
Fターム[5H301DD15]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 無線により与えられるもの (358)
Fターム[5H301DD15]の下位に属するFターム
光により与えられるもの (42)
電波により与えられるもの (167)
音波により与えられるもの (15)
Fターム[5H301DD15]に分類される特許
81 - 100 / 134
搬送システム、配車管理装置及び方法、並びにコンピュータプログラム
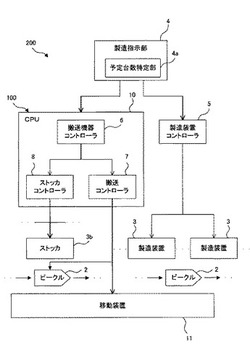
【課題】ビークル等の搬送車を用いた搬送システムにおいて、配車を効率的に行う。
【解決手段】搬送システム(100)は、被搬送物に対して各種処理を施す作業装置(3)を含んで夫々構成される複数の集合の各々の内部及び該複数の集合の相互間で、被搬送物を搬送する。搬送システムは、複数の搬送車(2)と、前記内部及び前記相互間で搬送車を移動させる移動手段(11)と、将来の一時点又は時期において前記内部の各々で被搬送物を搬送するために要求される予定の複数の搬送車の台数を特定する予定台数特定手段(4)と、該特定された台数に基づいて、搬送車を前記相互間で移動させるように、移動手段を制御する制御手段(6)とを備える。
(もっと読む)
搬送車におけるリトラクタブル装置

【課題】タイヤの側方に配置されたアドレスセンサを備えていても、タイヤ交換を容易にできるとともに、シングルタイヤ仕様、ダブルタイヤ仕様の両方に対応することが可能になる搬送車のリトラクタブル装置を提供する。
【解決手段】リトラクタブル装置26は、前輪16の片側に配設される支持ブラケット27に対して平行四節リンク28が支持されている。平行四節リンク28は、上側リンク部材29の中間位置に連結されたワイヤ37を介して操作レバー38の操作により回動される。平行四節リンク28の前側に、搬送車の走行経路に設けられたガイド部材を検出可能なガイドセンサ25が支持されている。搬送車の停止すべき位置を示す表示部を検出可能なアドレスセンサ60は、前輪16に対して平行四節リンク28と反対側において後方に向かって延びる位置と、タイヤの交換に支障の無い位置とに回動可能に設けられている。
(もっと読む)
ロボットクローラのための可変プリミティブマッピング
高レベル(オペレータ入力)プリミティブ42、64から低レベルプリミティブ46、70への可変マッピングを用いることによって、ロボットクローラ10の種々の動作モードが与えられる。そのマッピングは、ロボットクローラ10によって検知される環境データ74、94の関数であり、それにより、動作モードを環境に合わせることができるようになる。 (もっと読む)
認識/推論の水準に応じた階層的構造の室内情報を有する移動サービスロボットの中央情報処理システム及び方法
【課題】一般に、室内環境において移動サービスロボットは、通常の動作のである認識、走行、操作など基本的な機能以外にも自己位置の認識及びマップの生成、セルフモデリング、物等を分類して認識するなどの作業も遂行可能でなければならない。現在、このような移動サービスロボットの各機能について個別の研究が活発に進められている。しかしながら、多種多様な複数の移動サービスロボットを同一環境で動作させるためには移動サービスロボットが必要とする情報を統合して管理し、共有するための体系に関する研究が必要である。
【解決手段】そこで本発明では、室内の移動サービスロボットに必要な室内情報を提供し、移動サービスロボットから変化した情報の提供を受けることで、室内の多数の移動サービスロボットが室内情報を共有できるように室内の空間及び物体に関する情報を統合管理する移動サービスロボットの中央情報処理システム及び方法を提供する。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、現在位置を検出する位置検出部と、検知部が異常検知すると記憶部に異常状態を記憶させる異常判定手段と、検知部の異常検知に基づく異常情報及び現在位置を監視センタに送信する通信制御手段と、記憶部の異常状態を解除する復旧処理を実行する復旧処理手段とを備え、監視センタは、重要エリアを記憶するセンタ記憶部と、自動復旧モードを含む複数のモードを管理するモード設定手段と、移動ロボットから異常情報を受信すると動作する報知部と、移動ロボットの現在位置と重要エリアを比較する位置比較手段と、自動復旧モードであるときに重要エリア外で検知された異常情報を受信すると、報知部の動作を禁止して移動ロボットに復旧処理を実行させる自動復旧制御手段とを備える。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、検知部が異常を検知すると記憶部に異常状態を記憶させる異常判定手段と、検知部が異常を検知すると異常情報を監視センタに送信する通信制御手段と、記憶部の異常状態を解除する復旧処理を実行する復旧処理手段と、を備え、監視センタは、自動復旧を禁止すべき異常を識別するための設定情報を記憶したセンタ記憶部と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、異常情報を受信したときに動作する報知部と、動作モードが自動復旧モードであるときに、自動復旧禁止異常以外の異常情報を受信すると、報知部の動作を禁止して移動ロボットに復旧処理を実行させる自動復旧制御手段と、を備える。