法を提供する。
【解決手段】車両に車載器を搭載し、道路脇に設置された路側無線装置との間で電波を用いた通信を行なうことにより、路側無線装置から安全運転支援に関する情報を提供する安全運転支援システムにおいて、車載器が、路側無線装置から配信される車載ナビゲーション用の地図情報に含まれる使用周波数を事前に受信することにより、走行時にその先にある目的とする路側無線装置の周波数に使用周波数を設定する。
(もっと読む)
車車間通信装置及び車車間通信方法
【課題】車両IDを用いた運転支援の動作を安定させる。
【解決手段】
自車両を特定する識別情報を含む情報を他車両に送信し、他車両が送出する、その他車両を特定する識別情報を含む情報を受信する無線通信ユニット100であって、自車両の車両情報から判断される自車両の走行状況が、その自車両と他の物体とが接近する可能性のある接近状況であるか否かを判定する走行状況判定機能と、自車両を特定する識別情報を更新する際に、自車両の走行状況が接近状況であるときは、自車両の識別情報の更新を禁止する識別情報更新機能とを実行する制御装置10を備える無線通信ユニット100を提供する。
(もっと読む)
走行支援装置
【課題】車速変動による燃料消費率の悪化を抑制し、最適な燃料消費率を維持することができる走行支援装置を提供する。
【解決手段】走行支援装置1では、自車両の走行状態が定常走行状態であると判定された場合に、最適な燃費消費率となる最適走行速度を表示部16に表示する。これにより、定常状態以外の場合においては、運転者が最適走行速度に捉われずに運転することになる。そのため、最適速度に合わせようとすることによる運転者のブレーキ操作が減少し、減速回数の増加に起因する速度変動を抑制することで、燃費の悪化を防止することができる。このように、定常走行状態では最適な燃費消費率となる最適走行速度を表示することで燃料消費率の向上を図り、それ以外の走行状態では最適走行速度を表示しないことで燃料消費率の悪化を防止することにより、最適な燃料消費率を維持することができる。
(もっと読む)
安全運転支援システムおよび車載端末
【課題】車両に搭載された車載端末により広域無線通信を用いて安全運転支援を実現する場合、通信の輻輳により、情報のリアルタイム性が失われてしまうという問題があった。
【解決手段】安全運転支援のサービス対象を交通事故発生率が高い特定エリアに限定することで広域無線通信の輻輳を回避する。特定エリアの情報は、安全運転支援のサービスを受けるべき車両に搭載された車載端末が、広域無線通信にて処理センターからダウンロードすることで得られる。車両に搭載された車載端末が基地局に対して登録処理を行う際に、広域無線通信の基地局の更新領域内で定義された特定エリアの情報をダウンロードする。
(もっと読む)
車両用情報提供装置及び車両用情報提供方法
【課題】学習精度及び運転不全状態の情報提供の精度を向上可能な車両用情報提供の技術を提供する。
【解決手段】取得した運転状態の情報をからなる学習情報により運転者の運転特性を学習する。また、直近に取得した運転状態の情報に基づき直近の運転特性を求める。そして、学習した運転者の運転特性に対する直近の運転特性に基づき、運転者の運転不全状態を判定し、運転不全状態と判定した場合に運転者へ情報提供する。このとき、運転者の普段の運転特性が発現し難いと想定される走行状態のときの運転状態の情報を学習情報として使用することを禁止する。また、運転状態を運転不全状態と誤認知する因子がある走行状態の場合には、上記情報提供若しくは運転者の運転不全状態の判定を禁止する。
(もっと読む)
運転支援装置、及び運転支援方法
【課題】車両の減速が必要となるときに、その旨を効果的に運転者に通知する。
【解決手段】自車進路前方の道路形状に応じて自車両が減速を開始すべき減速タイミングを判断し、判断した減速タイミングよりも前の時点で、運転のアクセル操作に対する操作反力を増加補正する。すなわち、減速開始閾値thRから早期係数XAを減算した補正開始閾値(thR−XA)を設定し、目標減速度Xgが補正開始閾値(thR−XA)以上となるときに(ステップS25の判定が“Yes”)、アクセル操作反力を増加補正する(ステップS26)。このとき、目標減速度Xgと補正開始閾値(thR−XA)との差分が大きいほど、アクセル操作に対するペダル反力の増加補正量を大きくする。
(もっと読む)
運転操作支援装置、自動車及び運転操作支援方法
【課題】運転者に対する警報をより適切に行うこと。
【解決手段】警報対象の位置と、自車両の走行位置とに基づいて、警報対象に対する自車両の接近度合いを検出する接近度合い検出手段と、接近度合い検出手段が検出した接近度合いが予め定めた第1の判定基準値以下となった場合に警報を発生する第1の警報手段と、接近度合い検出手段によって検出した接近度合いが、第1の判定基準値より小さい第2の判定基準値以下となった場合に警報を発生する第2の警報手段と、第1の警報手段における警報を許可するか否かを設定する警報設定手段と、警報設定手段において、第1の警報手段における警報を許可しない設定となっている場合に、第2の判定基準値を第1の判定基準値に近づける補正を行う判定基準補正手段とを有する運転操作支援装置である。
(もっと読む)
161 - 180 / 1,253
[ Back to top ]