
Fターム[5H301DD15]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 無線により与えられるもの (358)
Fターム[5H301DD15]の下位に属するFターム
光により与えられるもの (42)
電波により与えられるもの (167)
音波により与えられるもの (15)
Fターム[5H301DD15]に分類される特許
21 - 40 / 134
搬送台車システム
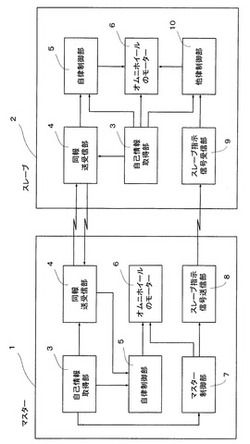
【目的】 長細い荷物や平面積が広い荷物などの特殊な荷物についても、狭い通路などの特殊な環境でも、低コストで対応することができる、搬送台車システムを提供する。
【構成】 それぞれが複数のオムニホイール付きの、複数の台車を備えており、各台車は自らの情報を取得すると共に、他の台車の情報を無線で定期的に取得することにより、マスターとの同期が必要ではない事項については、各台車(マスター及びスレーブ)が自らを自律的に制御し、発進又は停止などのマスターとスレーブとの同期が必要な事項については、マスターがその発進又は停止を指示するためのスレーブ指示信号をI/Oテレコントロール通信を使用して各スレーブに送信し、各スレーブはこれに基づいてマスターに同期して発進又は停止するようにした、搬送台車システムである。
(もっと読む)
物品搬送設備

【課題】走行台車による物品を搬送する速度の低下を避けながらも省エネルギー化を図ることができる物品搬送設備を提供する。
【解決手段】制御手段が、複数の物品移載箇所の間で物品を搬送する物品搬送作業を行わせるべく複数台の走行台車のうちから選択した作業用走行台車を、目標の物品移載箇所まで搬送用速度で走行させる搬送処理を実行するとともに、作業用走行台車と搬送処理における目標の物品移載箇所との間に、非作業用走行台車が存在する場合は、当該非作業用走行台車を、搬送用速度よりも低速の追い出し用速度で走行させて作業用走行台車の走行方向で目標の物品移載箇所よりも前方まで追い出す追い出し処理を実行する。
(もっと読む)
走行体の追従制御システム及びその制御方法
【課題】平面上を自由に走行する先導無人車に後続無人車を追従させる追従制御システムを提供する。
【解決手段】追従システム1は、第一走行体20に配置され、第一走行体および第二走行体10の位置と車体方向を特定する走行体位置検出部2と、前記車体方向から複数の進行角度を発生させる進行角度発生部3と、進行角度ごとに将来制御パラメータを計算し、第二走行体の将来位置と第一走行体との距離を計算する第一差異計算部4と、将来制御パラメータと現在制御パラメータの差異を計算する第二差異計算部5と、複数の進行角度の中から最適進行角を選定する最適進行角選定部6と、最適進行角選定部6で選定された制御パラメータを駆動機構11に出力する走行指令部7で構成される。
(もっと読む)
走行台車システム
【課題】
システムサーバと走行台車間の通信を効率的に行う。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、制御周期をアクセスポイントから走行台車への指令用の時間帯と、走行台車からアクセスポイントへの報告用の時間帯とに分割する。アクセスポイントは指令用の時間帯に目標位置を送信し、走行台車は報告用の時間帯に位置を報告する。システムサーバは報告された位置に基づいて、目標位置を決定する。
(もっと読む)
搬送車システム
【構成】 複数台の搬送車を、同一走行ルートに沿って、搬送車間の干渉を回避しながら、往復動させる。搬送車が搬送指令を実行するために走行する際の、搬送車間の干渉の有無を判断し、干渉が存在する際に、干渉を回避しながら搬送指令を実行するためのパターンを複数生成し、生成したパターンから、搬送車がパターンを実行するための時間が短いものを選択して、搬送車に実行させる。
【効果】 干渉を回避しながら短時間で搬送指令を実行でき、またパターンを短時間で生成できる。
(もっと読む)
毛状体で移動する教材用ロボット
【課題】
ロボット教材を使用した教育においては児童の興味をそそる事が重要であり、
タイヤを使った駆動方式では、動きが単調な動きとなり、利用者の興味を引きにくいと言った問題がある。
ロボット教材のプログラミングにおいて、パーソナルコンピューターなどのプログラミング装置が必要になり、ものづくり教室などの運営に必要な設備が多くなり運営の必要経費が高くなる。
【解決手段】
複数の毛状体推進装置を使用して移動することでユーモアがある動きができる教材用自走ロボットを作成した。
本発明は手書きが可能な二次元バーコードの書式と、教材用自走ロボット自体にバーコードリーダーを搭載することで、パーソナルコンピューターなどを使用しなくても、教材用自走ロボット本体だけでプログラミングを行う事を可能とした。
(もっと読む)
無人移動体の制御方法及び無人移動体
