
Fターム[5H303FF03]の内容
Fターム[5H303FF03]の下位に属するFターム
アナログ信号であるもの (38)
デジタル信号であるもの (84)
Fターム[5H303FF03]に分類される特許
1 - 20 / 125
位置制御装置
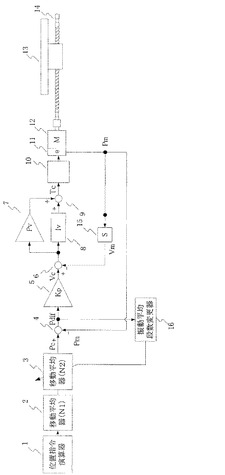
【課題】送り軸駆動系の剛性が低下した場合に、低周波の振動が発生せず、安定に動作させる位置制御装置を提供する。
【解決手段】移動平均段数変更器16は、位置偏差Pdifの変動に基づき、移動平均器3の移動平均段数N2を変更する。移動平均段数変更器は、位置偏差をFFT演算器にて周波数解析し、スペクトラム最大値を算出する。算出されたスペクトラム最大値が予め設定した比較値を超えた場合に、移動平均段数変更器は、移動平均段数を増加させる指令を移動平均器3へ出力する。移動平均器3は移動平均段数をN2からN2’へ変更して移動平均処理を行う。
(もっと読む)
ステージ移動装置及び無接点充電器

【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
位置決め装置
【課題】外部からの入力信号により、モータの回転位置を目標の位置に到達するまで移動して停止するのに好適な位置決め装置を提供する。
【解決手段】従来の位置決め装置にタイマカウンタラッチ処理部31と比率計算部32とを付加し、外部からの入力信号が発せられると、タイマカウンタのカウンタ値をラッチし、新たなサンプル信号が発せられると、このときのタイマカウンタのカウンタ値をラッチするとともに、比率計算部32ではこれらの値と、このときモータ位置演算部13が出力したモータ1の出力軸の回転位置の今回値,前回値と、サンプル信号の周期のカウント値とに基づく比率計算を行い、ラッチタイミングモータ位置とする。この値と移動量設定部14の出力値との加算演算をした値をモータ1の回転軸の位置決め目標値とし、モータ1の回転軸は、前記入力信号が発せられたタイミングの位置を起点として、移動量設定部14の出力値だけ移動して停止する。
(もっと読む)
指令生成装置
【課題】基準軸の位置に同期させたセンサフィードバック制御を可能にするモータ駆動制御システムを実現するための指令生成装置を得る。
【解決手段】機械装置の状態をセンサ5で検出して機械装置を駆動するモータ4をセンサフィードバック制御するモータ制御装置3に対して、基準軸の位置とセンサフィードバック制御の指令値の対応関係を示す指令プロファイルに基づいて、基準軸の位置に対応したセンサフィードバック制御の指令値の詳細を演算して出力する。
(もっと読む)
サーボモータ制御装置及びサーボモータ制御方法
【課題】動作履歴や経年変化による案内面抵抗の変化に影響を受けにくくして誤差の発生を抑制し、加工面品位を向上させると共に、様々な運転条件にも対応可能とする。
【解決手段】サーボモータ制御装置1は、反転動作の開始と終了とを判断する反転動作判定装置20と、位置指令値Xiと検出位置情報との間の位置誤差を算出する減算器14と、算出された位置誤差から補正量を演算して記憶する補正量演算記憶装置23と、補正量演算記憶装置23に記憶された補正量で検出位置情報を補正する検出位置補正装置24と、を備え、検出位置補正装置24は、反転動作の開始判断に伴い、補正量演算記憶装置23に記憶された補正量で検出位置情報を補正する一方、補正量演算記憶装置23は、当該補正後のテーブル7の移動制御によって得られる検出位置情報と位置指令値Xiとの間の位置誤差から新たな補正量を演算して次回の反転動作の際に用いる補正量を更新する。
(もっと読む)
演算ユニット、出力制御方法、およびプログラム
【課題】カムテーブルの切り換えを迅速に行なうことが可能なPLCの演算ユニットを提供する。
【解決手段】PLCのCPUユニットは、モーション制御とシーケンス制御とを実行する。CPUユニットは、カムテーブルを用いたモーション制御を行なうための制御プログラムと、第1のカムテーブルおよび第2のカムテーブルとを格納している。マイクロプロセッサは、制御プログラムの実行中に予め定められた指示を受け付けると、制御プログラムの実行に用いるカムテーブルを第1のカムテーブルから第2のカムテーブルに切り換える。マイクロプロセッサは、カムテーブルの切り換えに基づき、第2のカムテーブルを用いた制御プログラムの実行結果を制御対象機器に出力する。
