
Fターム[5H303BB11]の内容
位置、方向の制御 (6,897) | 位置決め対象の種類(次元、軸) (1,310) | 対象が直線軸のみに沿って移動するもの (187)
Fターム[5H303BB11]の下位に属するFターム
直線軸が直交軸であるもの (93)
Fターム[5H303BB11]に分類される特許
1 - 20 / 94
位置制御装置
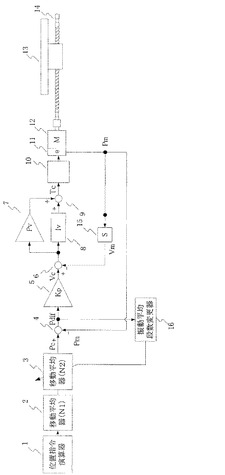
【課題】送り軸駆動系の剛性が低下した場合に、低周波の振動が発生せず、安定に動作させる位置制御装置を提供する。
【解決手段】移動平均段数変更器16は、位置偏差Pdifの変動に基づき、移動平均器3の移動平均段数N2を変更する。移動平均段数変更器は、位置偏差をFFT演算器にて周波数解析し、スペクトラム最大値を算出する。算出されたスペクトラム最大値が予め設定した比較値を超えた場合に、移動平均段数変更器は、移動平均段数を増加させる指令を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
(もっと読む)
トリガ発生装置

【課題】 サーボモータに同期して稼動する外部装置に対して作動を指示するトリガ信号を高精度に出力することが可能なトリガ発生装置を提供する。
【解決手段】 位置検出器のサンプリング開始からトリガ信号を発生させるタイマ設定時間を算出するまでに要する時間をサーボ側遅延時間とし、トリガ発生装置がトリガ信号を出力してから外部装置が作動を開始するまでに要する時間を外部装置側遅延時間とするとき、本発明のトリガ発生装置は、サーボモータの位置情報から算出された外部装置が作動開始位置に到達するまでの到達所要時間からサーボ側遅延時間及び外部装置側遅延時間を減算してタイマ設定時間を算出するタイマ設定時間算出部と、タイマ設定時間に基づきトリガ信号を出力するトリガ信号出力部と、を有する。
(もっと読む)
位置決め制御装置、これを備えた工作機械
【課題】送り装置の加速性能を損なうことなく、位置決め精度を高めることができ、従来に増して高精度な位置決めを行うことができる位置決め制御装置、工作機械を提供する。
【解決手段】移動体と、移動体を送り軸方向に案内する案内機構部及び移動体を移動させる駆動機構部を有する送り装置と、送り装置を支持する構造体2と、駆動機構部の作動を制御して、工作機械上の基準位置に対する移動体の移動位置を制御する制御装置20とを備え、更に、前記構造体の変位に起因した前記基準位置に対する前記送り装置の前記送り軸方向における変位を導出する導出部11,28と、導出部11,28により測定された変位データを受信して、この変位を打ち消すための修正データを、制御装置20における制御信号に加算する加算部27とを備える。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】位置決め精度の向上に有利な技術を提供する。
【解決手段】位置決め装置は、ステージと、ベースと、前記ステージと前記ベースとの間に配置されていて、ばね性を有する支持部で前記ステージを支持する支持機構と、前記ステージを駆動するように前記ステージと前記ベースとの間に配置されたアクチュエータと、前記アクチュエータを制御する制御部とを備える。前記制御部は、目標位置に対する前記ステージの位置偏差と、前記ステージと前記ベースとの相対位置の変動量とに基づいて、前記位置偏差が低減され、かつ、前記支持部の前記ばね性によって前記ステージに作用する力の少なくとも一部が打ち消されるように前記アクチュエータを制御する。
(もっと読む)
線形運動デバイスの制御装置
【課題】検出磁場と線形運動デバイスの位置とにずれがある場合でも、線形運動デバイスを正確に位置決めすることができる線形運動デバイスの制御装置を提供する。
【解決手段】デバイス11の磁石19が発生する磁場を検出し、検出された磁場の値に応答する出力信号VMOを出力する磁場センサ113、制御信号VCM[2:0]と出力信号VMOの振幅とを関連付けた電圧指令信号VCOを生成する電圧信号生成回路114、出力信号VMOと電圧指令信号VCOとの偏差を増幅して出力信号VEOを生成する差動増幅器115、出力信号VEOの値に応じて線形運動デバイス11を駆動する出力ドライバ112と、出力信号VEOを、磁場センサ113から出力される出力信号VMOの振幅に応じて補正し、出力ドライバ112への入力信号を生成するゲイン補正回路116によって制御装置を構成する。