【課題】自律移動可能な半自律走行車を遠隔操縦するに際して、一旦停止させたり大幅に減速させたりすることなく、障害物の回避動作や交差点での進路変更を安全に行わせることが可能である無人移動体の制御方法及び無人移動体を提供する。
【解決手段】測距データから移動経路を作成して、移動経路上を自律して移動可能な半自律走行車Bの制御方法であって、移動中に新規操舵指令及び新規速度指令を得た時点で、これに基づく新規移動経路T上で且つ現在速度及び新規速度のうちの大きい方の移動速度に対応する制動距離内に障害物Dが有るか否かを判定し、障害物Dが有る場合には、新規移動経路Tの横に障害物回避経路Rを設定すると共に回避経路R上の障害物Dの有無を判定し、以降、障害物Dのない障害物回避経路Tが設定されるまで上記処理を繰り返し、障害物回避経路Tを設定し得ない場合には、半自律走行車Bを停止させる。
(もっと読む)
対象者検出システム、対象者検出方法、対象者検出装置および移動式情報取得装置
【課題】対象者が固定カメラの検出範囲内に所在する場合のみならず、対象者が固定カメラの非検出範囲に所在する場合を含めて対象者の所在や行動を検出すること。
【解決手段】管理装置は、固定カメラAを用いて対象者のアピアランス情報を検出し、検出したアピアランス情報に基づいて対象者の絞り込みを行う。また、管理装置は、固定カメラAおよび固定カメラBによるアピアランス情報の検出結果を用いて対象者の異常を検知する。そして、管理装置は、対象者の異常を検知すると、固定カメラAおよび固定カメラBの非検出範囲へ移動ロボットを移動させ、移動ロボットを用いて検出した顔情報に基づいて対象者を特定する。
(もっと読む)
移動ロボット
【課題】安全性向上のための近接センサを走行制御にも用いて移動ロボットの使い勝手を向上させる。
【解決手段】移動ロボットの本体を移動する移動機構と、複数の方向から移動機構に接近する物体を検知する近接センサと、近接センサの信号により、移動機構を制御する制御部と、を備え、移動ロボットが待機状態にあり、かつ、近接センサが移動ロボットの進行方向と異なる方向の物体を検知したとき、制御部が進行方向に移動機構を移動させる。
(もっと読む)
搬送システム、ロボットの制御方法
【課題】ロボットの押し搬送を効率的かつ安定的に実行可能なアルゴリズムを提供する。また、シンプルで、且つ、物体やロボットのサイズに依存しない、汎用性の高い押し搬送アルゴリズムを提供する。
【解決手段】搬送システムは、物体を押すための自走式のロボットと、物体とロボットの現在の位置を検出する位置検出手段と、位置検出手段の検出結果に基づいてロボットの移動方向を制御する制御手段と、を備える。制御手段は、ロボットが物体の位置に向かう方向の第1のベクトルと、第1ベクトルと直交し且つロボットが目標位置から離れる方向の第2のベクトルとを、物体とロボットと目標位置の現在の位置関係に応じた重みで合成することにより、ロボットの移動方向を決定する。
(もっと読む)
搬送装置の制御装置
【課題】搬送装置を構成する複数の搬送台車の走行を協調させて制御する。
【解決手段】一対の車輪をそれぞれ駆動する一対のモータを有してなる搬送台車を、前後左右に複数並べて配置して重量物を搬送する搬送装置の制御装置を、各搬送台車を制御する複数の子コントローラと、各子コントローラを統括制御する親コントローラにより構成し、親コントローラは搬送装置の原点座標と各搬送台車の台車座標を記憶しておき、旋回走行等の制御モード指令に応答して、各搬送台車の操舵角を演算して操舵角指令値及び各搬送台車の台車座標における速度指令値を演算して子コントローラに出力し、子コントローラは操舵角指令値に基づいて自己の一対の車輪を互いに正逆方向に回転させて操舵角を制御し、速度指令値に基づいてそれぞれ自己の一対の車輪の回転速度をそれぞれ制御することを特徴とする。
(もっと読む)
複数移動体の行動範囲制限システム
【課題】複数の移動体のうち、あらかじめ設定された行動範囲を逸脱した移動体に対して、設定行動範囲内に帰還するように該子機を制限するシステムを提供する。
【解決手段】本発明による行動範囲制限システムは、乗員によって運転可能な、1つ以上の子機と、前記子機の位置を制御する特定機と、前記子機及び特定機の位置情報を供給する位置測定装置とからなる。特定機202Mは、位置測定装置206から特定機及び子機の現在位置情報を取得し、子機202Sの位置が特定機によってあらかじめ設定された制限領域302を逸脱しているか否かを判断し、逸脱している場合、特定機202Mは、子機202Sに対して、前記制限領域302内の目標帰還位置に移動するように指示情報を送信する。子機202Sは、前記指示情報を受信すると、位置情報に基づいて前記目標帰還位置に移動するように移動動作部5を制御する。
(もっと読む)
無人車両遠隔操作システム