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 監視区域の異常を検知する移動ロボットであって、 監視センタと通信する通信部と、監視区域の異常を自動復旧禁止異常か自動復旧禁止異常以外の異常かを識別可能に設定した設定情報および前記監視区域の現状態を記憶する記憶部と、異常を検知すると記憶部に異常状態を保持させる異常処理手段と、異常を検知すると監視センタに異常信号を送信する通信制御手段と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに、自動復旧禁止異常以外の異常が検知されると、当該異常信号の送信を禁止するとともに当該異常状態を解除するための復旧処理を実行する復旧処理手段とを備える。
(もっと読む)
先導者追従車両
【課題】頻繁に加減速や走行停止を繰り返すことのない安定した追従を行いながら先導者が先導者追従車両に自由にアクセスでき、先導者追従車両の動きを操作できる先導者追従車両を実現する。
【解決手段】先導者追従車両1が追従制御を行う追従目標位置は原点が先導者の現在位置、XL軸が先導者の進行方向として定義された先導者中心座標系103において、距離101、角度102で追従制御指示装置を用いて先導者から指定される。角度102、距離101は先導者が突然立ち止まった場合にも先導者に追突することなく安全に停止できる距離や周囲環境のセンシング範囲に制限される。追従目標位置の指定には先導者追従車両1が先導者に対して前進して追従するか後進して追従するかも指定する。前進か後進かを指定できることで先導者によって先導者追従車両が可能な動きの全てを操作することが可能となる。
(もっと読む)
走行車システム
【構成】 走行ルートのレイアウト情報で、開放距離を示すパラメータを指定し、コントローラと走行車8,10とが共有する。各走行車8,10はレイアウト上のパラメータを開放距離に変換するテーブルを持ち、ブロッキングしたポイントを通過後、開放距離だけ走行すると、ブロッキングの解除を地上コントローラ3へ要求する。
【効果】 レイアウト情報を複雑にせずに、複数種の走行車に対して区間毎に最適な車間距離を設定できる。
(もっと読む)
物品搬送設備
【課題】搬送作業情報が発生してからその搬送作業情報に係る搬送対象物品の搬送が開始されるまでに要する時間を短縮することにより搬送効率の向上を図ることができる物品搬送設備を提供すること。
【解決手段】制御手段Hが、複数の移動体Vのうちで非作業状態の移動体Vを、物品受取用停止位置に他の移動体Vが停止していないときには、その物品受取用停止位置に走行させ、且つ、物品受取用停止位置に他の移動体Vが停止しているときには、その物品受取用停止位置の手前側に設定した待機停止位置に走行させるように、非作業状態の移動体Vの走行を制御する予備走行処理を実行するように構成されている物品搬送設備を構成した。
(もっと読む)
移動ロボット制御システム
【課題】複数のリモコン送信装置で複数の移動ロボットをそれぞれ個別に制御する際、混信を起こさないように順番にID番号及び制御命令を送信することにより、確実に複数の移動ロボットを制御することができる移動ロボット制御システムを提供すること。
【解決手段】 複数のリモコン送信装置100間を無線または有線で通信可能にし、送信許可信号をリモコン送信装置100間で送受信することによって、各リモコン送信装置100に対応する移動ロボット30への制御命令の送信タイミングを制御して制御命令が混信しないようにした。
(もっと読む)
遠隔操縦作業機の画像処理システム
【課題】無線により遠隔操縦が可能な遠隔操縦作業機において、簡素な構成で、対象地形と作業機との位置関係を容易かつ正確に把握することができるようにした、遠隔操縦作業機の画像処理システムを提供する。
【解決手段】無線信号で遠隔操縦される作業機の画像処理システムにおいて、該作業機の絶対位置を計測する第1GPS受信手段1aと、該作業機の姿勢を計測する第1姿勢計測手段2aと、該作業機とは別設され周囲の対象地形の形状を計測する地形計測装置3と、地形計測装置3の絶対位置を計測する第2GPS受信手段1bと、地形計測装置3の姿勢を計測する第2姿勢計測手段2bと、該作業機の絶対位置及び姿勢に基づいて該作業機の三次元形状を演算する作業機演算手段4と、地形計測装置3の絶対位置及び姿勢に基づいて該対象地形の三次元形状を演算する地形演算手段5と、該対象地形及び該作業機の三次元形状を重畳表示する表示手段6とを備える。
(もっと読む)
自律移動装置群制御システム
【課題】自律移動装置群制御システムにおいて、簡単な構成により、デッドロック状態の早期検出と解消によりシステムの稼働効率向上を図る。