(もっと読む)
リソグラフィ装置およびステージシステム
【課題】正確なショートストローク位置決めを提供する。
【解決手段】ステージシステムは、オブジェクトを保持するオブジェクトテーブルと、第1の移動範囲にわたりオブジェクトテーブルを移動させるショートストロークアクチュエータ素子と、第1の移動範囲よりも大きい第2の移動範囲にわたりショートストロークアクチュエータ素子を移動させるロングストロークアクチュエータ素子と、を備える。ステージシステムは、ショートストロークアクチュエータ素子上の空気外乱力を表す量を測定するセンサと、空気外乱を少なくとも部分的に補償する補償力を提供するアクチュエータと、コントローラと、を有する空気式補償デバイスをさらに備える。センサはコントローラのコントローラ入力に接続され、アクチュエータはコントローラのコントローラ出力に接続される。コントローラは、センサから受け取る信号に応答してアクチュエータを駆動する。
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
位置決め装置
【課題】バックラッシに起因する位置決め精度の低下を抑えることのできる位置決め装置を提供する。
【解決手段】位置決め装置のコントローラは、正方向用の補正マップと逆方向用の補正マップ、及び、移動台を移動させる際の基準位置を記憶している。コントローラは、以下の処理、即ち、(1)移動台が基準位置から既定の閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する更新処理、(2)基準位置と目標位置との間の距離が閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が閾値未満であり、かつ、最新の基準位置が設定されてから1回は移動方向が反転している場合には、両方向の補正マップを用いてセンサによる位置計測値を補正する補正処理、(3)補正後の位置計測値を目標位置に一致させる制御処理と、を実行する。
(もっと読む)
装置およびその制御方法
【課題】装置本体を支持する4以上の複数の脚を全て接地させつつ、装置本体を水平状態とする。
【解決手段】本発明の装置は、装置本体と、前記装置本体を支持する伸縮可能な4以上の複数の脚と、前記装置本体が水平状態であるか否かを検出し、検出結果を示す検出信号を出力する水平センサと、前記複数の脚を伸縮させ、前記装置本体が水平状態である旨を示す検出信号である水平信号が前記水平センサから出力されると、前記複数の脚のそれぞれについて、前記装置本体が水平状態ではない旨を示す検出信号である非水平信号が前記水平センサから出力されるまで伸張させる伸張処理と、前記伸張処理の結果、前記非水平信号が前記水平センサから出力されると、前記水平信号が前記水平センサから出力されるまで収縮させる収縮処理とを行う制御部と、を有する。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 パターンの重ね合わせ精度の低下及び露光量の均一性の低下を抑制した走査露光装置を提供する。
【解決手段】 原版9と基板8とを走査しながら前記基板の複数のショット領域を露光する走査露光装置は、前記基板を保持して移動するステージ10と、前記ステージの移動を規定する駆動プロファイルに基づいて前記ステージの移動を制御する制御部15と、を備える。前記駆動プロファイルのうち少なくとも1つのショット領域の露光中の前記ステージの移動を規定する部分は、前記ステージの制御系における共振周波数よりも低い周波数の正弦波から構成されている。
(もっと読む)
加工を高精度化するサーボ制御システム
【課題】角度同期方式の長所を生かしつつ、基準角度が与えられない場合でも角度同期方式の学習制御の適用を可能にするサーボ制御システムの提供。
