
Fターム[5H303CC03]の内容
Fターム[5H303CC03]に分類される特許
1 - 20 / 133
モータ制御装置
電動機の位置制御装置
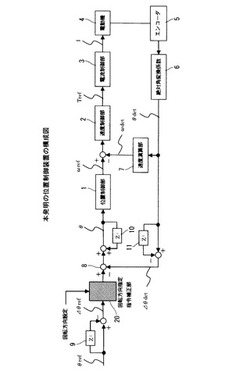
【課題】位置指令と位置検出の差演算に基づいて位置制御すると、任意の回転方向を指定しての位置制御ができず、また検出器の分解能によっては安定に位置制御ができない。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
(もっと読む)
位置制御装置

【課題】送り軸駆動系の剛性が低下した場合に、低周波の振動が発生せず、安定に動作させる位置制御装置を提供する。
【解決手段】移動平均段数変更器16は、位置偏差Pdifの変動に基づき、移動平均器3の移動平均段数N2を変更する。移動平均段数変更器は、位置偏差をFFT演算器にて周波数解析し、スペクトラム最大値を算出する。算出されたスペクトラム最大値が予め設定した比較値を超えた場合に、移動平均段数変更器は、移動平均段数を増加させる指令を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
(もっと読む)
不感帯処理部を備えた電動機の制御装置
【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
追尾装置
【課題】大きな角速度を必要とせず、全天に渡り目標の自動追尾を可能とする。
【解決手段】追尾装置は、球状胴体と、第1から第3ジンバルと、可動体と、球体駆動部と、駆動保持部と、目標位置認識部と、第1から第4角度センサと、回転バネ駆動部と、制御部と、を備えている。駆動保持部は、第3ジンバルと可動体とを接続し、球体駆動部を球状胴体に押圧した状態に保持する。目標位置認識部は、可動体に支持され、目標の位置データを出力する。第1から第3角度センサはそれぞれ、第1から第3ジンバルの第1から第3回転角度を検出する。第4角度センサは、第3ジンバルに対する可動体の第4回転角度を検出する。回転バネ駆動部は、第3ジンバルを回転中心に戻す。制御部は、位置データ、及び第1回転角度から第4回転角度までを使用して、目標を追尾するように球体駆動部を制御する。
(もっと読む)
ステージ装置およびこれを用いた観察装置
【課題】観察サンプルを載置する可動テーブルをウォーキング形ピエゾモータにより駆動するピエゾステージと、前記ピエゾステージの移動を制御するステージ制御装置を有するステージ装置において、ピエゾステージの周期的な速度変動を抑制して、観察者がサンプルの移動を行う際の操作性と位置決め精度を向上する。
【解決手段】ピエゾステージ1のウォーキング形ピエゾモータ102を駆動する指令電圧標準データ304と、前記ウォーキング形ピエゾモータ102の出力に一定速度を与える様に予め測定した指令電圧出力タイミング補正データ305と、少なくとも前記指令電圧標準データ304および前記指令電圧出力タイミング補正データ305から前記ウォーキング形ピエゾモータ102を駆動する指令電圧を生成する指令電圧生成部302を有するステージ装置3が提供される。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
モータ駆動装置
【課題】最適なゲイン設定ができるゲイン切換判定手段を有したモータ駆動装置を提供する。
【解決手段】トルク指令25どおりにモータを駆動させるよう制御する電流制御手段3と、ゲイン切換信号34で選択されたゲインで制御する速度フィードフォワード手段4と、ゲイン切換信号34で選択されたゲインで制御するトルクフィードフォワード手段5と、モータ速度30を算出する速度検出手段6と、位置指令速度31を算出する位置指令速度検出手段7と、ゲイン切換信号34をオン/オフするゲイン切換判定手段8と、判定遅延時間設定手段9と、判定閾値設定手段10とを有し、ゲイン切換判定手段8にて判定遅延時間32経過後の位置指令速度31の絶対値が判定閾値33以下であればゲイン切換信号34をオンし、判定閾値33より大きい場合はゲイン切換信号34をオフのままとする。
(もっと読む)
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置
【課題】少ない演算量で機械の振動を抑制することが可能な指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置を提供する。
【解決手段】指令発生装置20の設計方法は、関数a(t)を設定するステップと、関数a(t)をラプラス変換して関数A(s)を求めるステップと、極を定める減衰係数がそれぞれ0、かつ極を定める固有角周波数が、それぞれ関数a(t)に含まれるパワーが0の異なる周波数ωsであり、零点が、それぞれ複数の振動成分をもつシステムの各振動極であり、定常ゲインがそれぞれ1となる複数の2次の伝達関数G1(s)〜Gn(s)(nは自然数)を設定するステップと、関数A(s)と伝達関数G1(s)〜Gn(s)とを乗じて関数Fb(s)を求めるステップと、関数Fb(s)を逆ラプラス変換して関数fb(t)を求めるステップとを含む。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
4軸アライメントステージ
【課題】 4つの各駆動ユニット同士の機械的な姿勢の干渉による過剰な出力を防止する。
【解決手段】 ベース1と上部プレート2との間における上部プレート2の一方の対角位置と対応する2個所に、XYθガイド4とX軸方向のボールねじ直動機構6からなるX軸方向駆動ユニット3xを介装し、上部プレート2の他方の対角位置と対応する2個所に、XYθガイド4とY軸方向のボールねじ直動機構6からなるY軸方向駆動ユニット3yを介装する。リニアスケール13の検出値に基づくフィードバック制御を行うX軸方向駆動ユニット3xに比して、Y軸方向駆動ユニット3yは、ボールねじ直動機構6のサーボモータ12に設けたモータエンコーダ16による検出値に基づくフィードバック制御を行うことでサーボ剛性が小さくなるようにして、姿勢干渉による推力上昇分をY軸方向駆動ユニット3yで機械的に吸収させる。
(もっと読む)
位置決め装置及び位置決め方法
【課題】高速かつ高精度に位置決めすることが可能な位置決め装置を提供する。
【解決手段】外乱相殺信号生成部において、粗動機構アクチュエータ電流センサによって検出される粗動機構アクチュエータ駆動電流信号と粗動機構から提供される粗動機構センサ信号とから粗動機構を駆動する力またはトルクを求めるとともに、さらにこの粗動機構の駆動力または駆動トルクと、粗動機構及び微動機構のセンサ信号と、機構パラメータ記憶部に記憶された粗動機構及び微動機構に関する機構パラメータとから、粗動機構の動作により微動機構に発生する外乱量を求め、この外乱量を打消すための外乱相殺信号を生成して微動機構制御信号に加算する位置決め装置を提供する。
(もっと読む)
1 - 20 / 133
[ Back to top ]