
Fターム[5H301AA03]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 陸上 (1,642) | 屋外 (120)
Fターム[5H301AA03]に分類される特許
1 - 20 / 120
走行制御装置および車両
【課題】衝突回避対象の物体の種別に応じて、安全に物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
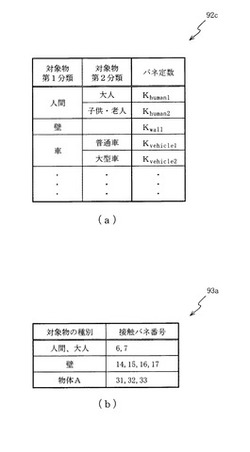
【解決手段】対象物の種別に応じて、その対象物に接触されているバネ73のバネ定数を設定し、そのバネ定数を使用して、収縮したバネ73から車両に加えられる反発力を算出する。これにより、対象物の種別に応じて適宜バネ定数を定義することにより、対象物の存在によって車両に加えられる反発力Frを、対象物の種別に合わせて大きくしたり、逆に、小さくしたりすることができる。よって、優先的に衝突を回避しなければならない物体については、より強い反発力が車両に加えられるようにすることができるので、衝突回避対象の対象物の種別に応じて、安全に物体の衝突回避を行うことができる。
(もっと読む)
走行制御装置および車両

【課題】物体の衝突を回避しつつ、車両を物体に近づけることができる走行制御装置および車両を提供すること。
【解決手段】車両1の速度が大きいほど長い第1バンパー距離71を設定する。これにより、車両1が低速走行する場合には高速走行する場合に比較して、第1バンパーより71が短いので、物体80が近くまで迫った場合に第1反発力F1が仮想的に車両に加えられる。すなわち、車両1が低速走行する場合、車両1と物体とが遠い間は、第1反発力F1が車両1に加えられないか、若しくは、小さな第1反発力F1が車両1に加えられる。よって、車両1を物体80に近づけることができる。
(もっと読む)
走行制御装置および車両
【課題】車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供すること。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
自動走行車両及び自動走行車両の制御方法
【課題】走行経路の詳細な位置データやティーチングが不要であり、走行経路を設定する手間が大幅に軽減される自動走行車両を提供する。
【解決手段】本発明に係る自動走行車両1は、車両本体2と、少なくとも車両本体2の両側方に位置するオブジェクトを検知する検知部3と、車両本体2の動作パターンを記憶する記憶部と、車両本体2の動作を制御するコントローラであって、少なくとも、車両本体2の一の側方に位置するオブジェクトを中心とした弧を描くように車両本体2を走行させ、車両本体2の他の側方を通過するオブジェクトの個数をカウントし、カウントされた前記オブジェクトの個数に基づいて、前記動作パターンにしたがって車両本体2の動作を変更するコントローラと、を有する。
(もっと読む)
特徴の配置のための位置制御システム
【課題】 作業位置の間を自発的に往来することが可能な作業機械の位置を決定する作業機械に使用するシステムを提供する。
【解決手段】 本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。
(もっと読む)
自律走行装置及び自律走行方法並びにそのプログラム
【課題】分岐路のある道路でも白線などのガイド線を用いずに自律走行が可能となる自律走行装置を提供する。
【解決手段】周囲の検出範囲の接地面に仮想的に設けた点範囲それぞれの高さを検出し、近傍の点範囲との高さの差が路肩検出基準値以上となる場合の点範囲を、路肩点を示す点範囲と検出する。そして、検出範囲内における基準経路の左右両側それぞれにおいて検出した路肩点を左右両側ごとにそれぞれ結んだ左右両側それぞれの路肩線を特定し、当該左右両側それぞれの路肩線に基づいて道路形状を認識する。また、検出範囲内の左右の路肩線の間に仮想的に設けた複数の経路候補が示す点範囲を特定し、当該経路候補が示す各点範囲の高さと、当該経路候補が示す点範囲隣接する他の点範囲の高さとの変化量の小さい経路候補を走行経路と特定する。
(もっと読む)
無人移動体及び無人移動体の制御方法
【課題】道路のある環境下で且つ道路や交差点に関する事前情報が一切ない状況下で、曲がり道や交差点を道なりに走行させることができ、交差点での右左折も曲折の指示のみで円滑に行わせ得る無人移動体及び無人移動体の制御方法を提供する。
【解決手段】特に指示がない場合には、それまで走行してきた走行路に継続し易い道なり走行路Rを測距データに基づいて局所地図上で抽出して、この道なり走行路Rに沿って半自律走行車Aを自律走行させ、交差点Cで他の走行路Rlへ向かわせる場合には、交差点進入時に受ける新規操舵指令に従った他の走行路Rlへの変更路Rcを設定して、この変更路Rcを介して半自律走行車Aを他の走行路Rlへ進行させる。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域の境界と走行予定領域における作業車の位置を簡易な構成で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】原動機(電動モータ)と、原動機に接続される駆動輪と、作業機(ブレード)とを備え、走行予定領域を原動機を駆動して自律走行しつつ作業する自律走行可能な作業車の制御装置において、方位(地磁気)センサの出力に基づいて絶対方位を検出すると共に、磁気ネイル(磁石)に対する位置を検出し、磁気ネイルの埋設位置を座標で示す地図情報と検出された位置に基づいて走行予定領域における作業車の位置を検出し(S12,S20,S32)、検出される絶対方位と作業車の位置とYawセンサなどの出力に基づいて算出される進行方位と走行距離に基づき、予め定められた作業プログラムに従って走行予定領域Aでの作業を制御する(S10からS46)。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域において予め定められた走行パターンに従って走行すると共に、角速度センサの出力を適正に較正するようにした自律走行作業車の制御装置を提供する。