(もっと読む)
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
制御パラメータ推定方法及び制御パラメータ設定装置
【課題】 送り装置において、移動体の位置や各指令移動位置を補正する制御を的確に行う。
【解決手段】 送り装置の制御において、駆動モータに入力されるトルク値をTとして、移動体を軸方向に往復動させ、一定時間毎又は移動体の予め定められた位置毎の駆動モータの角速度ωを計測し、計測された各角速度ω及びその時の前記入力トルクTを基に、下式に従って、各角速度ω及び入力トルクTに応じたパラメータTdを算出した後、算出したパラメータTdの前記位置への依存が小さくなるように、パラメータJ及びDの少なくとも一方の値を調整して、パラメータTdを再算出し、得られた調整後のパラメータJ、D及びTdの値を該パラメータJ、D及びTdの適正な値と推定する。
(数1)
Td=T−J(dω/dt)−Dω
(もっと読む)
電磁アクチュエータ、ステージ装置およびリソグラフィ装置
【課題】改良された電磁アクチュエータを実現する。
【解決手段】電磁アクチュエータが、互いに移動可能であり磁気回路を形成するように配置されている第1の磁性部材および第2の磁性部材と、使用時に電流を受け取って磁気回路を通る磁束を発生し、それによって第1の磁性部材と第2の磁性部材の間で第1の方向に力を発生するように構成されたコイルとを含み、磁束は、使用時に第1の磁性部材と第2の磁性部材の間で、第1の磁性部材の第1の面および第2の磁性部材の第2の面を通して伝達され、第1の面と第2の面がエアギャップによって分離され、第1の面および第2の面は互いに、第1の面の外形寸法が第2の面の外形寸法を越えて、第1の方向にほぼ垂直の第2の方向に延びるように配置される。
(もっと読む)
搬送装置
【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
位置制御装置
【課題】簡素な構成で可動部材の位置を高精度に検出するとともに、高精度に停止位置の制御ができる位置制御装置を提供する。
【解決手段】直流電気モータ39〜42と、電気モータによって可動部材を移動させる移動手段2と、ブラシとコミュテータとの間の断続によって電気モータへの供給電流に発生するリップル成分を抽出してパルス化したリップルパルスを出力するパルス検出部38と、可動部材が移動されるときの現在位置を示す現在位置情報をリップルパルスに基づいて演算し記憶する現在位置情報記憶部44と、電気モータ39〜42に供給される電流が0となる前に可動部材が停止するように電流を低下させる電流制御装置45と、を備える。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
送り装置
【課題】サーボロック時の消費電力を削減することができる送り装置を提供する。
【解決手段】送り装置1は、ボールねじ21,ナット23,駆動モータ24,ブレーキ機構25及び制御装置50を備え、移動体13を上下方向に移動させる。制御装置50は、移動体13に関する早送りの移動指令を認識すると、移動体13を現在位置から上方向に移動させる場合には、早送りの移動指令に係る目標移動位置を越えて移動体13を移動させた後、移動方向を反転させて目標移動位置に移動体13を移動,停止させる一方、現在位置から下方向に移動させる場合には、移動体13を目標移動位置に直接移動,停止させるとともに、移動体13を目標移動位置に移動,停止させた後、駆動モータ24によって移動体13の位置を停止位置に維持し、且つブレーキ機構25によって移動体13の移動を制動する。
(もっと読む)
制御装置、及び制御方法
【課題】位置フィードバック機構を用いたモータの制御において、整定時間を短縮することができる制御装置を提供する。
【解決手段】制御装置は、外部より一定間隔ごとに入力される位置指令値から位置指令値の変化量を算出し、算出した変化量に基づいて、モータにおいて生じる位置指令値に対する動作の遅れを補正する補正値を算出する位置指令補正部と、補正値により位置指令値を補正した補正位置指令値に応じた電力をモータに供給する駆動部とを具備する。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
