
Fターム[5H301BB10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 検査、監視作業用 (48)
Fターム[5H301BB10]に分類される特許
1 - 20 / 48
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】往路走行モード選択時における遠隔操縦装置の操作感と、復路走行モード選択時における遠隔操縦装置の操作感とを共通化し、無人走行体の遠隔操縦性を高める。
【解決手段】手持ちコントローラ205,305に、無人走行体4,5の走行モードを往路走行モード又は復路走行モードに切り換える前後進切換スイッチ410,411と、無人走行体4,5の走行方向を指示するジョイスティック408を備える。無人走行体の走行モードを往路走行モードから復路走行モードに切り換えたとき、表示装置202,302の第1表示部211,311に表示される映像を、往路前方撮影カメラの撮影映像から復路前方撮影カメラの撮影映像へと切り換える。また、往路走行モードへの切換時と復路走行モードへの切換時とで、手持ちコントローラ205,305の操作内容に応じた無人走行体4,5の動作を同一に保つ。
(もっと読む)
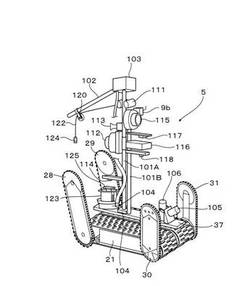
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても鮮明な環境情報を取得可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、前方監視用の光学カメラ(メインカメラ)113を搭載する。また、安全な場所には、遠隔操縦装置305を備えた制御装置本体301を設置する。制御装置本体301は、遠隔操縦装置305の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データを1走査毎に、制御装置本体301に接続されたUSBメモリ306に記憶する。また、光学カメラ113の撮影映像もUSBメモリ306に記憶する。
(もっと読む)
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても、無人走行体の遠隔操縦を円滑に行うことができ、かつ構築物内の状況を明確に把握可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105及び走査式三次元測距装置106を搭載する。走査式三次元測距装置106の検出データから作成される三次元画像を表示装置302に表示し、無人走行体5を遠隔操縦する際の参照データとして利用する。また、走査式二次元測距装置105の検出データをUSBメモリ306に順次記憶し、このUSBメモリ306に記憶された走査式二次元測距装置105の検出データを合成することにより作成される三次元画像を、構築物内の環境情報として利用する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】無人走行体の遠隔操縦を過不足なく行うことができ、かつ無人走行体の誤操作を確実に防止可能な遠隔操縦装置を備えた無人走行体の遠隔操縦システムを提供する。
【解決手段】オペレータが操作する遠隔操縦装置として、タッチパネル203,303と手持ちコントローラ205,305の双方を備える。これらの各遠隔操縦装置によって共通に行える無人走行体の操作と、タッチパネル203,303によってのみ行える無人走行体4,5の操作と、手持ちコントローラ205,305によってのみ行える無人走行体の操作とを設定する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】簡単かつ安価な構成で、無人走行体の活動範囲を延長可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】LANケーブル1を介して接続された第1及び第2の操作卓2,3と、第1操作卓2から出力される制御信号により遠隔操縦される有線無人走行体4と、第2操作卓3から出力される制御信号により遠隔操縦される無線無人走行体5と、第2操作卓3と有線無人走行体4とを接続する通信ケーブル6,7と、通信ケーブル6と通信ケーブル7との間に配置された無線中継装置8と、有線無人走行体4と無線無人走行体5とを接続する無線通信装置9と、通信ケーブル6を巻回したケーブルリール10とをもって、無人走行体の遠隔操縦システムを構成する。
(もっと読む)
走行ロボット
【課題】巻取装置を使用して急傾斜の階段でも安定した昇降が可能であり、且つ階段の踊り場のような狭い場所でも旋回が可能な走行ロボットを提供する。
【解決手段】階段200を上昇又は下降するときに、ワイヤ7若しくはケーブル70の一端を階段200の上方部に固定し、車体1が階段200を降下するときはワイヤ7若しくはケーブル70を送り出し、車体1が階段200を上昇するときはワイヤ7若しくはケーブル70を巻取るように巻取装置5を制御し、且つ、角度検出器9が検出した車体1の角度に基づいて巻取りの停止及び巻取りの開始を制御するようにした。