【解決手段】作業車の重心位置の鉛直軸回りに生じる角速度を示す出力を生じるYawセンサと車輪速を示す出力を生じる車輪速センサの出力に基づいて算出される進行方位と走行距離に基づき、走行予定領域において予め定められた走行パターンに従い、作業車を直進走行させつつ、作業させる走行作業制御において、直進走行のとき、予め定められた走行パターンで予定される予定走行距離L1と実走行距離L2の差が誤差許容値αを超えるか否か判定し(S10からS18)、差が誤差許容値を超えると判断されるとき、Yawセンサの出力の中心値を補正する(S22)。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
車両制御装置
【課題】自車の走行時の状態に応じて、より適切な走行モードに切替えることのできる車両制御装置を提供すること。
【解決手段】車両制御装置2に、自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する通信追従走行制御と、先行車100と自車1との間の位置関係情報をレーダー12で取得し、取得した位置関係情報に基づいて自車1の走行状態を制御する自律追従走行制御と、を切替えて追従走行が可能な走行制御ECU20を備え、通信追従走行制御中に通信追従走行制御を行うことが困難になった場合には自律追従走行制御に切替え、且つ、切替え後の自車1と先行車100との車間距離または車間時間を通信追従走行制御中における車間距離または車間時間よりも大きくする。
(もっと読む)
磁気マーカ検出装置
【課題】磁気マーカの誤検出の低減と、どの角度から進入しても磁気マーカを検出可能な磁気マーカ及び磁気センサからなる磁気マーカ検出装置を提供する。
【解決手段】路面に埋設した路面垂直方向の磁極の異なる2列の磁気マーカと、少なくとも3つ以上の磁気検出素子を多角形に配置した磁気センサと、前記磁気センサの検出結果に基づき前記2列の磁気マーカを検出したか判断する磁気マーカ検出手段とを備え、前記磁気センサで少なくとも2つの磁気検出素子が磁極の異なる磁気を検出した場合に前記磁気マーカ検出手段が前記2列の磁気マーカを検出したと判断する。
(もっと読む)
無人車両の走行システムおよびその走行制御方法
【課題】両側積込みで無人車両に走行指令を与えるに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。また、両側積込みで積込み点の位置を設定するに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。
【解決手段】両側積込みで無人車両に走行指令を与えるに際して、走行指令が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。また、両側積込みで積込み点の位置を設定するに際して、積込み点の位置設定が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
走行軌道作成装置
【課題】自動走行時、走行環境に合わせて進路を柔軟に変化させつつ、進路変化前後で連続性・一貫性を保持することで交通秩序の乱れを抑制することができる走行軌道作成装置を提供する。
【解決手段】走行軌道作成装置11は、環境情報、他車両情報、自車情報も取得するとともに自車両の位置を同定するセンサ部12と、センサ部12から出力された情報に基づいて自車両の運行計画を立案し、この運行計画に基づいて1又は複数の定型進路を生成する定型進路生成部13と、自車両が行動可能な進路案を1又は複数生成する進路生成部14と、定型進路生成部13から出力された定型進路と、進路生成部14から出力された進路案とに基づいて、自車両の進路を選択する進路選択部15と、進路選択部15から出力された進路に基づいて、自車両を駆動制御する駆動部16と、を備える。
(もっと読む)
ゴルフカートおよびゴルフカート走行制御システム
【課題】円滑な移動が可能なゴルフカートおよびゴルフカート走行制御システムを提供することである。
【解決手段】電磁誘導線81上を2台のゴルフカート1A,1Baが同じ方向に順に走行する場合、ゴルフカート1Aは、1つ前のゴルフカート1Baからのカート情報を受信しかつ追突防止信号を受信する。その場合、ゴルフカート1Aは徐行または停止する。ゴルフカート1A,1Bbが電磁誘導線82,83上を互いに逆方向に走行する場合、ゴルフカート1Aが、1つ前以外のゴルフカート1Bbからのカート情報を受信し、かつ追突防止信号を受信する。その場合、ゴルフカート1A,1Bbは走行を継続する。
(もっと読む)
1 - 20 / 120
[ Back to top ]