【課題】操作者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部により取得した測距データに基づいて、走行可能エリアを抽出するエリア抽出手段10aと、無人車両の走行状態を取得する走行状態取得手段10bと、取得した無人車両の走行状態と、抽出した走行可能エリアとに基づいて、走行のための操作限界を示す操作限界情報を生成する操作限界情報生成手段10cとを無人車両に設ける一方、生成した操作限界情報を表示部に表示させる操作限界情報表示手段を遠隔操作装置に設けている。
(もっと読む)
コークス炉の移動機の位置検出装置及び位置検出方法
【課題】コークス炉の移動機の現在位置を正確且つ安価に検出できる位置検出装置及び位置検出方法を提供する。
【解決手段】位置検出装置は、レール31〜35に接し移動機21〜25の移動に伴って回転するローラ42の絶対的な回転角度を測定するアブソリュート回転角度検出装置41を備え、移動機21〜25の現在位置を示す位置情報を出力する位置情報出力手段と、位置情報出力手段により出力された移動機21〜25の位置情報の誤差を修正する誤差修正手段と、を備える。誤差修正手段は、コークス炉10に設置された基準標識51と、移動機21〜25に搭載され基準標識51を検出する非接触式センサ52と、非接触式センサ52により基準標識51を検出した場合には、その時点において位置情報出力手段から出力された移動機21〜25の位置情報を、基準標識51に予め付与された基準位置情報に置換する位置情報置換手段と、を備える。
(もっと読む)
無人走行車両の遠隔操縦装置
【課題】テレビカメラの映像を利用して無人走行車両を遠隔操縦する場合に、テレビカメラの映像信号の伝送遅れによる操縦への悪影響を低減する。
【解決手段】無人走行車両1に取り付けられたテレビカメラ2からの前方視界の映像信号と各種センサ3からの車両1の走行情報信号を無線により車外の操縦席5に伝送し、このうち信号の容量が非常に多いため伝送遅れが生じた映像信号を、画像処理装置7によって信号の容量が少なく伝送遅れを無視できるリアルタイムの走行情報信号に基づき補正し、遅れのない本来の画像に相当する画像を推定して抽出し、操縦席5にあるテレビモニタ8に表示する。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
遠隔協調輸送手段のためのシステムおよび方法
輸送手段システムを制御するための方法およびアーキテクチャシステムを開示する。一実施形態において、輸送手段を遠隔制御する方法は、輸送手段の位置を推定することを含む。位置推定アルゴリズムは、輸送手段の位置を推定することができる。輸送手段から受信された位置データパケットを用いて、輸送手段の推定位置を更新できる。表示装置は、更新された輸送手段の推定位置に基づいて輸送手段の仮想表現を表示してもよい。表示された輸送手段の仮想表現に基づいて、コマンド信号を輸送手段へ伝達してもよい。  (もっと読む)
(もっと読む)
安全制御システムおよび安全制御方法
【課題】 設備内に進入する移動体を無線で安全に制御できるようにする。
【解決手段】 安全制御システム1において、制御対象領域A〜Dにそれぞれ対応して設置され、無線により移動ロボット10を停止させるための停止スイッチ2a〜2dと、制御対象領域A〜Dに進入する移動ロボット10を検知するアンテナ4a〜4eと、各アンテナ4a〜4eで検知された移動ロボット10に対して停止スイッチ2a〜2dを有効にするとともに、停止スイッチ2a〜2dの操作に基づいて当該停止スイッチに対応する移動ロボット10を停止させるよう制御する制御部とを設ける。この場合には、移動ロボット10の進入の度に当該移動ロボット10が検知されて、停止スイッチ2a〜2dが当該移動ロボット10に対して有効にされるので、制御対象領域内に進入する移動ロボットを無線で安全に制御できるようになる。
(もっと読む)
手投げ型ロボット
【課題】ロボットなどに用いられる新たな移動機構の提案。
【解決手段】移動機構として、モータの制御機能を有する本体と、本体の両側に対に設けられ本体に対して回動自在であり走行面に接地する駆動輪と、それぞれの駆動輪をモータでそれぞれ回転させる駆動手段と、それぞれの駆動輪の外側に、走行面に接地すると共に、駆動輪の回動と独立して本体との位置を固定的に保持される保持体とを有する。
(もっと読む)
搬送システムにおける制御方法
【課題】搬送台車の原動機の異常が発生しても、異常の状態に応じて走行可能かどうかの判断を自動的に行い、搬送台車の停止による搬送システム全体の停止時間を短縮する。
【解決手段】搬送台車がモータの異常で停止した場合に、搬送台車は、現状走行可能かどうか判断する(S5)。現状走行可能であると判断すると、搬送システムを再稼動させる(S8)。走行が不可能と判断すると、加速度および速度の少なくとも一方を下げた状態で走行可能かどうか判断する(S6)。走行不可能と判断すると、片輪での駆動で走行可能かどうか判断する(S7)。低加速度・低速度走行判断又は、片輪走行可否判断で走行可能と判断した場合には、搬送システムを自動で再稼動させる(S14、S16)。
(もっと読む)
21 - 40 / 134
[ Back to top ]