(もっと読む)
水中移動型検査装置及び水中検査設備
【課題】 海底構造物等の検査対象物が航走体の質量に基づく力を受けて損傷することを防止できるようにすると共に、検査対象物の検査を含む各種作業の質の向上を図ること。
【解決手段】 航走しながら海底パイプライン(検査対象物)13を検査することができる水中移動型検査装置11であって、潜水して、海底パイプライン13に対して非接触状態で検査対象物を辿りながら航走する航走体14と、この航走体14に設けられている第1可動アーム部16と、この第1可動アーム部16に設けられ、海底パイプライン13を検査するための検査用ツール部17と、航走体14が、海底パイプライン13に対して非接触状態で辿りながら航走するときに、第1可動アーム部16を作動させて、検査用ツール部17が海底パイプライン13に対して所定の目標位置関係となるように、検査用ツール部17を移動させることができる制御部とを備える。
(もっと読む)
重心角推定方法及び同方法によって制御される倒立車輪型走行体
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
巡回ロボット及び巡回ロボットの自律走行方法
【課題】巡回ロボットを効率よく走行させる。
【解決手段】巡回ロボット1では、走行管理手段1dの指示により、経路生成手段1cが、現在地点から次の目標の指定地点までの巡回経路情報を生成し、自律走行制御手段1eが、巡回経路情報に基づく巡回経路を自律走行する。走行途中、通行不可の経路が検出されて停止したときは、走行管理手段1dは、停止した位置を現在地点とするとともに、通行不可の経路を走行可能経路から外して再度経路生成手段1cに巡回経路を再生成させ、変更された巡回経路を走行される。走行管理手段1dは、通行不可と判断された経路が、所定の時間が経過するまで巡回経路に組み込まれないようにする。
(もっと読む)
遊泳型アクセス装置の姿勢安定化システム
【課題】バラストタンクのバラスト調整により遊泳型アクセス装置の上下移動だけでなく、姿勢を容易に制御することを可能にする。
【解決手段】完全に分離した複数のタンク22が集合してなるバラストタンク10と、 水中における遊泳型アクセス装置6の本体の傾斜の方向、傾斜量を計測する姿勢計測手段12と、バラストタンク10を構成するタンクのうち、任意のタンクへの注排水を実施する注排水手段と、姿勢計測手段による計測結果に基づいて、目標とする姿勢を保つのに必要な注排水を実施すべきバラストタンク10のタンク22の特定と必要とされる注排水量の演算を行い、その演算結果に従って前記注排水手段の動作を制御する制御手段14と、を設ける。
(もっと読む)
移動装置
【課題】移動体の姿勢を維持できる移動装置は設計が難しく汎用性に欠く。
【解決手段】第1のリニアモータ40は、水平直線軸方向Xに沿って移動する移動体10Aを含む可動物体全体10の重心Gwを通る鉛直方向の直線Z上に推力Fwが発生する力点Pmが位置するように移動体10Aの下側に配設され、所望の移動方向に推力Fwを出力して移動体10Aを移動させる。第2のリニアモータ50は、直線Z上に推力Fsを発生させる力点Psが位置するように第1のリニアモータ40を挟んで移動体10Aと対向する位置に配設され、移動方向とは反対方向に推力Fsを出力して移動体10Aの姿勢を維持する。制御装置は、重心Gwから力点Psまでの距離Lsに対する重心Gwから力点Pmまでの距離Lwの比に推力Fwを乗じて得られる推力Fsに相当する駆動電流を第2のリニアモータ50に供給する。
(もっと読む)
接近困難な内部スペースを独立的に検査するための車両
【課題】僅かな所要スペースと良好な操縦可能性を特徴とし、多種の検査形式に適しており、問題なく内壁に沿って任意の空間的方向に動くことができるような、接近困難な内部スペースを独立的に検査するための装置を提供する。
【解決手段】強磁性の内壁24によって制限された接近困難な内部スペース、特に例えば蒸気タービンの蒸気室のような大きなキャスティング部分をセンサ23で検査するための車両10であって、共通の軸14を中心として回転可能な、軸方向で互いに間隔を置いて配置された、互いに独立的に駆動可能な少なくとも2つの車輪12,13を有している形式のものに関し、車両10が永久磁石等の付着手段21,22;25,26を有しており、該付着手段が、車両10を重力に抗して、車輪12,13で各内壁24に保持することにより、全内部スペースを検査することができる。
(もっと読む)
外殻ロボット駆動システム
外殻ロボットは、ロボット本体と、外殻の周囲でロボットを移動させるための少なくとも一つの駆動モジュールと、搭載型動力源と、この搭載型動力源から動力の供給を受ける駆動モジュール用の動力サブシステムとを含む。複数の永久磁石要素が、駆動モジュールと関連付けられており、かつ、それぞれ、外殻に隣接したときの非短絡状態と、外殻に隣接していないときの短絡状態との間で切り換え可能となっている。 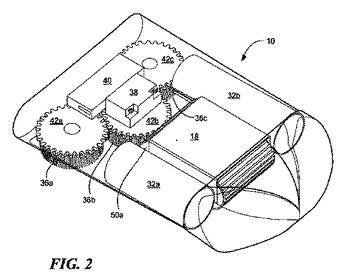 (もっと読む)