【解決手段】本システム1の自律移動装置2は、自己の位置情報を取得する位置情報取得部と、位置情報を中央制御装置3に送信し目的地を受信する通信部と、を備え、中央制御装置3は、自律移動装置2からの位置情報を受信し目的地を送信する通信部と、位置情報に基づいて複数台の自律移動装置2のデッドロック状態を判定するデッドロック判定部と、デッドロック状態にある自律移動装置2のうち少なくとも1台の目的地を変更する指示を出すデッドロック解消部54と、を備える。デッドロック判定部は所定の距離内に所定時間よりも長く滞在している状態をデッドロック状態として判定し検出するので、判定が単純で容易であり、デッドロック状態の早期検出と解消を実現でき、システムの稼働効率を向上できる。
(もっと読む)
移動体システム
【課題】住人等の快適性を確保した上で移動体を走行させる際の有用性を高めることができる移動体システムを提供する。
【解決手段】建物10において、1階フロアのほぼ中央部であって、ダイニング13、玄関部11及び納戸16により囲まれた部位にはロボット収容室21が設けられている。ロボット収容室21には複数の部屋に直接通じる複数の出入り口22〜24が設けられており、それら各出入り口22〜24にはそれぞれ扉体25〜27が設けられている。本建物10においては、ロボット収容室21を起点及び終点として、部屋ごとの走行経路が設定される。そして、移動ロボット40は、メモリに記憶された地図情報を参照しつつ走行経路に基づいて走行する。
(もっと読む)
特異点のない運動量経路を決定するための方法およびシステム
【課題】宇宙探査機の向きを回転する操縦コマンドが受信される第1のステップを含む宇宙探査機内のCMGの配列のCMGの移動における特異点を回避する方法を提供する。
【解決手段】そこで、宇宙探査機の向きを回転するのに必要なトルクを決定する。次いで、トルクを積分して運動量経路を決定する。運動量経路は直線分の列に分解される。線分毎に、直線分にそった単位ベクトルが決定される。次いで、この単位ベクトルに垂直な平面内で線分の始点と終点とを結ぶ連続的経路があるかどうかが決定される。この単位ベクトルに垂直な平面内で経路にそった点毎に、一組のジンバル角度が決定される。
(もっと読む)
搬送台車システム
【構成】 ロードポート間通信により、各ロードポートは、他のロードポートでの搬送要求タイマの設定値Tと目標搬送量からの変位ΔHとを学習する。そして(T,ΔH)の平面を適宜の評価関数で評価し、自己よりも効率の高いロードポートを発見すると、自己の搬送要求タイマの値を高効率のロードポートでの値に近づける。
【効果】 自律的に搬送要求タイマを更新でき、しかもシステムの効率を極大化できる。
(もっと読む)
ロボット誘導システム及びロボット制御装置
【課題】簡易な構成で使用し易く且つ確実にロボットをユーザの居る場所まで誘導することが可能なロボット誘導システムの提供。
【解決手段】センサユニット3により、ロボット2からの無線信号やユーザ6からの音声が検知されてサーバ4へ無線送信される。サーバ4では、センサユニット3から送信されてきた検知情報と、予め記憶された見取り図とに基づいてロボット位置及びユーザ位置を特定するとともに、センサユニット3からの検知情報と、予め記憶されている呼び寄せ命令語情報との比較によりユーザ6がロボット2を呼び寄せているかを判定し、ロボット呼び寄せであると判定した場合、特定されたロボット位置からユーザ位置までの移動経路を算出し、この移動経路に沿って無線によりロボット2の移動制御を行う。ロボット2はサーバ4から無線送信されてきた移動制御信号に基づいてユーザ位置まで移動する。
(もっと読む)
走行台車システムおよび走行台車の走行制御方法
【課題】走行経路の迂回が必要な場合に台車を迂回走行させる構成において、迂回経路の設定に要する工程数を減らす。
【解決手段】(1)から(8)まで連番のノードの通過順序により規定される台車2Aの走行経路P1に対応して、この走行経路P1と平行で当該走行経路P1より所定距離C以上離れた位置に配置される迂回可能エリアA1を設定し、所定距離Cは、二台の台車間で接触が避けられる最小の干渉距離E以上の距離とし、走行経路P1内に当該台車2Aの進入がブロックされているノード(5)(6)があって、当該台車2Aの迂回走行が必要な場合には、その走行経路P1に対応する迂回可能エリアA1を通過する迂回経路R1を自動作成し、その迂回経路R1より所定距離C内にある(13)から(18)までの連番のノードに他の台車の進入をブロックさせる。
(もっと読む)
遠隔操作装置
【課題】運転手が不便を受けない遠隔操作又は自動運転を行う車両の遠隔操作装置を提供することを目的とする。
【解決手段】
車両の発信及び停止を遠隔操作する遠隔操作手段210を有する車両の遠隔操作装置1であって、前記車両の走行経路を格納した走行経路格納手段230と、前記車両の走行位置の周辺を監視する監視装置240と、前記監視装置240の正常時に、前記車両が前記走行経路格納手段230により格納された走行経路を、第1の状態で走行するよう走行制御し、前記監視装置の異常時に、前記車両が前記走行経路格納手段230により格納された走行経路を、異常状態に対応した第2の状態で走行するよう走行制御する車両走行制御手段220と、を有する構成とする。
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
 (もっと読む)
(もっと読む)
81 - 100 / 134
[ Back to top ]