【解決手段】サーボ制御システム10は、各軸を駆動するX軸サーボモータ12、Y軸サーボモータ14及びZ軸サーボモータ16をそれぞれ制御するX軸サーボ制御装置18、Y軸サーボ制御装置20及びZ軸サーボ制御装置22を有する。またX軸サーボ制御装置18及びY軸サーボ制御装置20は、上位制御装置24から送られる各軸指令に基づいて、単調増加又は一方向に変化する基準信号θを作成する基準信号生成部28及び32をそれぞれ有し、学習制御器26及び30は該基準信号に基づいて学習制御を行う。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
ステージ装置,それを用いた荷電粒子線装置及び縮小投影露光装置,およびステージ制御方法
【課題】高速かつ高精度位置決めを実現できるステージ装置,それを用いた荷電粒子線装置及び縮小投影露光装置,およびステージ制御方法を提供することにある。
【解決手段】ステージ装置は、ステージ10を駆動するモータ30と、モータにより駆動されるステージの位置が最終目標位置となるような前記アクチュエータの駆動量を算出するステージ制御演算器100を有する。ステージ制御演算器100は、ステージの目標位置とステージの位置の差分に基づいて、PID制御する補償演算器120を有する。また、ステージの特性を同定するモデル同定器130と、モデル同定器によって得られた情報を基に、補償演算器におけるステージ制御用補償パラメータを演算する制御ゲイン演算器140を備える。
(もっと読む)
位置制御装置
【課題】フルクローズ位置制御において、極低速域の送りで発生するスティックスリップを抑制することができる位置制御装置を提供する。
【解決手段】加算器5および加算器24が、実速度偏差Elに比例ゲインPlを乗算して得られた出力と、実速度偏差Elを積分補償器25に入力して得られた実速度偏差の積分成分Tilと、モータ速度偏差Emに比例ゲインPmを乗算して得られた出力と、モータ速度偏差Emを積分補償器9に入力して得られたモータ速度偏差の積分成分Timと、を加算しトルクフィードバック指令Tfbとして出力する。このとき、積分補償器25と積分補償器9は、積分ゲインKlと積分ゲインKmを速度フィードフォワード指令Vrまたは速度指令Vcの値に応じて調節するために、0から1の間で可変できる係数可変器を備え、ロストモーションの影響が小さい極低速域において積分ゲインKlを大きく設定することで静摩擦トルクから動摩擦トルクへの切換応答速度を早め、スティックスリップを抑制する。
(もっと読む)
プローブユニット相対的平行度調整装置、プローブユニット相対的平行度調整方法、プローブユニット相対的平行度調整プログラム、プローブユニット及びパネル搬送部材
【課題】 帯状電極が短手方向に並設されているパネル部材に対し、各帯状電極と接触するプローブを設けたプローブユニットが相対的に平行であることの確認・調整を短時間で実行できる装置を提供する。
【解決手段】 本発明の装置は、パネル部材に対するプローブユニットの相対的平行度を調整する傾き調整機構と、プローブユニット及びパネル部材間の距離を検出する複数のセンサと、プローブ及び帯状電極が相対的に接近して接触する前後の各センサからの出力を取り込むセンサ出力取込手段と、取り込んだ各センサの出力に基づいて、プローブユニットの平行度調整において参照する情報を形成する調整参照情報形成手段とを備えたことを特徴とする。
(もっと読む)
並列スライダ装置の制御装置および制御方法および測定装置
【課題】並列スライダ装置において、二つのスライダが相互に干渉することなくスムーズな動きをもって移動することを実現すること。
【解決手段】
前側リニアサーボモータ72のための前側サーボコントローラ110と後側リニアサーボモータ80のための後側サーボコントローラ130とに互いに同一の位置指令を与える一方で、前側リニアサーボモータ72は比例要素と少なくとも積分要素と微分要素の何れか一方を含むPI制御あるいはPD制御あるいはPID制御を行い、後側サーボコントローラ130は比例要素のみを含むP制御を行い、前側サーボコントローラ110と後側サーボコントローラ130とで制御ゲインを互いに相違させる。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
1 - 20 / 125
[ Back to top ]