(もっと読む)
監視制御装置及び監視システム
【課題】人などの動的な遮蔽物により生じる死角の監視効率を向上することが可能である。
【解決手段】遮蔽物抽出手段46が、監視カメラ10A〜10Dから取得された映像から遮蔽物を抽出し、遮蔽物位置推定手段48が遮蔽物の位置を推定する。そして、死角算出手段50は、推定された遮蔽物の位置から監視カメラの死角の位置を算出し、その死角の位置に基づいて、ロボット目標位置姿勢決定手段54などが、移動ロボット20の位置姿勢を制御するので、死角の位置を的確に算出したうえで、移動ロボットを死角に向けて移動させたり姿勢を変更させたりすることができる。これにより、移動ロボットが撮影機能を有している場合には、死角の撮影を行うことができ、移動ロボットが人を移動させる機能を有している場合には、死角が長時間同一位置に留まらないように、人を移動させることができる。
(もっと読む)
手投げ型ロボット
【課題】ロボットなどに用いられる新たな移動機構の提案。
【解決手段】移動機構として、モータの制御機能を有する本体と、本体の両側に対に設けられ本体に対して回動自在であり走行面に接地する駆動輪と、それぞれの駆動輪をモータでそれぞれ回転させる駆動手段と、それぞれの駆動輪の外側に、走行面に接地すると共に、駆動輪の回動と独立して本体との位置を固定的に保持される保持体とを有する。
(もっと読む)
自律移動装置
【課題】自律移動装置において、簡単な構成により、自律移動装置の異常状態、特に周囲の障害物位置情報を取得するためのセンサに関連する異常状態を容易かつ低コストで検出可能とする。
【解決手段】障害物位置情報を取得する2つの環境情報取得手段21,22と、自己位置取得手段と、障害物位置情報、自己位置情報、地図情報、および制御パラメータに基づいて生成される走行経路に沿って自己の位置を移動させる移動制御手段とを備え、地図情報は環境に固定された障害物であって環境情報取得手段21,22によって検出される障害物の位置情報を含み、一方の、例えば、環境情報取得手段21によって検出された障害物Mの位置が地図情報に含まれる障害物の位置にあるにも関わらず、他方の環境情報取得手段22によって検出された障害物の位置が地図情報における障害物の位置とは異なる場合に自律移動装置1が異常状態にあると判断する異常判断手段を備える。
(もっと読む)
水中移動体の制御装置
【課題】水中移動体の位置および姿勢を精度良く制御する水中移動体の制御装置を提供することにある。
【解決手段】指令速度−指令推力変換手段24は、コントローラ13から入力した速度指令値を指令推力へと変換する。PID制御器27は、変換された指令推力と、3軸周りの角速度と3軸方向の加速度から、XYZ方向の推力制御量を算出する。スラスタ推力配分手段28は、XYZ方向の推力制御量を各スラスタが発生するスラスタ推力に変換する。スラスタ推力−モータ電圧変換手段29は、スラスタ推力を各スラスタの駆動モータの指令電圧へと変換し、スラスタ21,22,23に供給し、水中検査装置9を動作させる。初期キャリブレーション手段30は、指令値−指令推力変換手段24とスラスタ推力−モータ電圧変換手段29で用いる変換ゲインを予め同定し、同定した変換ゲインを各手段24,29に設定する。
(もっと読む)
移動体
【課題】取り扱い容易で破損の危険性の低い移動体を提供する。
【解決手段】移動体1の本体部10は左クローラユニット12Lと右クローラユニット12Rをハウジング11で連結したものである。本体部10の上面にはカメラユニット20と運搬用ハンドル30が設けられる。運搬用ハンドル30の最上位箇所はカメラユニット20の最上位箇所以上の高さとなっており、移動体1が転倒したとき、運搬用ハンドル30はカメラユニット20の保護の役割を果たす。運搬用ハンドル30は本体部10の重心CGよりもカメラユニット20寄りに設けられている。ハウジング11と左右クローラユニット12L、12Rの境界で、それぞれの外殻板同士が合わさって板が二重になった箇所に、運搬用ハンドル30の根元が固定される。運搬用ハンドル30の側面には障害物センサ25が設置される。
(もっと読む)
無人ボート自動観測システムおよび無人ボート自動観測方法
【課題】観測航路を自動的に生成しその観測航路下の水中または水底の様子を自動的に観測できるようにする。
【解決手段】観測航路を生成するために基準観測線を入力し(S1)、前記基準観測線を一定の距離平行移動させることによって複数の観測航路を生成し(S2)、生成された複数の観測航路の距離を確定させると同時に確定させた観測航路の航行順序を指示し(S3)、指示された航行順序にしたがって無人ボートを航行させ(S4)、航行中に少なくとも水中または水底の様子のいずれかを観測し(S5)、観測されている少なくとも水中または水底の様子を表示するとともに記憶させる(S6)。
(もっと読む)
1 - 20 / 48
[ Back to top ]