位置決め機構
【課題】可動体に載せられる物体の重さの影響を排除できる位置決め機構を提供すること。
【解決手段】固定体3と固定体3に対して移動する可動体2とからなる装置において、可動体2の一方に設けられ、固定体3に向って延出する係止具41を有する凸部材4と、固定体3に設けられ、二箇所の突出部であるピン51,51を有し、位置決めの際にピン51とピン51との間に係止具41が嵌入することによって可動体2を固定部3に対して位置決めすることができる凹部材5と、係止具41をピン51とピン51との間から離脱させる変位手段とを備える。
(もっと読む)
エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システム
【課題】エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システムを提供する。
【解決手段】リニア・エンコーダ23は、移動式往復台25の側面に設置した一対の側面リニア・エンコーダ23−1、23−1’と、移動式往復台25の一側部の下部に設置した一対の下面リニア・エンコーダ23−2、23−2’とで構成され、このように構成されたリニア・エンコーダ23が、基準マーク、垂直位置誤差を補償するためのLトラック、および水平位置[誤差]を補償するためのTトラックを有するスケールに沿って移動することで、高い精度レベルで平面度、ピッチ、真直度、ヨー、およびロールに関連した誤差を補償するものであり、したがって、加工することが不可能である部分を最小限にし、加工コストを減少させ、精密なステージを実現する。
(もっと読む)
自動ドア駆動制御装置
【課題】本発明は、特定の速度域において最適となるように調整された制御ゲインがその速度域以外では最適な制御ゲインとならないことに起因する速度の不安定性を解消でき、制御の応答性を向上できる自動ドア駆動制御装置を提供することを課題とする。
【解決手段】本発明による自動ドア駆動制御装置では、フィードバック速度制御部32は、自動ドアのドア体を開閉するモータ10への入力電圧20aを、速度指令43aと検出開閉速度60aとに基づいて制御することで、ドア体の開閉速度制御を行う。ゲイン変更部33は、ドア体の現在位置42aに応じてゲイン変更指令33aをフィードバック速度制御部32に入力して、フィードバック速度制御部32の開閉速度制御の制御ゲインを変更する。
(もっと読む)
制御方法及び制御装置
【課題】移動体を高精度に位置決め制御することができる制御装置などを提供する。
【解決手段】制御装置1は、与えられた目標移動位置及び移動速度を基に指令移動位置を生成し、生成した指令移動位置を基に送り装置50の駆動モータ73を制御する制御信号生成部12と、学習制御部16と、移動体52を往復動させたときに生じる送り装置50の転動体に起因した摩擦力又はこれと等価な力で定義される外力と移動体52の移動位置との相対データを基に、移動体52を目標移動位置に移動させた際に生じると推定される外力と移動体52の移動位置との相対データを推定するデータ推定部22、推定された相対データを基に推定外力を算出して各指令移動位置における移動誤差量を推定する誤差推定部23、及び推定された移動誤差量を基に補正量を算出して学習制御の初期値として設定する補正量設定部24から構成される初期値設定部21とを備える。
(もっと読む)
並列スライダ装置の制御装置および制御方法および測定装置
【課題】並列スライダ装置において、二つのスライダが相互に干渉することなくスムーズな動きをもって移動することを実現すること。
【解決手段】
前側リニアサーボモータ72のための前側サーボコントローラ110と後側リニアサーボモータ80のための後側サーボコントローラ130とに互いに同一の位置指令を与える一方で、前側リニアサーボモータ72は比例要素と少なくとも積分要素と微分要素の何れか一方を含むPI制御あるいはPD制御あるいはPID制御を行い、後側サーボコントローラ130は比例要素のみを含むP制御を行い、前側サーボコントローラ110と後側サーボコントローラ130とで制御ゲインを互いに相違させる。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
1 - 20 / 94
[ Back to top ]